 这三个机器人是Astrobee的前身。 他们在ISS上通过了一些测试,但对一个人没有帮助。
这三个机器人是Astrobee的前身。 他们在ISS上通过了一些测试,但对一个人没有帮助。自2006年以来,NASA就一直在国际空间站上使用机器人。 十多年来,各种系统已在ISS上进行了测试。 最不寻常的项目之一是SPHERES(同步定位保持,参与,重定向,实验卫星)。 作为该项目的一部分,NASA测试了三台机器人,这些机器人在该站花费了600多个小时。 在这段时间内,工程师和科学家能够进行大量实验,包括在独立操作,地图绘制和导航中的机器人交互。 同时,这些机器人的设计宗旨是不进行任何有助于宇航员的实际工作。
现在,新一代机器人可以为ISS上的人员提供直接帮助的时候到了。 这样的机器人就是
Astrobee 。 他可以承担宇航员的例行任务,包括分析空气质量,确定噪音水平以及通过麦克风和摄像头中继电台的声音。 此外,该机器人配备了RFID扫描仪,它可以使用一些工具,并使用小型操纵器对其进行操作。
秋天,NASA在
NASA的一个
研究中心展示了其机器人的功能。 它的功能看起来并不令人印象深刻。 实际上,机器人是一个面长为32厘米的立方体。 主体由弹性材料制成。 内部是微型反应系统,可让机器人移动。 另外,在壳体中放置了大量的传感器,控制系统,触摸屏以及用于添加各种硬件的几个附加的自由连接器,包括上述操纵器臂。
为了测试机器人反应系统的功能,将Astrobee放在了类似于雪橇的底座上。 这些雪橇依次位于非常光滑的花岗岩立方体的其中一个表面上。 使用压缩二氧化碳的压缩射流,系统可以轻松地在表面上滑动。 因此,开发人员可以测试导航和反应系统,并在必要时调整各种元素。 在太空中,由于喷气推进,机器人将在没有重力的情况下以零重力飙升。
NASA开发人员声称Astrobee不是下一代
SPHERE机器人 。 实际上,这是一个全新的平台,从头开始组装,专为在ISS上自主运行而设计。 最引人注目的增加之一是喷气推进系统。 它从电流“启动”,并且机器人可以在其坞中充电。 例如,SPHERE机器人也知道如何随着喷气运动而运动,但它们取决于电池的电量。 如上所述,当在机器人的设计中添加其他元素时,它将变得更加实用。 可以将模块替换为其他模块,必要时将一个功能替换为另一个功能。
新型机器人与其前代机器人之间的差异可以称为以下事实:SPHERES完全依赖于二氧化碳的可用“电荷”来运动。 人们认为它们不仅可以在车站内工作,而且可以在外面工作。 从这个意义上讲,Astrobee与它的“同事”有很大不同。 它只有在大气中时才能在零重力下移动。 机器人没有二氧化碳电荷,因此其反应系统使用了工作站的空气。 也就是说,它不能移出ISS。
机器人的计算机控制系统捕获空气并向与预定路线相反的方向抛出空气。 Astrobee可以向任何方向移动。
 该照片显示了Astrobee喷气推进模块之一。
该照片显示了Astrobee喷气推进模块之一。立方体其中一个面的保护壁的后面是一个吸入空气的风扇。 还有其他类似的元素。 其运动旨在将陀螺力降至最低。 该系统
不断运转 ,在机器人内部形成了压缩空气袋。 空气,如有必要,系统的运动从特殊的喷嘴中排出。 它们位于Astrobee的所有面上。 如果喷嘴关闭,则机器人不会移动。 打开喷嘴意味着释放压缩空气并朝相反方向移动。
开发商总共提供了12个喷嘴,这些喷嘴按特殊顺序放置。 如果每单位时间仅使用一个喷嘴,则重力为零的立方体将随机移动。 管理它将非常困难。 但是,如果立即使用一对喷嘴,则立方体将以平衡的方式移动。
显然,要在封闭的空气空间中随空气射流运动的系统的存在,就需要制定特殊的安全措施。 如有必要,任何宇航员都可以拿起立方体并将其移至安全的地方。 此外,机器人主体上覆盖有柔软的材料,从而最大程度地减少了由于机器人撞击任何易碎元件(笔记本电脑显示屏等)而可能造成的损坏。
