福岛铁公司
由于某种原因,在福岛核电站的应急现场,俄罗斯很少有人知道使用各种机器人的真实情况。公众有一个明确的刻板印象: 实际上,已经使用了数百台各种遥控机器人,并且它们被用于各种工作中,以消除福岛核电站事故的后果(为了FAES,我可能会写更多)。遥控汽车的使用规模比切尔诺贝利核电站要大得多,原因很简单:所有这些设备在过去30年中都得到了巨大发展,并且切尔诺贝利核电站的事故比切尔诺贝利核电站更广泛。
实际上,已经使用了数百台各种遥控机器人,并且它们被用于各种工作中,以消除福岛核电站事故的后果(为了FAES,我可能会写更多)。遥控汽车的使用规模比切尔诺贝利核电站要大得多,原因很简单:所有这些设备在过去30年中都得到了巨大发展,并且切尔诺贝利核电站的事故比切尔诺贝利核电站更广泛。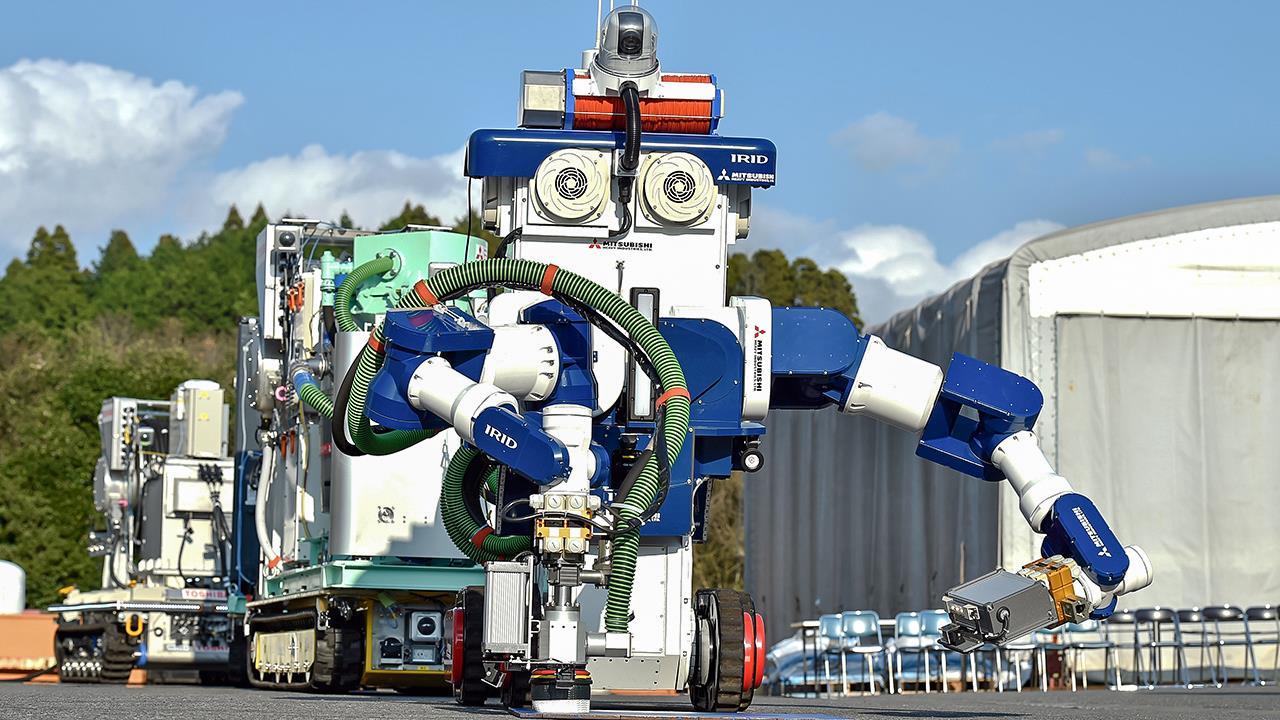 机器人吸尘器,福岛日语版。在看机器人之前,至少可以从总体上想象一下,事故发生后过去6年中该工作是在FAES上进行的。
机器人吸尘器,福岛日语版。在看机器人之前,至少可以从总体上想象一下,事故发生后过去6年中该工作是在FAES上进行的。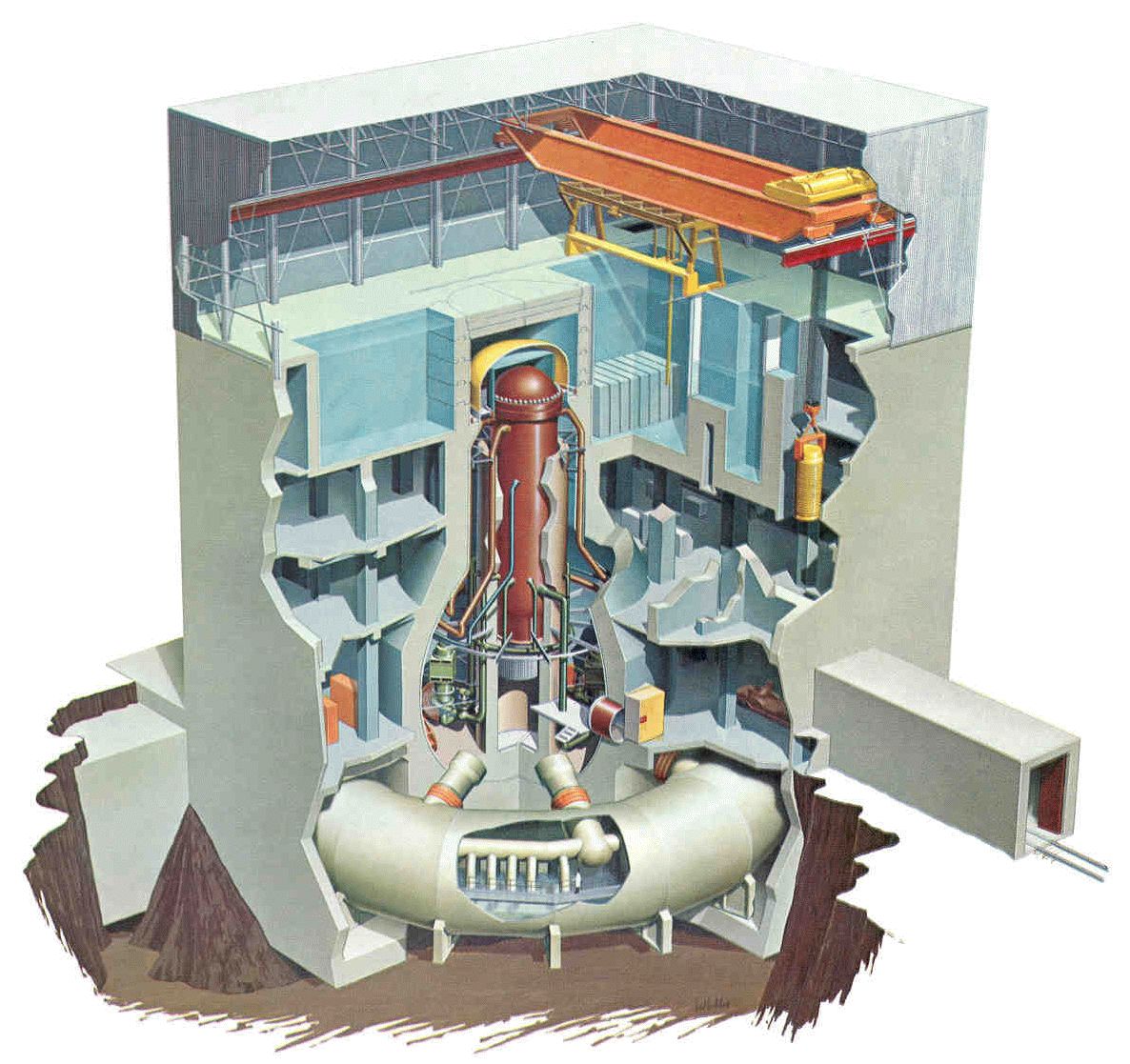 这张简化的图片给出了福岛核电站组件设计的总体思路:反应堆位于中心(棕色),位于梨形混凝土容器的中心,内部有很多设备。在反应堆的右上方有一个储水池,在反应堆的正下方有一个用于控制杆和保护杆致动器的空间(与PWR不同,它们是从BWR下方从AZ引入AZ 的)。在反应堆下方和周围有一个环形鼓泡池,设计用于在主反应堆容器严重破裂的情况下冷凝蒸汽。在11年末将1,2,3号区块的反应堆置于“冷停机”状态(即,将反应堆中的乏燃料冷却至100 C及以下)之后,制定了以下任务:
这张简化的图片给出了福岛核电站组件设计的总体思路:反应堆位于中心(棕色),位于梨形混凝土容器的中心,内部有很多设备。在反应堆的右上方有一个储水池,在反应堆的正下方有一个用于控制杆和保护杆致动器的空间(与PWR不同,它们是从BWR下方从AZ引入AZ 的)。在反应堆下方和周围有一个环形鼓泡池,设计用于在主反应堆容器严重破裂的情况下冷凝蒸汽。在11年末将1,2,3号区块的反应堆置于“冷停机”状态(即,将反应堆中的乏燃料冷却至100 C及以下)之后,制定了以下任务:- 对难以到达的地方(反应堆容器,容器,泡沫起泡器和其他地方)的辐射情况进行侦察,到2011年底仍不知道这种情况(主要是熔融燃料的残留物)
