蝙蝠在几乎完全黑暗的环境中飞行,执行复杂动作,使科学家感到惊讶和困惑的能力已有数百年之久。 直到最近,专家们才发现蝙蝠为何可以在没有视觉器官帮助的情况下在太空中航行。 尽管如此,专家们不仅钦佩这些动物的航行能力,而且钦佩其飞行技巧。
鼠标安静,快速地飞行,几乎可以立即改变方向。 如果可以由人类创造出这样的东西,那么科学技术将付出很多。 工程师和科学家长期以来一直在研究这些动物的飞行机制,试图重现鼠标的飞行机制。 有人成功。
前几天,加州理工学院的科学家
介绍了他们的机器人 Bat Bot(B2),
该机器人配备了柔软的复合材料机翼,在骨架之间具有隔膜。 该项目的加州理工学院合作伙伴是来自伊利诺伊大学厄本那-香槟分校(UIUC,伊利诺伊大学厄本那-香槟分校)的专家团队。 “该机器人的设计将帮助我们制造出更高效,更安全的无人机,还可以帮助我们找出蝙蝠的飞行方式,”项目参与者之一
Soon-Jo Chung说。
加入加州理工学院团队的Chung与蝙蝠机器人及其前任主管Alireza Ramezani和伊利诺伊大学厄本那-香槟分校的教授Seth Hutchinson一起开发了蝙蝠机器人。
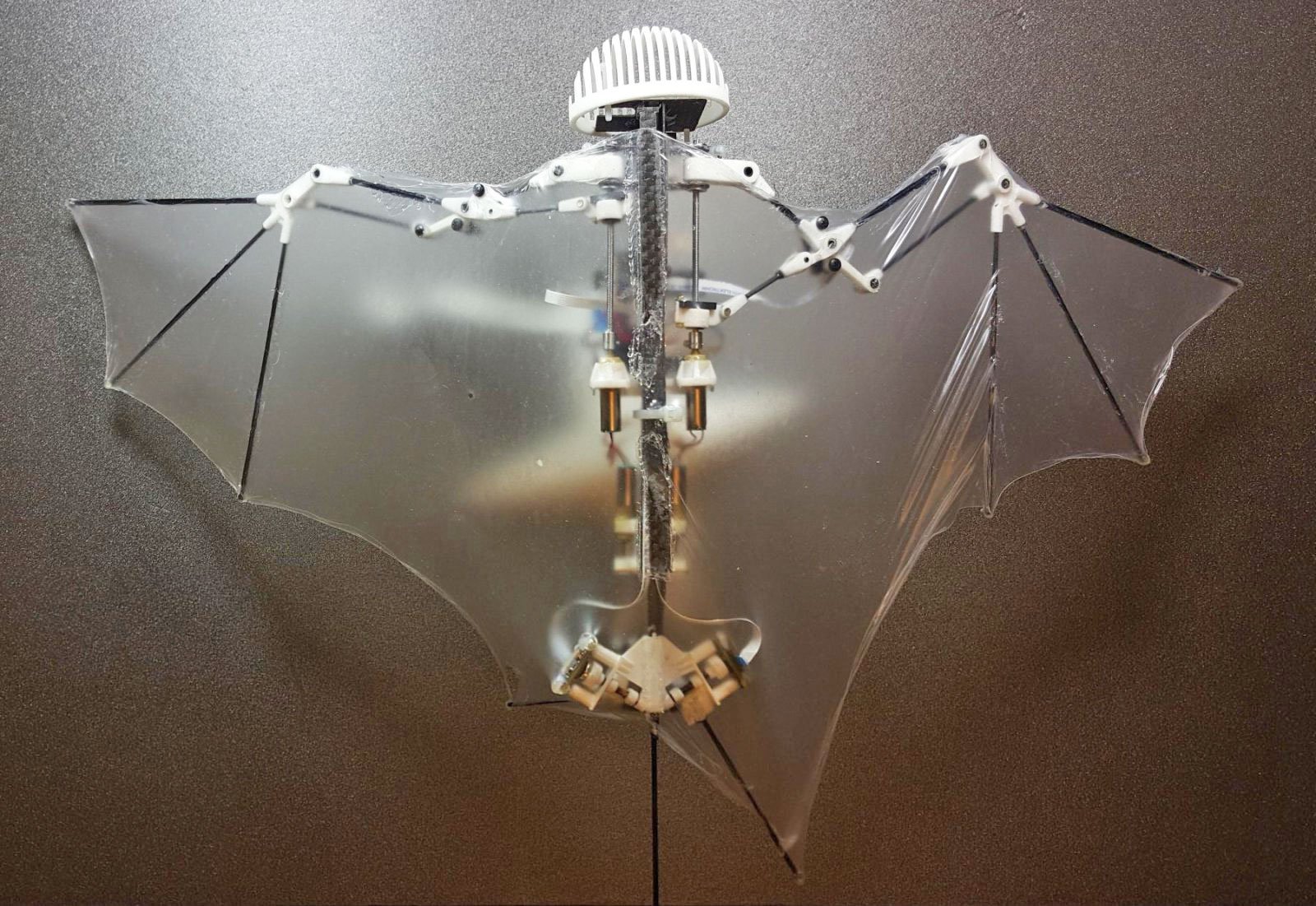
