不久前,我在互联网上绊倒关于直升机的文章和视频时,我认为这很困难,而且每个人都无法使用。 但是渴望成为一名直升机向导的愿望很大,在研究了有关此主题的大量材料之后,他亲自为自己总结了建造一架直升机的必要条件,这是一栋从头开始的建筑物,他本人也不想购买成品版本。 现在,我想与大家分享我在MultiWii SE v2.5上建造直升机的经验。 在这篇文章中,我将尝试详细描述从零开始到第一次飞行,再到绝对飞行初学者的全直升机建造的整个过程,他本人是前一段时间。
关于四旋翼飞行的一些理论
我们将在“ X”形经典框架上组装直升机。 管理直升机并不像乍看起来那样容易,它没有像无线电遥控汽车那样前后。 使用“前进”命令,直升机不会在飞行员注视的地方飞行,而是在直升机鼻子指向的地方(飞行控制器上有相应的
箭头 ),这对于初学者来说是很大的危险,因为 从地面很难确定直升飞机的机头在哪里,因此在建造直升飞机时,您需要以某种方式进行标记,例如,使用不同颜色的射线或放置LED。 控制直升机,即 为了确定和设置其在空间中的方向,我们将俯仰,滚动和偏航角+爬升。 通过改变这三个角度可以实现直升飞机在必要方向上的飞行。 例如,要向前飞行,直升机必须将其鼻子弯曲到地面(俯仰)。
油门-汽油,爬升
副翼-副翼,副翼(副翼)
电梯-电梯,俯仰(俯仰)
舵-舵,偏航
马达:
LFW-左前,顺时针旋转
RFC-右前,逆时针旋转
LBC-左后,逆时针旋转
RBW-右后方,顺时针旋转

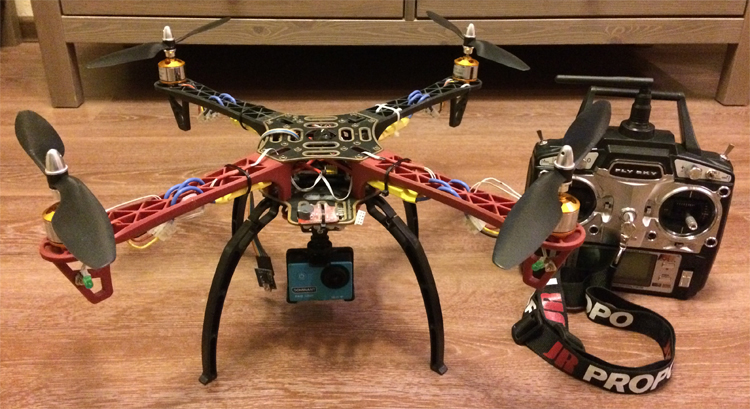
必要组件:
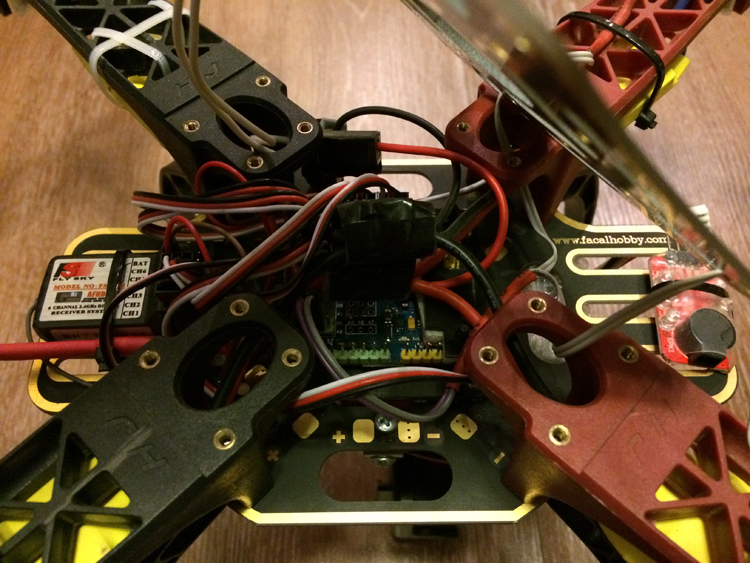
飞行控制器 CRIUS MultiWii SE v2.5
FTDI程序员
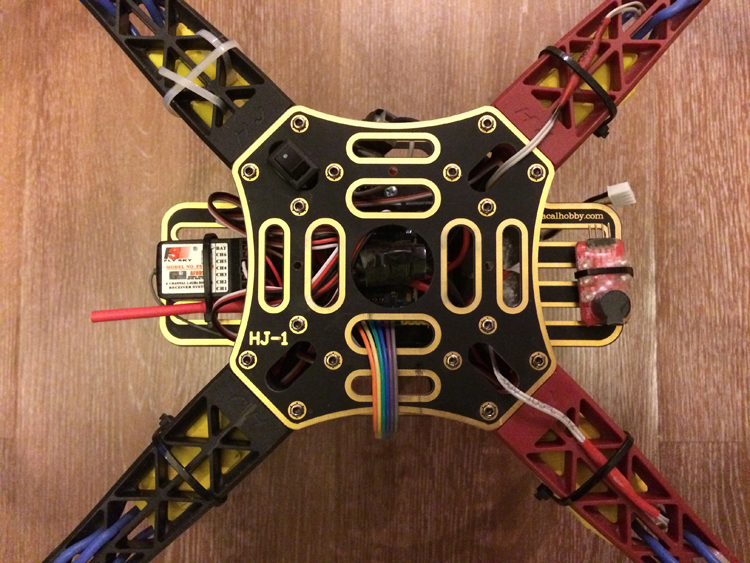
框架HJ450
马达2212-1000KV-4个
ESC 30A速度控制器-4个