- 减少反应堆放射性物质的风和水流出-通过消除泄漏(包括臭名昭著的冰墙),对建筑物墙壁的一部分进行镶板,将污染的垃圾收集在尚未完成的容器中
- 4 — , , , —
- (.. . — ,
- () 1,2,3
- - - — “ ”
 从2016年初开始的信息图表。整个计划应该在30至40年内实施,而这里最困难的是从堆满了碎屑的储存池中卸载乏核燃料,并从反应堆容器的残留物中清除皮质激素。目前,SNF已从第4区块完全卸载(幸运的是,它不在反应堆中,而是仅在等待池中-也就是说,第4区块可以很快变成绿色草坪),并且用于卸出保护壳的构造结束了SNF位于第3区块,计划于2017年启动。对于1,2区块,情况最为困难-在这里建造用于SNF清洁的掩体时,首先需要分解碎片并进行部分净化以减少油田,而TEPCO(核电站的所有者)现在正在这样做。
从2016年初开始的信息图表。整个计划应该在30至40年内实施,而这里最困难的是从堆满了碎屑的储存池中卸载乏核燃料,并从反应堆容器的残留物中清除皮质激素。目前,SNF已从第4区块完全卸载(幸运的是,它不在反应堆中,而是仅在等待池中-也就是说,第4区块可以很快变成绿色草坪),并且用于卸出保护壳的构造结束了SNF位于第3区块,计划于2017年启动。对于1,2区块,情况最为困难-在这里建造用于SNF清洁的掩体时,首先需要分解碎片并进行部分净化以减少油田,而TEPCO(核电站的所有者)现在正在这样做。 2016年福岛核电站厂址概况。顺便说一下,有一个很好的计划来解释所有这些坦克和一些建筑物。因此,机器人绝对参与了上述所有工作。是的,当然,这些都是遥控机器,主要是电缆遥控机器,在这里我不会深入探讨术语,将此类设备视为机器人,或者仅是自主设备,我将其称为机器人。
2016年福岛核电站厂址概况。顺便说一下,有一个很好的计划来解释所有这些坦克和一些建筑物。因此,机器人绝对参与了上述所有工作。是的,当然,这些都是遥控机器,主要是电缆遥控机器,在这里我不会深入探讨术语,将此类设备视为机器人,或者仅是自主设备,我将其称为机器人。 iRobot Packbot 510是FAES上使用的第一个。从事故发生的第一天开始,辐射智能一直是一个活跃的问题。东京电力拥有一些iRobot Packbot机器人机群-大型机器,对于此类用途非常方便。他们将剂量计放在pakbots(似乎通常是标准选项之一),伽马相机,压力,温度,湿度传感器上,然后将它们发送到爆炸所摧毁的区域周围。不幸的是,pakbots在楼梯上走动时一切都不好,他们在底楼和街区外进行了侦察。4月,使用iRobot战士机器人在FNPP现场进行了培训。