机器人的重量仅为93克。 从外观上看,它类似于蝙蝠,其外观和设计均与之类似。 翼展只有30厘米。 飞行期间,系统可以通过折叠或展开“手指”来改变机翼的形状,从而改变手腕,腿和肩膀的形状和位置。 专家认为,蝙蝠是可以飞行的最多(如果不是最多)复杂组织的动物之一。 蝙蝠的翅膀可以改变形状,飞行机制涉及使用几种类型的关节,这些关节可以固定骨骼和肌肉,或者相反,可以增加构成骨骼翅膀的自由度。
蝙蝠的飞行原理与鸟类的飞行原理
有很大的不同,其主要特征是蝙蝠的机翼的柔韧性和柔韧性。 当将蝙蝠与鸟类相比较时,机翼在向下运动时的强烈弯曲会产生更大的升力,并降低能源成本。 在飞行过程中,在机翼向下运动的过程中,在其前缘附近形成了湍流,据科学家称,这提供了机翼升力的40%。 气流从机翼的前缘开始,然后绕过气流,并在机翼向上反向运动期间再次返回。 由于机翼的灵活性,所有这些都成为可能,因为它的弯曲使您能够将旋流保持在机翼表面附近。
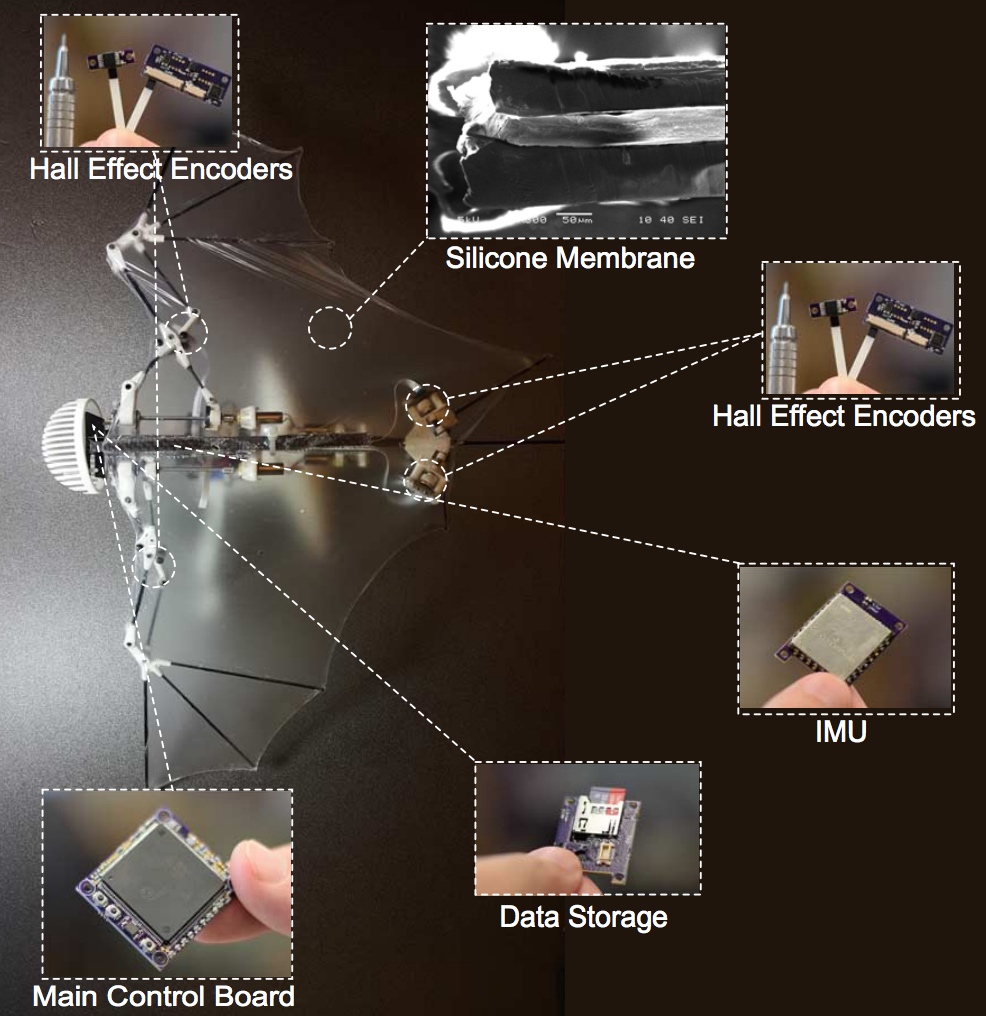 为了使机器人飞行,开发人员创建了一个复杂的硬件-软件系统。 无人机在飞行过程中收集的环境数据将得到实时处理。 监控软件接收该数据并协调无人机的工作。 所有这些都可以离线运行,而无需操作员干预。
