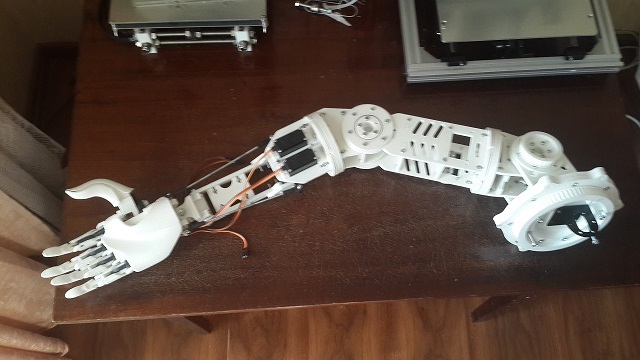
今天,我们想谈谈Oscar促销机器人操纵器的设备。 尽管起初没有对机械手提出严格的工业要求,但是,我们的目标是提供一种实用且美观的解决方案,同时又不是很昂贵,而且在家中也相对简单。
机械手从肩膀到指尖的长度为0.6米,重量-2.25千克。 制造材料-PLA。 该操纵器可以有条件地分为3个部分:
- 仿生刷
- 腕部(2个自由度)
- 肘关节和肩关节(5个自由度)
这是由于每个组件都有自己的技术解决方案。
仿生刷
为了快速而轻松地开始,决定将开源的Hackberry项目作为基础。 刷子的设计略有修改,以适应您的需求。
手指控制驱动器位于刷子本身中。 一共有三个。 一只在拇指上,一只在食指上,另一只在其余。
借助这种巧妙的抓地力,机器人可以拿起一些大物体,例如一瓶矿泉水,并与人握手或抓住一个较小/较细的物体,将其握在拇指和食指之间。
手腕
手腕具有差动驱动,并由一对杆控制。 杆的一端连接到电刷的基座,另一端连接到伺服杆。 因此,获得2个自由度。
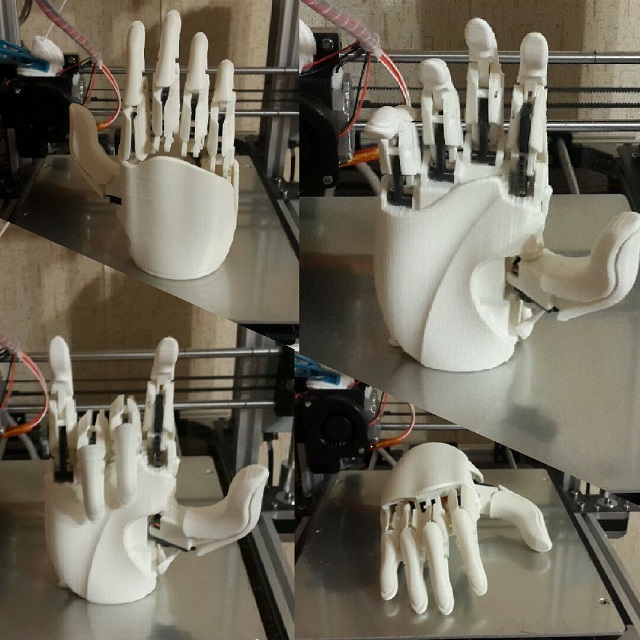
为了更美观,设计了前臂主体模型,并在3D打印机上进行了打印。

外壳是通过真空成型制成的。 结果就是这样的拟人化手。

我认为它看起来很漂亮。
肘关节和肩关节
我认为,这里就是乐趣。 为了获得这些关节可接受的行为,与用腕部开发腕部的非常平稳的阶段相反,我们必须在机制和控件上进行巧妙的修改。
管理层,决定在通常的37Dx70L DPT的基础上实施伺服系统,我们从以前的项目中获得了适当的数量。
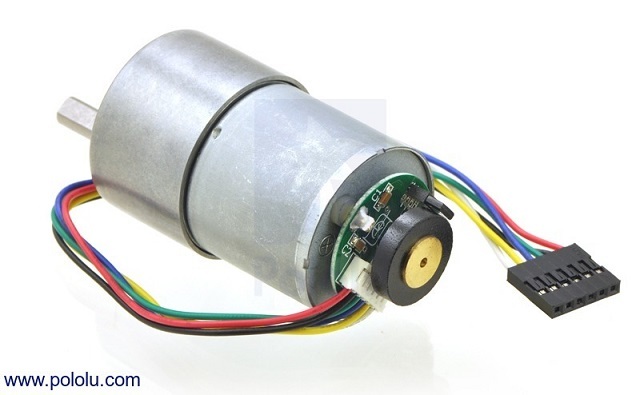
通常,我们喜欢DPT的数据,但它们有一个缺点,即噪声水平。 将来,我们计划将它们替换为相同的,但噪音较小。