经过一段时间后,他们在FuRO中心和千叶大学共同开发了几台具有类似设计的机器人,包括昆斯,芙蓉,樱花等。确实,这些机器人已经在2011年4月至5月允许侦察木块的上层,其中两个由于电缆断裂而丢失。2011年4月至7月,在福岛核电厂第二单位内进行侦察的木瓜。此外,至少有一架日本军方提供的霍尼韦尔T-HAWK无人机用于空中侦察和监视。军方和其他几种类似Talon的履带机器人也很慷慨。在Packbot意识形态中,这是一个更重,更安全的版本。
iRobot Packbot 510是FAES上使用的第一个。从事故发生的第一天开始,辐射智能一直是一个活跃的问题。东京电力拥有一些iRobot Packbot机器人机群-大型机器,对于此类用途非常方便。他们将剂量计放在pakbots(似乎通常是标准选项之一),伽马相机,压力,温度,湿度传感器上,然后将它们发送到爆炸所摧毁的区域周围。不幸的是,pakbots在楼梯上走动时一切都不好,他们在底楼和街区外进行了侦察。4月,使用iRobot战士机器人在FNPP现场进行了培训。经过一段时间后,他们在FuRO中心和千叶大学共同开发了几台具有类似设计的机器人,包括昆斯,芙蓉,樱花等。确实,这些机器人已经在2011年4月至5月允许侦察木块的上层,其中两个由于电缆断裂而丢失。2011年4月至7月,在福岛核电厂第二单位内进行侦察的木瓜。此外,至少有一架日本军方提供的霍尼韦尔T-HAWK无人机用于空中侦察和监视。军方和其他几种类似Talon的履带机器人也很慷慨。在Packbot意识形态中,这是一个更重,更安全的版本。 除了侦察,在最初的几周内,几乎是为了清除瓦砾,开始使用改型的遥控建筑设备-几台挖掘机,推土机,卡车,成功清除了放射性碎片之间的通道。
除了侦察,在最初的几周内,几乎是为了清除瓦砾,开始使用改型的遥控建筑设备-几台挖掘机,推土机,卡车,成功清除了放射性碎片之间的通道。 2011年5月至6月,第3区块用于清洁放射性废物的机器人。包括核工业的两个传统Brokk'a在Putzmeister机器人混凝土泵上发现了一个有趣的应用程序-从砌块上方倒水,并观察70米吊杆的情况。在安装于工作地点附近的受铅保护的移动室中,对这些机器进行空中管理。
2011年5月至6月,第3区块用于清洁放射性废物的机器人。包括核工业的两个传统Brokk'a在Putzmeister机器人混凝土泵上发现了一个有趣的应用程序-从砌块上方倒水,并观察70米吊杆的情况。在安装于工作地点附近的受铅保护的移动室中,对这些机器进行空中管理。 2011年4月开始,具有62米吊杆的遥控普茨迈斯特(Putzmeister)任务是进行侦察并向被破坏的区块顶部供水。