为了使机器人飞行,开发人员创建了一个复杂的硬件-软件系统。 无人机在飞行过程中收集的环境数据将得到实时处理。 监控软件接收该数据并协调无人机的工作。 所有这些都可以离线运行,而无需操作员干预。蝙蝠翅膀的肌肉骨骼系统可以在各个方向上进行40多次运动。 Ramezani说:“我们的工作结果是目前根据蝙蝠的形态设计机器人机翼的最先进的方法之一,而且该机器人可以脱机飞行。” 当然,这个机器人离真正的蝙蝠还有很长的路要走,它可以在空中飞越昆虫,飞来飞去,抓住它并吃掉它。 尽管相当接近,但这种机动性仍是未来的问题。
实际上,机器人的机翼可以按照“原型”所有者的相同方式改变形状。 制作这种类型的机翼是非常困难的,为此,有必要了解蝙蝠的肌肉骨骼系统结构的解剖特征。 作为皮肤材料的替代品,工程师创造了厚度仅为56微米的薄膜,该薄膜的基础是硅树脂。 这种材料可以拉伸和收缩,几乎与适合蝙蝠翅膀的皮肤一样。
根据开发商的说法,飞行机器人蝙蝠比传统飞机具有更高的能源效率。 这种类型的机器人可以替代无人机。 而且,与大多数无人机不同,人造蝙蝠将能够迅速改变飞行方向。 此外,它们对人类的危害(就伤害的可能性而言)将不如同一架直升机。