
在本文中,我们考虑了新型直升机Geoscan Pioneer的电子部分,该电子部分旨在教授机器人技术。 我们将讨论创建直升机,或更确切地说,我们获得了什么经验以及我们对该项目进行了哪些更改。 最后-分享未来计划。
1.为什么创建用于在Geoscan中训练的直升机
为了解决许多应用问题,越来越多地使用无人飞行器(UAV),特别是多旋翼系统。 它们的存在可在许多领域看到,例如,航空摄影,货物运输,空中视频拍摄,物体监控以及比赛(无人驾驶比赛)。
然而,在迅速发展的无人飞机产业中,专业人员短缺。 技术人员最好从学校开始就做好准备。 只有过去的所有阶段:从设计到运营以及现代化,才能成为该领域的真正专业人士,并在技术上以及涉及越来越多的行业相关领域并解决越来越多的应用问题方面,为行业发展提供新一轮的发展。
可以说,学童,学生和业余爱好者使用直升机作为飞行机器人来学习无人机的开发,操作和现代化的基础知识对我们来说是一个有趣的话题。 结果,这可以导致建立新的教育标准的基础。
我们认为以下主题是最有趣的研究:
对控制系统进行
编程 ,在空间中创建方向和导航算法,识别环境;
电子 -连接传感器并研究其工作原理,研究飞机系统的结构;
框架和力学
设计 ,以及为解决不同问题而优化飞行模式的直升机机电参数的研究;
在飞行员模式和无人机操作员模式下
对直升机的
控制 。 即,手动或自动。
因此,正在形成许多有趣的任务,这些任务可以留给教育界,竞赛和奥林匹克竞赛框架内的年轻一代解决。
基于上述内容和在Geoscan创建无人机的现有经验,我们决定通过创建软件和电子平台将这些想法付诸实践。
值得注意的是,为了简单地为飞行机器人编程,您需要导航系统。 如果在街上通过使用卫星导航解决了这个问题,那么在室内这个问题就没有一个明确的解决方案。 考虑到由于天气,周围地形或安全原因,在街上工作总是不可能的,因此室内导航已成为必须。 下面将介绍我们选择的导航系统。
2.“学校”直升机电子设备的第一个版本
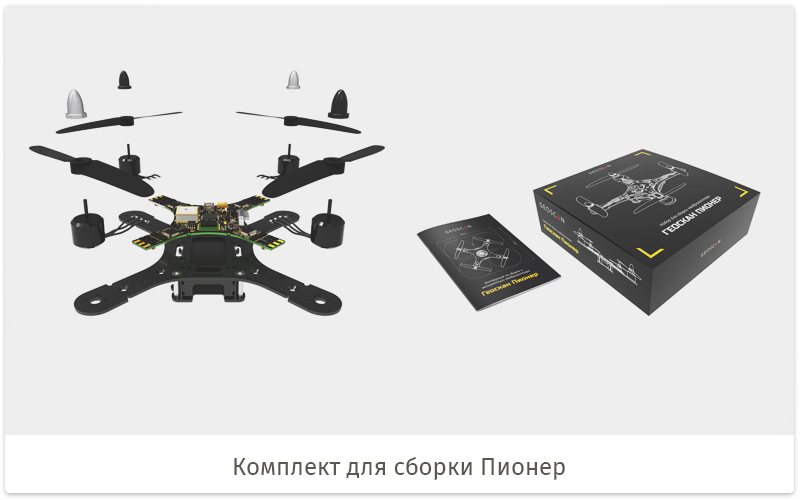
为了制造小型直升机,必须将电子设备的质量和尺寸减小到最小。 为此,采用包含自动驾驶仪(AP)的单板解决方案是合乎逻辑的,该解决方案具有传感器,电机控制器,无线电通讯,电源和必要的连接器。 “单板”简化了电子设备与框架的组合,并将电线数量减少到最少。
与无刷电动机相比,无刷电动机具有许多优点。 这样的电机效率更高,更可靠,并且相对轻量的大扭矩使您可以放弃在螺丝上使用齿轮箱。 一定的困难是用于无刷电动机的速度控制器的开发。 但是,由于开发了“成人”无人机的经验,这并不是一个大问题。 在选定的螺旋桨-马达组的缺点中,只有马达和调节器的成本可以被记录下来,但这可以通过飞行时间,直升机良好的速度特性,移动较大有效载荷的能力来证明是合理的,并且也不必担心购买和更换有故障的马达。
因此,我们着手为小型直升机创建原型板。 我们不会对该板进行过多的关注,而仅注意其主要缺点,这些缺点不少,主要是由于三个星期的开发时间非常短。
在最初的设计中,我想尝试使用直升机的最大功能,因此将磁力计和卫星导航模块放置在板上,由于与板的电磁兼容性不足,因此无法正常工作。 磁力计离电源线太近,当电流流过导线时,磁力计给出了错误的信息。 由于陶瓷天线的屏幕面积不足,GPS接收器发现导航用卫星数量不足。
为了方便将直升机连接到计算机,使用了Wi-Fi调制解调器。 如果应该在嘈杂的环境中使用此接口进行遥测和控制,则该问题会很麻烦,例如在展览会或其他公共活动中,那里有许多2.4 GHz的设备。 此外,模块显示网络运行不稳定。