我认为此类设备在FNPP现场的即时出现是由于以下事实:在过去的10年中,增加了从远程控制到工程机械的外部控制的可能性已成为一种流行。本质上完全是电子控制,已经很容易将其带到地球的另一个半球。有了这样的技术,将其挂在摄像机上并配备正确的电信信道就足够了,并且可以使用远程控制的机器人。不幸的是,在1986年,要获得这样的结果,有必要折磨自己,而实际上问题并没有得到解决-消除事故后果的速度比人的剂量负担更为重要。
2011年4月开始,具有62米吊杆的遥控普茨迈斯特(Putzmeister)任务是进行侦察并向被破坏的区块顶部供水。我认为此类设备在FNPP现场的即时出现是由于以下事实:在过去的10年中,增加了从远程控制到工程机械的外部控制的可能性已成为一种流行。本质上完全是电子控制,已经很容易将其带到地球的另一个半球。有了这样的技术,将其挂在摄像机上并配备正确的电信信道就足够了,并且可以使用远程控制的机器人。不幸的是,在1986年,要获得这样的结果,有必要折磨自己,而实际上问题并没有得到解决-消除事故后果的速度比人的剂量负担更为重要。 最后,自2011年以来,FAES站点还使用了核工业标准的抗辐射远程技术:重型(重达一吨以上)BROKK机器人和Walischmiller移动推车机械手-基本上还是在处理放射性废物方面,这是最热的工作。点。奇怪的是,所有这些设备都没有与辐射相关的特定问题-好吧,或者它以某种方式被掩盖了(这是令人怀疑的)。但是,在低空区域(每小时不超过15次X射线)使用不受保护的机器人技术,在更恶劣的条件下,有时会在电子设备上设置铅保护(例如3台Putzmeister遥控混凝土泵,该泵靠近爆炸和从上方倾倒的水所破坏的砖块)
最后,自2011年以来,FAES站点还使用了核工业标准的抗辐射远程技术:重型(重达一吨以上)BROKK机器人和Walischmiller移动推车机械手-基本上还是在处理放射性废物方面,这是最热的工作。点。奇怪的是,所有这些设备都没有与辐射相关的特定问题-好吧,或者它以某种方式被掩盖了(这是令人怀疑的)。但是,在低空区域(每小时不超过15次X射线)使用不受保护的机器人技术,在更恶劣的条件下,有时会在电子设备上设置铅保护(例如3台Putzmeister遥控混凝土泵,该泵靠近爆炸和从上方倾倒的水所破坏的砖块) 2011年3月23日的辐射情况-事故活跃阶段结束后的一周。 130 mSv的最大数字为13 R / h,而5月6日在切尔诺贝利核电站的〜1000 R / h。但是,这里应注意一个重要点。没有将串行或半串行设备发送到反应堆容器或容器底部,随后在该容器中测量了高达50,000 r / h的场。对于此类任务以及其他特定任务,例如大体积净化,水下侦察,从乏燃料存储池中清除碎屑,日本公司自2011年以来一直领导着各种机制的开发,其中许多机制直到今天才投入使用。让我们看看它们:
2011年3月23日的辐射情况-事故活跃阶段结束后的一周。 130 mSv的最大数字为13 R / h,而5月6日在切尔诺贝利核电站的〜1000 R / h。但是,这里应注意一个重要点。没有将串行或半串行设备发送到反应堆容器或容器底部,随后在该容器中测量了高达50,000 r / h的场。对于此类任务以及其他特定任务,例如大体积净化,水下侦察,从乏燃料存储池中清除碎屑,日本公司自2011年以来一直领导着各种机制的开发,其中许多机制直到今天才投入使用。让我们看看它们: 测量跑步机和FRIGO-MA让我们从Pakbot运动学的更紧凑版本开始-TOPY的测量跑步机。但是,2012年并不是一个非常有趣的机器人爬入地下室的地下室。该方案的一个甚至更小的版本称为FRIGO-MA,以及一个来自东芝的奇怪的四足机器人,它可以产生一个独立的平面侦察机,用于控制反应堆管道的管道泄漏(很长时间以来,寻找冷却水泄漏的位置对于清盘人来说非常重要)。东芝开发了一种更小,更坚固的侦察员蝎子-该机器人走进了起泡器和容器反应器(似乎其中一只蝎子成为了最早被媒体复制的机器人)。在内容块2的布局上测试“蝎子”。有趣的是,构建了许多不同的模型来发送机器人,这些机器人相当可靠地复制了核电站设计的许多元素。顺便提一下小侦察兵的问题。我喜欢这个机器人的照片-猜猜是什么用作相机
测量跑步机和FRIGO-MA让我们从Pakbot运动学的更紧凑版本开始-TOPY的测量跑步机。但是,2012年并不是一个非常有趣的机器人爬入地下室的地下室。该方案的一个甚至更小的版本称为FRIGO-MA,以及一个来自东芝的奇怪的四足机器人,它可以产生一个独立的平面侦察机,用于控制反应堆管道的管道泄漏(很长时间以来,寻找冷却水泄漏的位置对于清盘人来说非常重要)。东芝开发了一种更小,更坚固的侦察员蝎子-该机器人走进了起泡器和容器反应器(似乎其中一只蝎子成为了最早被媒体复制的机器人)。在内容块2的布局上测试“蝎子”。有趣的是,构建了许多不同的模型来发送机器人,这些机器人相当可靠地复制了核电站设计的许多元素。顺便提一下小侦察兵的问题。我喜欢这个机器人的照片-猜猜是什么用作相机 东芝蝎子的竞争对手是日立公司的Shape-changer,这是一款相当有趣的运动设计。将两个此版本的机器人发送到容器的下部,在〜500 r / h(5 Sv / h)的田野中进行侦察,并发现那里喷出了皮质喷雾。