电池11.1V 2200Mah 3S 40C Li-Po( 示例 )
电池充电器B3 AC 2S-3S 7.4V 11.1V锂电电池平衡器
T型插头电池线
塑料夹
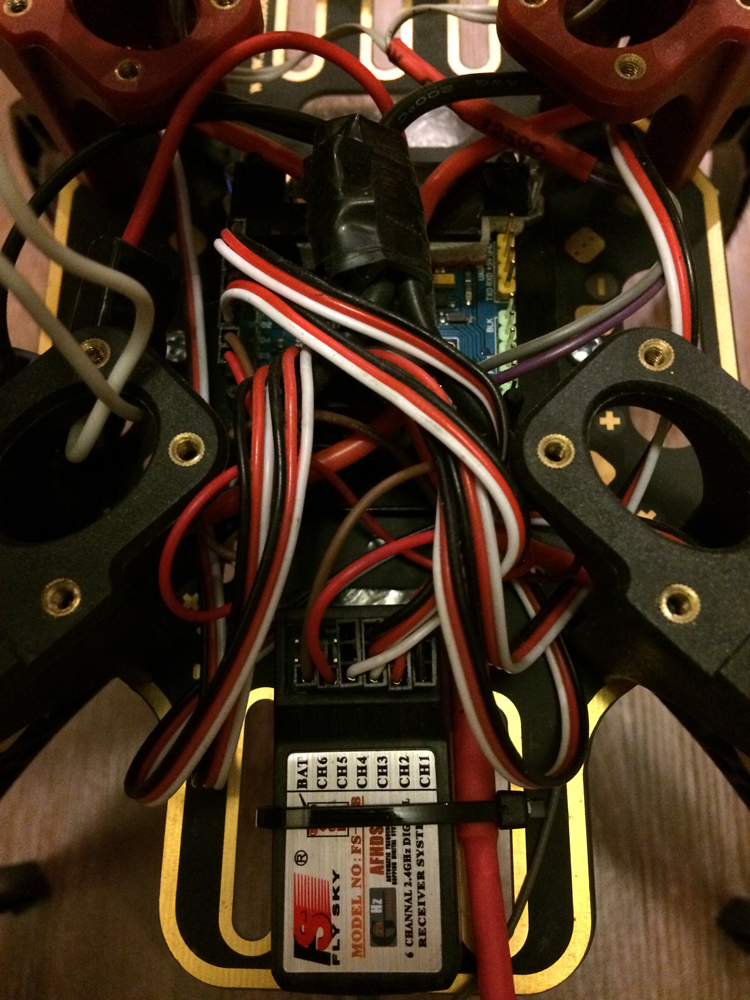
FlySky FS-T6 2.4G 6CH控制设备,带接收机
螺旋桨1045(10x4.5)CW / CCW-2个 顺时针旋转+ 2个。 逆时针旋转; 拿更多的螺旋桨,因为 在学习如何控制直升机时,当它们坠落时,它们会断裂一次
可选地:
着陆腿
电池测试仪Li-Po电池电压指示器测试仪低压(电池放电时会发出信号)
组装方案:

组装前,必须校准ESC控制器,过程如下:我们将电动机连接至控制器,将调节器连接至接收器(CH3)上的气体通道并连接至电池,将控制设备上的气棒抬高至停止位置,打开电源-发出特征性声音,降低气棒的压低一直-发出独特的声音,然后我们进行测试-升高/降低气棒-检查操作,关闭仪器-调节器已校准; 使用该类比,校准所有ESC(为清晰起见,请使用合适的
视频 )。
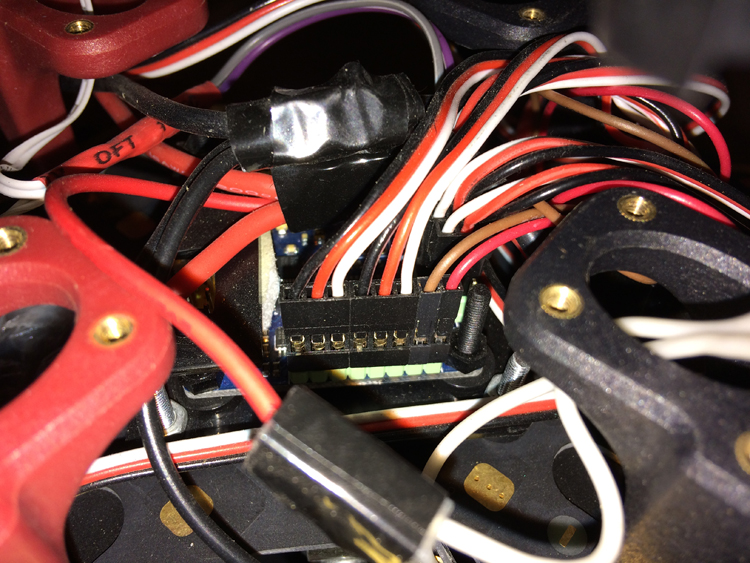
我们组装框架,安装MultiWii,安装电动机,将ESC控制器连接到电动机,MultiWii和蓄电池(我们将调节器的“正”和“负”分别连接到“ +”和“-”电池)。 请注意,要更改电动机的旋转方向,您只需要交换从电动机到ESC的三根导线中的任意两根导线即可。 最好通过平台将MultiWii安装在框架上(我
自己做过,但是您可以购买),以避免外壳短路和数据准确性。 我还为气压计制作了一个小“集体农场”-我用泡沫橡胶将其封闭,以减少数据中的误差。
其他通道CH5和CH6可用于启用功能:保持高度,返回原位,控制相机的云台等,您可以在
本文中阅读更多
内容 。 我的二极管连接到A2上的“ +”和“-”。 FTDI编程器连接到板上相应的FTDI连接器。






组装并连接完所有组件后,您需要在MultiWii中填写固件,您需要通过Arduino IDE程序进行操作(您可以在