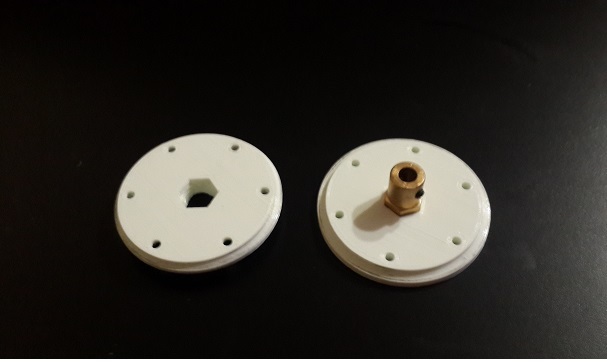
在3D打印机上打印的轴承和轮廓是关节轴承构造的基础。 轴承由成对拉在一起的四个半凹槽和4、6和8毫米的金属球组成。
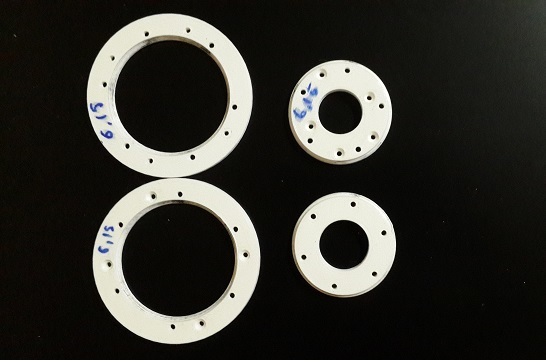
型材具有用于互连的凹槽;还使用了附加的加强筋。 所有的幸福被螺栓拉在一起。
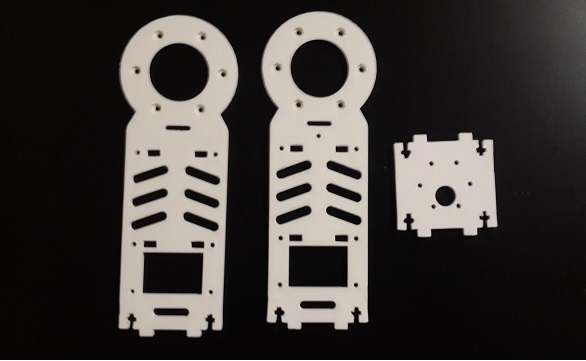
最初,电动机轴在某种程度上是通过联轴器固定在轴承上的。
但是由于缺乏正确的速度和精力的驱动器,我们重新设计了皮带驱动器的设计。
塞尔瓦
对“服务器”的管理提出了以下要求:
首先,我们在互联网上寻找类似的项目-我们并不是唯一一个“聪明”的项目。 基于我们喜欢的项目之一,我们对结果非常不满意。 驱动轴的定位非常平庸。
因此,我们仅对定制解决方案的开发感到满意。 在这件事上,
“保持伺服驱动器中的位置:从属调节与步进模式”一文有很大帮助,这要感谢作者!
总体管理方案如下(该方案取自以上文章):
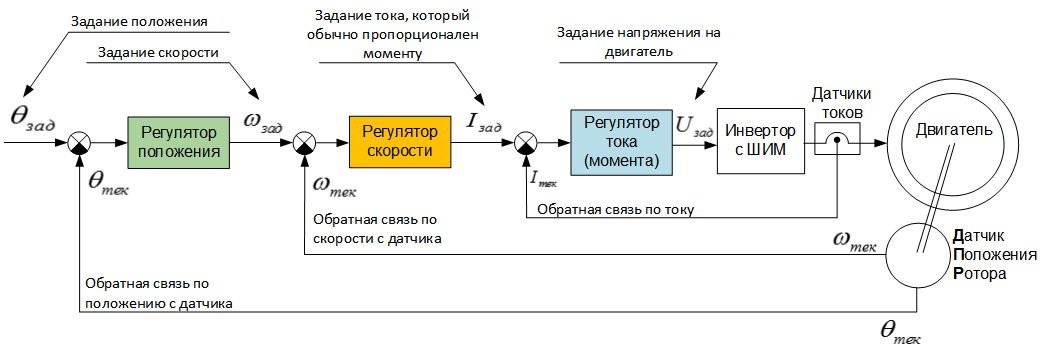
在我们的电路中,as5045磁性编码器用作位置传感器,而电流读数则使用GY-712 5A传感器获取。
最初,使用Arduino Mega来控制驱动器,尽管结果令人满意,但我们最终还是选择了更可靠的基于管的STM32F4。
这是驱动器的结果:
在无负载的情况下控制“伺服”的输出轴取得了可接受的结果,因此将其放置在机械臂中。 “突然”事实证明,控制驱动器和操纵器是两回事。 问题是操纵器在目标点处“香肠”,发生了所谓的“ Serge Bounce”。 我们尝试了不同的调节器系数,但一切都是徒劳的。
我们麻烦的原因是臭名昭著的重力。 在悬挂位置(当手臂垂直向下降低时),为了在肩关节中进行10度调节,需要一个调节器系数,而其他系数则需要在水平位置实现相同的偏差。 因为 由于系统不是太动态,因此要确定重力影响的程度并随后对其进行补偿,我们使用了通常的三轴加速度计来解决了我们的问题。 这个决定并不假装是万灵药,这只是我们的方式。 也许在我们的文章读者中,有经验丰富的电动驱动器可以提供一些建议。
这是一个对肩膀度数的视频测试(事实证明,这是管理上最困难的度数)。
当然,该操纵器的整个视频是:
最后
总的来说,我们对操纵器第一个版本的实现感到满意。 所有“ servs”的平均误差在0.2-1度的范围内变化(请勿使用此机械手进行此手术)。 我不太喜欢握把-太重(350克)。 我们很可能会发展自己的。 将来,我们希望提高所有角度的精度,重做手腕的机械装置-将我们的“定制”伺服器放在那里,并建立一个安全系统。
接下来是什么?
现在,我们正在完成Oscar-a负责人的工作,将在下一篇文章中讨论。
感谢您的关注! 祝大家有美好的一天!