大家好 今天我们将讨论奥斯卡宣传机器人的负责人。 人们通常会像与自己一样与机器人进行交流:在对话中看着脸庞并寻求情感回应。 因此,我们的促销机器人的头部应成为引起人们注意的主要因素之一。
为了使头部真正“栩栩如生”,我们确定了以下要求:
- 头部应具有两个自由度:倾斜和旋转
- 必须在场跟踪对话者头
- 机器人的眼睛必须对对话者做出反应
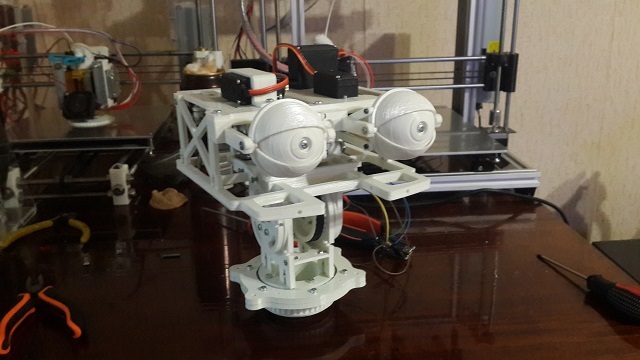
从结构上讲,头部分为两个部分:
头部设计
首先,我们从头的设计开始,以了解形状因素以及如何将所需的所有东西放置在头中。 通常,此过程是反复的,有时非常困难,特别是对于以前仅设计齿轮的工程师而言。
经过几次迭代后,我们得到了一个草图,该草图大致考虑了舵机的位置和眼睛的机械原理。
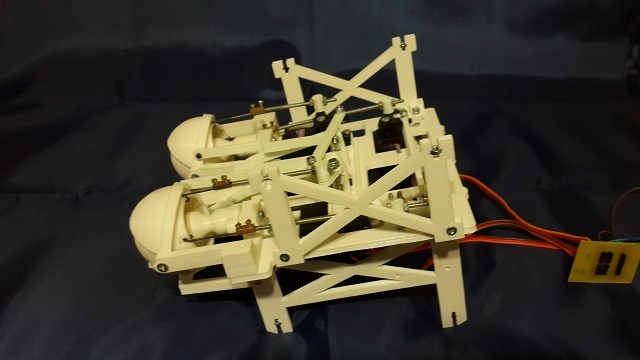
领子
机器人的头部具有两个自由度:倾斜和旋转头部。 颈部设计的基础是轮廓和肋骨,我们已经在
操纵器中使用过。
为了控制自由度,使用了我们的定制服务器。 我们将通过速度旋转头部,即 由于服务器可以控制速度,因此头部的旋转速度将取决于被跟踪人员在帧中的位置。 脸离中心越远,头部转动得越快。 当您接近中心时,速度将降低为零。 这样,您就可以相当顺畅地旋转头部。
眼睛
在这里,我们也不想花很多时间,所以我们决定寻找现有的电子动画眼项目,这样的项目是马车和小型手推车,这很好。 在我们发现的那些
项目中 ,我特别要注意
一个项目 。
我们以此为基础。 一切都很好,直到我们开始尝试将眼睛的力学,现有的头部设计和颈部的力学结合起来。 最后,我必须开发自己的“自行车”。 结果是这样的眼睛设计:

眼睛由arduino_nano驱动。 为了控制serv,他们采用了标准
库 。 Servas由单独的电源供电,arduino无法发出足够的电流。 起初,“弹跳”存在一些小问题,破坏了整个美学。 然后他们找到了原因-问题是质量差的电源调节器,用
另一个类似的功率调节器代替了。 还有另一件事,爱好伺服器不喜欢长电线,因此我们消除了伺服器和控制器之间的多余长度。 眼动是通过设置伺服器的旋转角度来实现的。
作为测试,我们将使用状态的第二人Dmitry Anatolyevich Medvedev。 突然之间,对于辛勤工作,为该项目的开发提供的资助将“落在”他的头上。
如何运作?
所有这一切都非常简单,因为 头部和眼睛必须对人作出反应,那么信息对他们来说将是相同的-位于机器人头部的摄像机。 来自Raspberry的二手相机。 顺便说一句,我们在这里做了一个小缺陷-我们拍摄了一个视角较小的相机。 在测试过程中,很明显有必要安装广角摄像头-然后可以使面部表情更加生动,因为 可以将视线移到更大的角度。
Raspberry Pi 3用作图像处理器。我想说Malinka可以自信地完成这项任务,但是在低分辨率下确实如此,同时在所有4个内核上都提供了明显的负载。
人脸检测是通过经典仪器-Haar级联进行的。 此外,人脸检测的频率为9-12 FPS。
与人类比,机器人首先看着对话者,然后将他的头转向他。 尽管可以使用相对较高的头部旋转速度,但我们还是放慢了速度。 根据检测脸部的速度来调整头部旋转的速度,我们获得了平稳而优美的动作。
我们对组装好的头感到满意。 你觉得呢 我还能添加或做什么?
接下来是什么?
现在,我们正在完成第二个机械手的组装,此后,我们将转向制造带有行李箱的平台。 所有这些都需要暴露在一个体面的建筑中。 希望在下一篇文章中,我们能充分展现我们的创意。
您待在这里,祝您一切顺利,身体健康!