此处下载当前版本)。 我们通过FTDI程序员将MultiWii连接到PC,启动Arduino IDE,在菜单中选择板子所连接的COM端口,还在菜单中选择板子的类型,打开固件(文章末尾的链接),打开MultiWii.ino文件,您将在上面看到几个选项卡,我们只会对config.h感兴趣,因为我们需要配置固件-根据需要取消注释(删除“ //”)所需部分中的其中一行(链接到config.h文件,最后是我的设置)的必要设置文章),设置完成后,在MultiWii中填写固件。
现在,我们需要继续通过GUI配置直升飞机,为此,我们将使用MultiWiiConf程序(本文结尾的链接)。 我们通过FTDI编程器将MultiWii连接到PC,启动MultiWiiConf,在菜单中选择板子所连接的COM端口,按开始按钮(数值应出现在图形上),然后编辑参数-按READ,以保存参数-按WRITE。 选择端口并按START(看到图形已生效,数据已到达)后,您需要校准传感器:校准加速度计,将直升飞机设置为与水平方向平行,然后按CALIB_ACC按钮,GUI将冻结一会儿,然后确保ROLL和PITCH轴平行; 要校准磁力计(罗盘)-按下CALIB_MAG按钮并沿所有轴旋转直升飞机,或将直升飞机交替放置在肋骨上30秒钟。 同样,在将配置程序成功连接到直升机后,在右上角您将看到蓝色条显示遥控器的通道,移动操纵杆以确保一切正常。 最小位置的摇杆应该显示值1000,中间的位置应该显示值1000,最大位置应该显示值2000; 如果不是这样,请按照遥控器的说明进行修整(文章末尾的链接)。 请记住,条带必须根据棍棒的移动进行移动,即 如果将油门杆抬高,则条带应该上升(对于其他通道也是如此),如果不是这样,则反转遥控器的通道。 同样在GUI中,您可以设置要添加的功能。 通道,例如高度保持(BARO)。 必须始终启用水平对齐(LEVEL)功能! 这是一个合适的