从操作的角度来看,一切都还不太顺利。 首先,电动机的相线必须焊接到板上,因为它们没有连接器。 困难在于需要具有使用烙铁工作的技能,并且需要混合电线的顺序,这会导致电机旋转方向错误,并且使组装和拆卸变得复杂。 其次,不可能在板上制作方便的安装孔,这不利地影响了将板固定到框架的可靠性和实用性。 第三,间距为2 mm的标准“针脚”形式的接口连接器在连接多个设备时并不总是方便使用。
除其他因素外,由于元件的一侧安装(除底部的调节器元件数量少),电路板的尺寸比预期的要大。

然而,直升机竟然是工人。 固件自动驾驶仪和调节器是从我们的
“大型”直升机上转移
过来的 。 在略微调整了控制环的系数之后,我们使直升机在完成其主要任务-飞行方面做得非常出色。 使用1306 3100 kV电机,5英寸的螺钉和一块LiPo 2s 1300 mAh电池,直升机飞行15-16分钟,使用GoPro3(80 g)-大约需要10分钟。
在
Marvelmind的超声(US)导航系统中实施了一次飞行。 该系统由两种类型的超声波信标组成:固定式和移动式。 同时,安装在直升机上的系统的移动信标以足够低的精度(±5-10 cm)向自动驾驶仪发出3个位置坐标,我们创建的控制系统将该数据与陀螺仪和加速度计的数据结合起来,并控制直升机的空间位置。
3.创建新版本的想法
在采用新版开发板时,对我们来说很明显,需要进行一些改进。 随着对直升机使用领域和方法的全面了解,我们对项目的概念进行了更详细的考虑。 主要思想是决定仅将必要的组件留在板上,并制成一种“主板”,指定直升机功能目的的模块将与该主板相连。 这种模块的一个例子是带有指南针的卫星接收器,用于街道导航。
现在,新板包含带有传感器的主AP控制器-加速度计,陀螺仪和气压计。 高度保持模式需要气压计,这可以通过手动控制大大简化直升机的控制。 为了存储飞行日志和自动驾驶仪参数,我们使用了单独的闪存芯片。
板上和扩展模块上的所有电子组件均由三个电压转换器供电:5 V(用于模块,LED,PPM / SBUS接收器),3.3 V(用于板上的模块和微电路)和另一个3.3 V(分别用于传感器)。 输入电压为6 V至14 V,对应于具有两到三个“电池组”(2s-3s)的锂聚合物电池。

通过无线电通道或USB与PC进行通信。 为了减少开发时间,我们使用了功率为25 mW的现成的868 MHz
Radiocraft无线电模块。
无线电模块在板上配备有芯片天线,以及用于连接外部天线的连接器。 但是,要使用外部天线连接器,必须使用烙铁。 假设芯片用户将拥有足够的芯片天线。 要将PC通过无线电连接到直升机,您需要使用套件中提供的双向USB调制解调器。

WS2812B RGB控制的LED充当各种事件的指示器。 除了板上的LED之外,还可以连接其他LED。

电动机速度控制器能够承受20 A的电流并具有主动制动的能力,这对直升机的控制动力学有积极影响。
电源电压在2s-3s锂电池内。 调节器通过UART而不是通过PWM信号连接到AP。 这对抗干扰性有很好的效果。 与第一版相比,调节器的尺寸减小了,这是因为电子组件的外壳更加紧凑。 另外,我们进行了组件的双向安装,这也使我们能够减小电路板的尺寸。