东芝蝎子的竞争对手是日立公司的Shape-changer,这是一款相当有趣的运动设计。将两个此版本的机器人发送到容器的下部,在〜500 r / h(5 Sv / h)的田野中进行侦察,并发现那里喷出了皮质喷雾。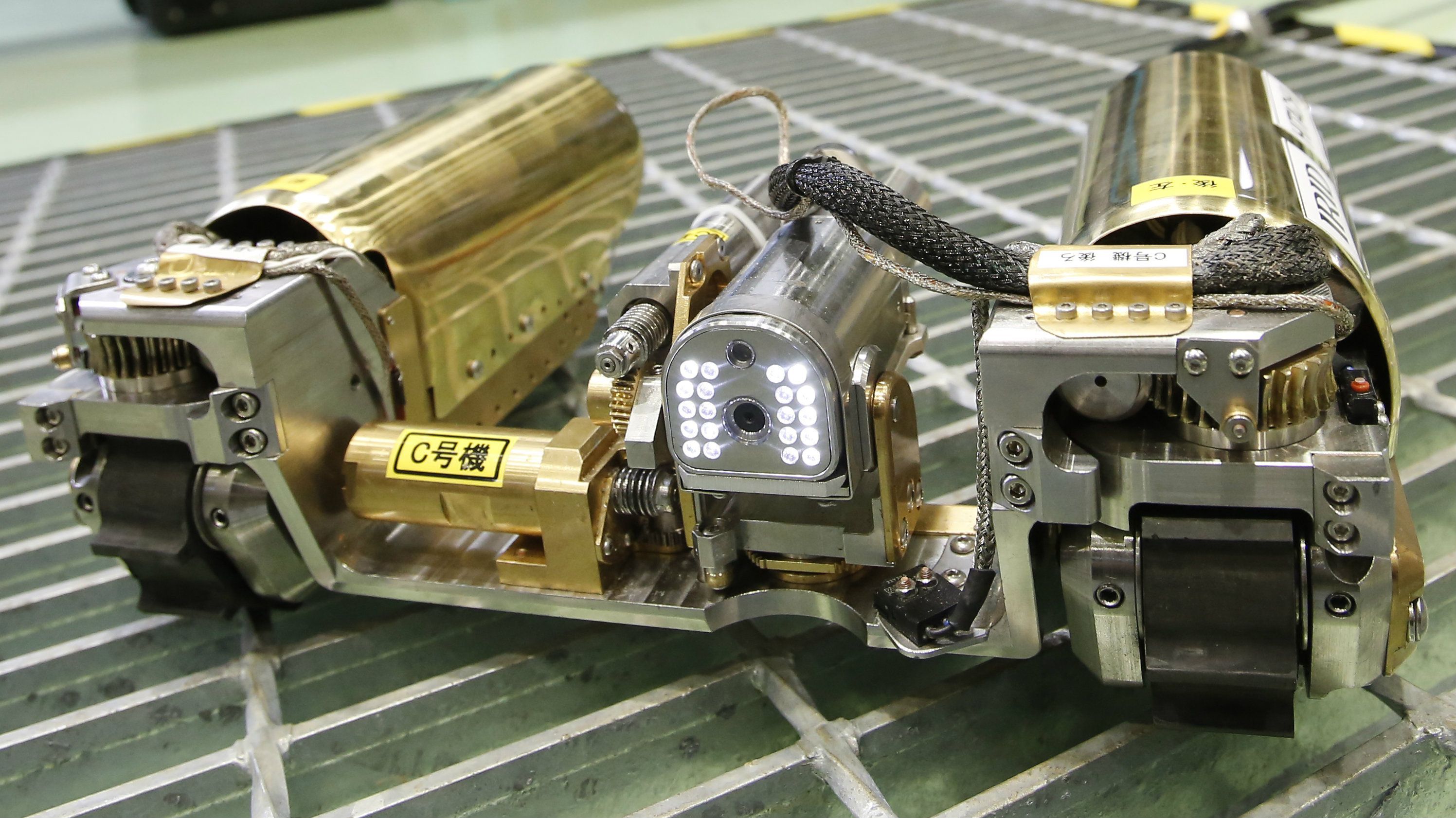
 是他们成为去年新闻“ TEPCO将机器人送入反应堆,他们死于辐射”的英雄-实际上,第一个机器人刚刚被卡住,但是第二个确实遇到了一块SNF,其工作范围为5000-8000 r / h,电子设备拒绝了(具有讽刺意味的是,命运中的“保持自觉”一词与人非常相似)。顺便说一句,尽管死亡,但这些机器人还是发现了一件相当重要的事情-在单元1的集装箱中,水位很高,这意味着水很紧。由这些侦察员之一拍摄的视频。但是,与人不同,工程师有机会面对问题,尝试通过发明新的选项来解决问题。现在,东芝正在测试相同的小型天蝎座侦察兵的版本,该侦察兵配备有微分支和微刀,用于推动皮质骨。一般而言,新车越来越靠近主要的未勘探区域-反应堆容器和容器的真皮的渗透位置,并在1,2,3区块中绘制反应堆下方的真皮位置。目前,在非远程方法中,TEPCO仅设法将2号区块的防辐射相机降低到了皮质,并以530 Sv / h(即53000 r / h)的速度测量了DER。这样的剂量率使我们无法期望侦察/制图任务会很简单-在这种情况下,现有的甚至抗辐射的电子设备也变得过于不可靠,并且无法在小型机器人中屏蔽它。顺便说一下,在国际热核实验堆(ITER)的框架内,针对这种工作条件,欧洲正在开发一系列防辐射微电路(ADC,DAC,数字接口,逻辑)。“一文不值”的项目如何带来具体成果的另一个例子。作为侦察的主题,应该提到的是,东京电力公司使用了几台串行自主水下机器人和一艘小型遥控船来侦查充满水的地下室。TEPCO机器人大军的第二项主要任务是并且现在主要是在去除SNF的框架内分析堵塞情况。正如我在上面所写,FAEC最初将BROKK和Walischmiller标准产品用于核工业和遥控建筑设备。但是,日立很快开发了一种类似BROKK的特殊(即具有来自内燃机的自主动力的重型履带机器人)ASTACO-SoRa机器人。以ASTACO-SoRa为幌子,从日本动漫的图像中发现了一些东西。他的任务是拆除电缆碎片,这是标准拆卸机械臂的复杂对象,通常在核电站中可以找到。除使用特殊的ASTACO-SoRa和耐辐射的BROKK外,还使用了Husqvarna拆装机器人DXR-140,DX-250和DX-310。您怎么不知道husqvarna会产生驱逐舰?
