 磁场使单个螺钉旋转,从而控制玩具的手臂,腿部和头部通过绳索的运动
磁场使单个螺钉旋转,从而控制玩具的手臂,腿部和头部通过绳索的运动有两种方法可以远程控制机器人。 您要么尝试为其配备自动推进系统和导航系统(非常困难),要么制造一个可以在磁场中移动的非常小的机器人。 机器人由大型外部磁铁控制。 在医学中尤其需要对这样的设备进行远程控制,特别是因为尺寸甚至
为几微米的设备都容易受到磁控制。 已经完成
了将 导管远程
放置在 心脏中以及控制
胃肠道视频探头的实验 。 微型机器将药物输送到特定人体器官的巨大潜力。
但是,磁控制的许多有希望的应用都需要一个人而不是一个人的协同工作,而是需要许多微型机器人。 到目前为止,科学家只能在同一个领域中实现同一机器人的同时运动,而无法实现该群体的任意参与者。 是的,有许多关于从一群人对机器人进行单独控制的实验。 但是在所有情况下,这些机器人在磁性能或设计上都必须彼此不同。 因此,飞利浦股份有限公司创新技术研究实验室
的物理学家的
科学工作非常有趣。 他们学会了在任意位置扭曲磁场-并成功进行了实验,以拧紧和松开彼此相邻的单个螺钉。
乍一看,尚不清楚如何将任意螺钉的扭曲与控制人体中的机器人群相关联。 但是,如果您考虑一下,这些任务将非常接近。 毕竟,以这种精度控制磁场可以使您在人体的特定区域产生磁性牵引力-正是磁性装置所在的位置,必须将其置于运动状态。
用磁场拧紧单个螺钉工作原理
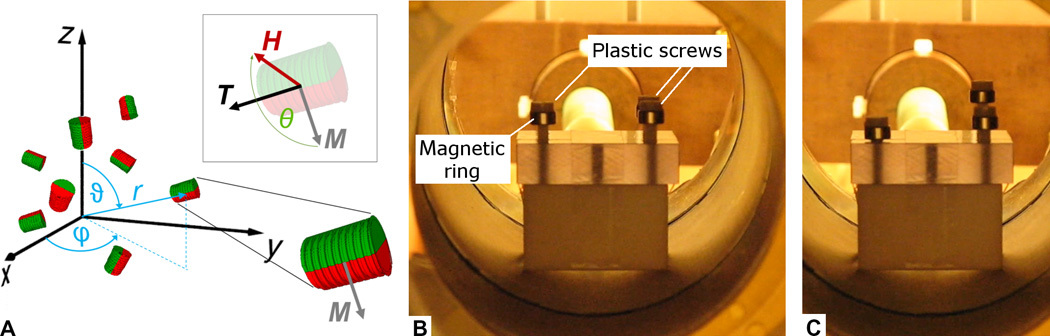
下图显示了一个直径为12 cm的磁场施加器,它由三对沿三个空间轴安装的铜线圈和圆柱形铁芯组成,以增强沿z轴的磁场。 该设计在原理上与磁性粒子成像(MPI)装置有点相似,但是这里提出了相反的任务-不是高精度地检测磁性粒子的位置,而是以相同的高精度来控制这些物体。

如果相同幅度的电流沿两个线圈流动,则沿轴向会出现空间均匀的磁场,就像在
亥姆霍兹环中那样 。 三对线圈的组合使您可以生成任意方向的均匀动态场。 如果相同幅度的电流沿相反方向流动,则一对线圈的作用类似于
麦克斯韦线圈 ,形成梯度场(在右上图和下图)。
 麦克斯韦的理想线圈配置
麦克斯韦的理想线圈配置进行概念性实验时,科学家证明,他们可以拧紧实际上位于磁场发生器内部任意位置的螺钉。
该图显示了如何计算磁化矢量的方向并生成转矩。 物理允许您同时拧紧/松开所有螺钉或单独拧松每个螺钉。
科学家认为,开发的设备已经可以用于医学领域。 例如,拧紧和松开放置在牢固固定在人体周围组织的胶囊或植入物内的螺钉。 如果胶囊被锁定,它将不会随着螺钉旋转。 此外,胶囊的固定强度可能很高,以至于您可以将螺钉或螺钉直接拧入人体组织中。 例如,在骨骼中。
也许用磁场扭曲设备可能适用于微型机器人在体液中的运动。 在这种情况下,医生将获得对人体中大量微型机器人的急需的选择性控制。
此外,可以通过旋转各个控制螺钉来控制人体中更复杂的机器,如KDPV中以乐高玩具为例所示(科学论文插图)。 可能是体内一些复杂的植入物。 也许在整形外科中,无需使用电动机或在设备内部安装电池就可以调整植入物的形状。 科学家们建议在设备的肢体加长,微泵控制,药物的远程释放以及将
103 Pd型放射性颗粒准确引入癌性肿瘤中(接触放射疗法)中螺钉的远程旋转的实际应用。
该科学文章于2017年2月15日
发表在《
科学机器人 》杂志上(doi:10.1126 / scirobotics.aal2845)。