至于车站的舷窗,无需担心。 它们由四层玻璃组成。 两层是耐用玻璃,另外两层是另一种玻璃。 现在,NASA需要证明,在任何情况下,机器人都无法突破其中一层。
此外,开发人员在创建Astrobee时提供了完全的安全性。 换句话说,如果系统软件“疯狂”,则整个系统作为一个整体不应对工作站造成严重损害。 例如,软件中的错误可能会导致机器人尽可能加速并在此模式下经过大约20米(到ISS的最大直线距离)。 在这种情况下,您需要确保击中工作站的任何元素(同一窗口)时,不会造成严重损坏。
在机器人的喷气推进系统的各个元件之间,有大量传感器和机器人自主运行所需的其他设备。 他尤其可以处理货物的流动。 机器人的多个表面设计用于承受负载。 由于存在对象捕获系统,因此机器人可以将其从工作站的一端传输到另一端。
机器人的计算机系统包括三个级别:低,中和高。 中级和高级几乎相同,除了中级基于Linux并负责机器人的大部分功能。 但是上层是在Android的基础上运行的,它负责处理商品并逐点转移商品。 根据开发人员的说法,该级别不太复杂,因此您可以为其编写适用于Android的应用程序,从而扩展系统的功能。
至于传感器,Astrobee有一个主导航摄像头,其视野为116°。 此外,开发人员还提供了具有自动对焦功能的高清摄像机,该摄像机能够将信息从ISS实时传输到地球。 CamBoard Pico Flexx摄像机使该设备能够检测4米距离内的障碍物。 另一个光学检测器确定设备的速度。 如果速度太高,则会关闭许多引擎以降低速度。
Astrobee的优点之一是,该机器人能够在ISS(除了俄罗斯以外的所有地方)周围自主移动。 这是工程师和科学家们的一项重大成就,因为在国际空间站内部存在一个分段的空间,而在那里导航以寻找机器人并不是那么简单。 但是,它的组织方式非常合理,因此机器人无需过多地“拉紧”来导航各个隔间。 机器人的内存中有一张主地图,因此通过环境的一帧,机器人可以了解它的位置。
但是在运动过程中与人互动是一项更加艰巨的任务。 人们或多或少地无法预测地移动,并且机器人在移动过程中不应与他们碰撞。 在研究Astrobee的过程中,也解决了这个问题。 顺便说一下,机器人的自主模式可以被禁用和远程控制。
专为机器人设计的扩展坞可以为设备的电池充电并获取遥测数据。
如上所述,为了对机器人执行许多操作,创建了一个操纵器,并将其打印在3D打印机上。 大多数情况下,机械手处于折叠状态,但是如果需要,它可以分解。 机器人使用摄像机识别可移动的可访问对象。 同样在机械手的帮助下,Astrobee能够在站台空间中移动。 在这种情况下,您可以节省电池电量。 如果仅使用机械手并关闭无功系统,则能耗将降低80%。
机械手末端的“爪”非常可靠-如果机器人在其帮助下进行了固定,但将无法断裂。 但是,尽管如此,如果有必要,宇航员可以卸下机器人,特别提供了这样的压力:即使出了问题,人也可以轻易拿起固定的机器人。
那么为什么需要它呢?
机器人的主要任务是帮助宇航员执行许多例行任务。 不管机器人将脱机运行还是被远程控制,它都应该能够代替一个人。 例如,安装便携式摄像机,观察站内各种元素的行为,监视站的运行并监视空气质量。 特别地,确定二氧化碳浓度的水平非常重要。 通常会进行这种分析,但是宇航员确实不喜欢这种单调的程序。 但是机器人可以代替这个人,并根据需要经常分析空气。
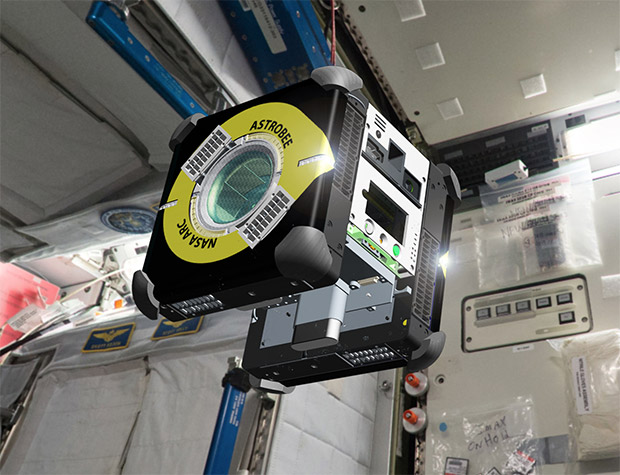 机器人最终原型的外观渲染
机器人最终原型的外观渲染今年,该机器人将无法在国际空间站上运行。 美国宇航局声称将在2018财年启动其空间站。 三个这样的机器人将被立即发送。 两项将执行主要任务,而第三项将作为补充。 如果发送的任何机器人故障,则可以更换。
在这些机器人到达国际空间站之前,它们的前身SPHERES已被移除。 过去,这些设备表现得很好,它们收集的数据极大地帮助了科学家开发新一代机器人。 一个机器人可以极大地减轻国际空间站的工作人员的负担,其中三个机器人将完全免除宇航员的一些次要但费时的工作。