视频,用于说明MultiWiiConf程序的操作。
关于这个话题的一些题外话
不要期望该函数将硬悬停的高度(BARO)保持在某个点,因为 为此使用了晴雨表-直升机肯定会尝试保持激活该功能所处的高度,但是为了保证晴雨表数据的准确性并保护其不受外界影响,它会在±几米的半径内游泳,我用泡沫橡胶制成了一个``集体农场''。 请记住,必须在悬停气体上激活高度保持功能,即 然后,当您使用气棒确保直升飞机±保持在同一高度时,建议不要在激活该功能后触摸气瓶。 为了更精确地悬停一点-最好使用可选的GPS模块。
航线保持功能(MAG)非常反复无常,对我的使用令人沮丧地终止,在激活和起飞后,直升机开始像旋转的陀螺一样旋转并迅速飞离我,试图确定直升机的机头并使其返回航线是失败的,我别无选择如何向地面投掷汽油并奔向一点 这是秋天后的简短
视频和
照片 。 可能是由于指南针校准不正确,电磁干扰或其他原因引起的。 通常,使用前请先阅读Internet上的信息,并要小心。
对于将来,不要随身携带带有MultiWiiConf程序的笔记本电脑对您很有用-您可以将HC-05蓝牙模块连接到MultiWii控制器(连接到UART连接器)并通过Android应用程序(
MultiWii配置和
EZ-GUI地面站 )通过蓝牙连接到直升机,并进行必要的设置,类似于MultiWiiConf中的设置。
起动发动机的过程如下:打开直升机的电源(吱吱作响),打开应用程序,将油棒从较低位置移到右侧-电动机启动(进给)并空转,现在平稳地排出气体。 要停止发动机,请将油门杆从较低位置移至左侧-电机已停止,请关闭直升机电源,然后关闭应用程序。
仅此而已,我希望我的文章对您有所帮助,但是现在您可以安装螺旋桨并向前推,在我们这个例子中,祝您好运,减少跌倒。
我的航班的简短视频
下载链接:
存档 -MultiWii固件+ MultiWiiConf程序
带有我的设置的Config.h
文件FlySky FS-T6
手册PS-此处继续:
“在直升机上安装FPV和遥测”