现在,板上有“人为”安装孔,可轻松安装到框架。
还有更多有用的连接器。 现在,您无需将电动机的导线焊接到板上。 扩展模块通过板顶部的两个连接器连接,由于引脚数和连接器本身的设计不同,您不能混淆模块的位置。
选择TE Micro-MaTch连接器可防止机械损坏。 与2.54 mm的引脚不同,如果掉落或处理不当,它们不那么容易损坏。 您也可以通过延长电缆连接模块,以允许在直升飞机上进行模块安装。 以下接口连接到这些连接器:UART,SPI,I2C,多个GPIO,用于连接其他受控LED的信号以及3.3 V和5 V的电源。接口的逻辑电平默认为3.3 V,但可以根据需要更改为5 V.
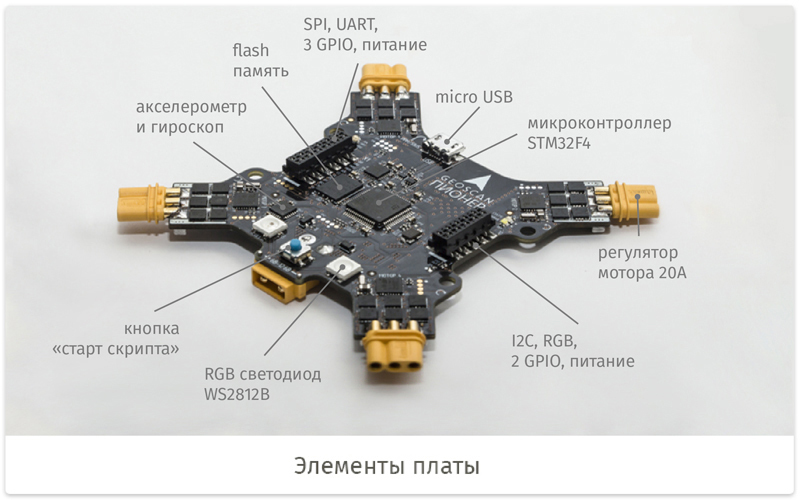
该按钮由用户编程或默认情况下用于运行脚本。
关于平台的软件组件的一些知识。 STM32F4自动驾驶仪微控制器固件使用C ++编写,并在RTOS
NuttX上运行。 固件已关闭,但用户可以用脚本语言
Lua编写其代码。
通常,我们从以下几种脚本语言中进行选择:Python,JavaScript(
IoT.js )和Lua。 由于MK太大,难以在MK下使用标准Python实现。 我们考虑了MicroPython的选项,但由于直接访问汇编器指令的可能性而无法解决。 而且我们不希望普通用户访问它们。 JavaScript具有冗余功能,并且为了消除多余的功能,必须正常工作。 Lua是一种非常流行的语言,可以使用C ++轻松扩展,并且具有适合我们的实现。
该脚本可以包含控制算法,也可以仅包含一系列动作,从传感器接收和处理数据,有效负载管理等。通常,提供了与飞行机器人的多种交互功能,可用于研究,竞赛或业余任务。 可以使用特殊的应用程序编写脚本并将其上传到直升机,但是您也可以使用
Google Blockly生成代码。
您可以通过USB线或无线电频道下载脚本。 PC上的应用程序显示遥测信息,使您可以判断直升机的状态。 当然,还有机器人的控件和设置。
目前,车架是由碳纤维或玻璃纤维通过铣削板制成的。 它由少量零件组装而成,并具有电池盒。
(可选)您可以放置机箱和螺钉保护。 现在正在开发由塑料制成的框架,该框架将使用注射技术制造。

4.我们通过模块扩展功能
如上所述,该板具有使用插件进行扩展的能力。 主要模块如下:
导航模块是其自身的室内超声定位系统的接收器。
 GPS模块
GPS模块 -街道上的卫星定位。 船上还装有磁力计,用于航向定向。
 ToF模块
ToF模块 -从多个指向不同方向的
ToF距离传感器接收信息,从而可以检测障碍物。
 负载模块
负载模块 -配备电磁负载捕获和LED,用于指示和照明效果。
 Marvelmind模块
Marvelmind模块是Marvelmind定位系统的适配器。
 OpenMV模块
OpenMV模块是用于计算机视觉
OpenMV的摄像机的适配器。
声纳模块 -提供使用超声波传感器获取高度的功能。
WiFi模块 -添加WiFi接口。
蓝牙模块 -添加蓝牙接口。
当然,我们计划将来创建许多其他模块。
5.实际应用和未来计划
促销视频Geoscan Pioneer我们向多家教育机构交付了《先锋》的数本产品。 它们是在董事会的第一个版本的基础上制作的,因此交付实际上具有更多的实验性。 不过,这架直升机非常适合担任装配设计师和教授驾驶技能。
在
Aeronet 2016会议期间,先驱者参加了在Alferievo举行的试点比赛。
飞行机器人先锋在
Robofiniste机器人技术节上如何引起关注。 进行了一次八次飞行的测试,实际上,这架直升机成功地应对了。 该系统在通过超声波导航的基础上工作。

搭建了一个带有网格的框架的安全空间平台,节日的所有访客都有机会控制直升机。 同时,控制系统不允许将直升机带出允许区域。
今天,我们正在生产第一批先锋产品,我们正在开发新的扩展模块,我们正在设计用于模制的塑料框架,并且正在完成超声波导航系统的创建。 我们也计划介绍先锋。 您可以在Geoscan网站上找到有关时间和地点的信息。