是他们成为去年新闻“ TEPCO将机器人送入反应堆,他们死于辐射”的英雄-实际上,第一个机器人刚刚被卡住,但是第二个确实遇到了一块SNF,其工作范围为5000-8000 r / h,电子设备拒绝了(具有讽刺意味的是,命运中的“保持自觉”一词与人非常相似)。顺便说一句,尽管死亡,但这些机器人还是发现了一件相当重要的事情-在单元1的集装箱中,水位很高,这意味着水很紧。由这些侦察员之一拍摄的视频。但是,与人不同,工程师有机会面对问题,尝试通过发明新的选项来解决问题。现在,东芝正在测试相同的小型天蝎座侦察兵的版本,该侦察兵配备有微分支和微刀,用于推动皮质骨。一般而言,新车越来越靠近主要的未勘探区域-反应堆容器和容器的真皮的渗透位置,并在1,2,3区块中绘制反应堆下方的真皮位置。目前,在非远程方法中,TEPCO仅设法将2号区块的防辐射相机降低到了皮质,并以530 Sv / h(即53000 r / h)的速度测量了DER。这样的剂量率使我们无法期望侦察/制图任务会很简单-在这种情况下,现有的甚至抗辐射的电子设备也变得过于不可靠,并且无法在小型机器人中屏蔽它。顺便说一下,在国际热核实验堆(ITER)的框架内,针对这种工作条件,欧洲正在开发一系列防辐射微电路(ADC,DAC,数字接口,逻辑)。“一文不值”的项目如何带来具体成果的另一个例子。作为侦察的主题,应该提到的是,东京电力公司使用了几台串行自主水下机器人和一艘小型遥控船来侦查充满水的地下室。TEPCO机器人大军的第二项主要任务是并且现在主要是在去除SNF的框架内分析堵塞情况。正如我在上面所写,FAEC最初将BROKK和Walischmiller标准产品用于核工业和遥控建筑设备。但是,日立很快开发了一种类似BROKK的特殊(即具有来自内燃机的自主动力的重型履带机器人)ASTACO-SoRa机器人。以ASTACO-SoRa为幌子,从日本动漫的图像中发现了一些东西。他的任务是拆除电缆碎片,这是标准拆卸机械臂的复杂对象,通常在核电站中可以找到。除使用特殊的ASTACO-SoRa和耐辐射的BROKK外,还使用了Husqvarna拆装机器人DXR-140,DX-250和DX-310。您怎么不知道husqvarna会产生驱逐舰? 于2012年在福岛核电站接受Husqvarn的验收。为什么需要这样的设备?让我提醒您,在当今的主要事件的框架中,即从存储池中提取乏核燃料,有必要分解池周围的碎屑,建造庇护所并进行总体准备。而且并非所有地方的辐射环境都允许人们这样做,因此尽管工作步伐正在大大下降,但将这些任务大量转移到拆卸机器人上是可以理解的。
于2012年在福岛核电站接受Husqvarn的验收。为什么需要这样的设备?让我提醒您,在当今的主要事件的框架中,即从存储池中提取乏核燃料,有必要分解池周围的碎屑,建造庇护所并进行总体准备。而且并非所有地方的辐射环境都允许人们这样做,因此尽管工作步伐正在大大下降,但将这些任务大量转移到拆卸机器人上是可以理解的。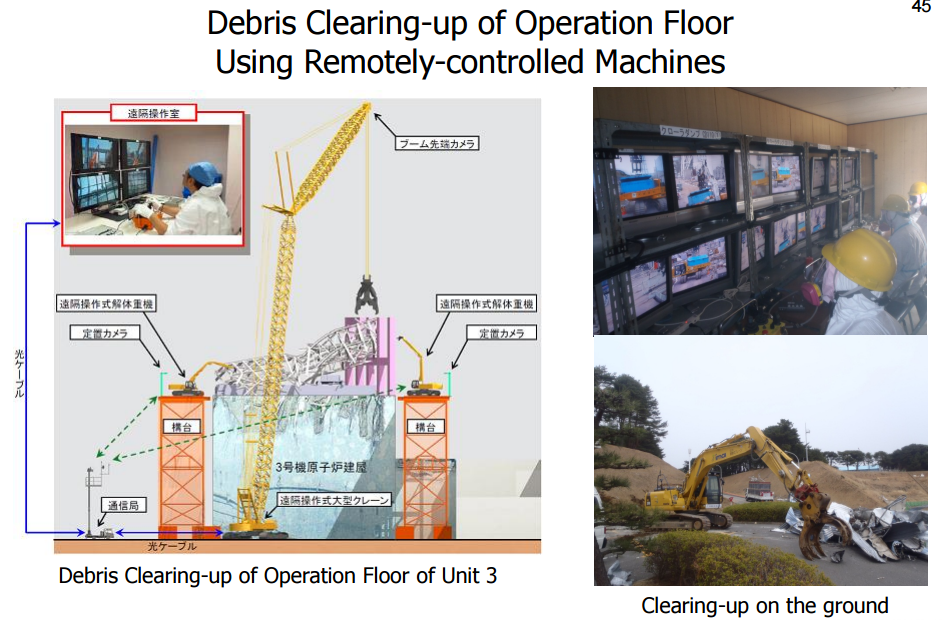 同样,在这项任务中,与各种笨拙且缓慢的机器人一起,遥控建筑设备也在工作。顺便说一下,关于节奏,有点离题。 1986年,机器人移动得更慢,精度和可靠性甚至更低,每天由于切尔诺贝利核电厂4屋顶上的SNF埋葬而造成的延迟每天都导致通过风和水额外清除了放射性核素。因此,切尔诺贝利事故的清盘人试图用机器人来完成清洁任务,并确保它太慢,使人们重新实现了这一任务。正如那些机器人的开发者喜欢说的那样,机器人技术的缓慢和不可靠成为其使用量少的主要原因,而不是辐射和“恶劣条件”。作为证明,我将提供一段纪录片视频:但是回到福岛。除了拆除瓦砾并将固体放射性废物运到受污染块上的容器中外,还有(也是)另一项令人不愉快的任务-对墙壁,地板,天花板等进行净化-所有不能简单地从以后的工作地点移除的结构元素。在事故活跃阶段抛出的放射性核素落在这些表面上-可以冲洗掉的地方,需要剥离的地方。一个很好的选择是喷砂-用干冰颗粒(来自二氧化碳)轰击表面,然后将所有发生的事情吸到过滤器上。但是,这种清洁系统本身很麻烦-首先,他们试图将其安装在重量为985千克的同一Husqvarna DXR-140上,但是效果不是很好。但是我们在日本!奇怪的机器人的故乡!结果超出了所有预期。机器人列车由四个推车组成,其中第一个装有去污操纵器,其余的则装有干冰产生系统,真空吸尘器,过滤器和各种清洁液等。通常,为净化任务创建了大约十二种专门机制,包括 最容易清洁地板,最不容易清洁天花板。同时,据您了解,不是测试的结果,而是在块上进行的实际工作仍然相当有限,并且更像是相同的测试,仅在现实世界中。其中包括上面显示的巨型机器人列车(尚未出现)。去污技术-安装在遥控伸缩梯末端的机械手?
同样,在这项任务中,与各种笨拙且缓慢的机器人一起,遥控建筑设备也在工作。顺便说一下,关于节奏,有点离题。 1986年,机器人移动得更慢,精度和可靠性甚至更低,每天由于切尔诺贝利核电厂4屋顶上的SNF埋葬而造成的延迟每天都导致通过风和水额外清除了放射性核素。因此,切尔诺贝利事故的清盘人试图用机器人来完成清洁任务,并确保它太慢,使人们重新实现了这一任务。正如那些机器人的开发者喜欢说的那样,机器人技术的缓慢和不可靠成为其使用量少的主要原因,而不是辐射和“恶劣条件”。作为证明,我将提供一段纪录片视频:但是回到福岛。除了拆除瓦砾并将固体放射性废物运到受污染块上的容器中外,还有(也是)另一项令人不愉快的任务-对墙壁,地板,天花板等进行净化-所有不能简单地从以后的工作地点移除的结构元素。在事故活跃阶段抛出的放射性核素落在这些表面上-可以冲洗掉的地方,需要剥离的地方。一个很好的选择是喷砂-用干冰颗粒(来自二氧化碳)轰击表面,然后将所有发生的事情吸到过滤器上。但是,这种清洁系统本身很麻烦-首先,他们试图将其安装在重量为985千克的同一Husqvarna DXR-140上,但是效果不是很好。但是我们在日本!奇怪的机器人的故乡!结果超出了所有预期。机器人列车由四个推车组成,其中第一个装有去污操纵器,其余的则装有干冰产生系统,真空吸尘器,过滤器和各种清洁液等。通常,为净化任务创建了大约十二种专门机制,包括 最容易清洁地板,最不容易清洁天花板。同时,据您了解,不是测试的结果,而是在块上进行的实际工作仍然相当有限,并且更像是相同的测试,仅在现实世界中。其中包括上面显示的巨型机器人列车(尚未出现)。去污技术-安装在遥控伸缩梯末端的机械手?
另一个奇怪的去污机的例子。最后,日本人设计遥控机器人的最后一个最重要的任务是清理曝光池。此任务最困难,因为在这里,除了泥泞的水中不稳定的结构外,还必须处理较大的辐射场(尤其是从装有乏核燃料的架子上捡拾垃圾)和发生连锁反应的危险-例如,如果将一个燃料组件放到另一个燃料组件上,则很有可能。水下车辆在第三个街区的曝光池中拍摄的视频。在这个垃圾下有几百吨乏燃料!为了解决该问题,由水下遥控机器人创建了一个相当大的建筑群,该机器人具有两个悬吊在高架起重机上的操纵器和各种提升装置。 TEPCO计划在2017年开始使用该综合设施,当时在第三台机组清除乏燃料,SNF将于2018年开始卸载。总而言之,我想指出以下几点:1.在福岛核电站的事故后果清理工作已经成为大量使用遥控设备的场所,主要用于侦察和制图任务。2.现有的串行机器人无法应对清算本身(以及在困难地方进行侦察)的任务。事故发生后的两三年中,开发了许多新的设备变型-显然,正在寻找在工业设施中发生辐射事故的情况下成功且有效的工作形式。顺便说一句,我总共算出了43种属于TEPCO报告框架的遥控汽车。3.远程控制机器的工作要比在人工帮助下慢得多。这是一个众所周知的问题,既与机器人本身的运动学和移动性缺陷有关,也与操作员通过单独的摄像头感知情况的难度有关:今天,他们正在尝试借助增强和虚拟现实解决第二个问题,但是这种时髦的钟声还没有达到FAES(但在大学的发展中得到了积极的应用)。附注:由于某些原因,我不明白,如果有人可以提供建议,某些视频将无法使用-请提供建议。 Source: https://habr.com/ru/post/zh-CN401239/
All Articles