从历史上看,机器人的使用始于生产。 首先,创建机器人来执行单个操作,然后创建机器人生产站点,最后创建灵活的生产系统。 他们的运作经验使我们得出结论,在不远的将来,产品的数量可以增加数倍,而不会增加人工成本。 但是,毫无疑问,科学和技术进步的成就不仅带来了人们对期待已久的富裕的希望,贫穷的消失等,而且还带来了某些恐惧。
 自动生产[1]
自动生产[1]实际上,什么都不是。 如果消耗量增长几倍,那么将需要相同数量的资源。 环境已经受到人类的巨大压力。 据统计,现在已经有一个人每天生产约3-5升垃圾,相当于每月120升,每年1,500升[9,由于对Dragonnur的观察,其源头误差得到了纠正]。 甚至将产量提高一倍也引发了环境灾难。 事实证明,机器人在某种程度上类似于核武器-具有潜在的巨大潜力(在破坏性武器的情况下,对于创造性机器人而言)由于普遍的悲剧性后果而无法大规模使用。
 摘自电影《垃圾填埋场》,2014年[2]
摘自电影《垃圾填埋场》,2014年[2]幸运的是,机器人不是热核炸弹,可能性与后果之间的矛盾还没有解决之道。 该出口是机器人本身,适用于处理生产和消费废物。 按照旧的原则,像对待一样。 如果我们将产量提高一倍,同时创造出这样一种机器人系统,该系统将利用并将50%的废物转化为次级原料或能源,那么环境负荷将不会改变。 如果利用率达到67%,则产量可以增加两倍。 依此类推。
自然,这是一个非常粗糙的方案。 实际上,有必要考虑特定的处理方法和数量,制造附加设备的成本以及许多其他因素。 但是很明显,消费量的增加与废物处理的程度密切相关。 而且,由于社会消费水平很高,还不太愿意做肮脏的体力劳动,因此机器人将不得不努力工作。 他们已经开始工作。
废物处理任务可以分为三个子任务:
让我们从第一个开始。 现在,使用机器人吸尘器或机器人清洗窗户的人不会感到惊讶。 但是,这些是收集废物的最简单的机器人。 但是,当然,它们的能力非常有限,从进一步处理的角度来看,相应的废物-主要是家庭和街道的灰尘-不再引起关注。
 IClebo Pop机器人吸尘器[3]
IClebo Pop机器人吸尘器[3] 窗户自动清洗机Windoro WCR-I001 [4]
窗户自动清洗机Windoro WCR-I001 [4]但是,“游荡”的废纸already已经比通常的废纸effective有效得多。 在日本丰桥技术大学的交互和通讯开发实验室中,创建了一个小的轴距箱。 它被称为社交垃圾箱(STB)。 该机器人配有微处理器,摄像机和扬声器,以及红外传感器和距离传感器。
 社交垃圾箱[5]
社交垃圾箱[5]机器人通过确定当前有人在的地方来开始其剧烈的活动。 这是通过使用红外传感器对人体的热量做出反应来实现的。 距离传感器负责在人与人之间移动机器人的安全性。 为了搜索垃圾本身,机顶盒使用集成摄像头结合对象识别算法。
当机器人发现垃圾时,它开始进行主动的“身体运动”并发出声音信号。 因此,他“要求”人们捡拾垃圾并将其扔进容器。
位于桶上部的红外传感器将使您知道垃圾是否真正到达了应该到达的位置。 机器人甚至可以将铲斗向任何方向稍微倾斜,以使人员更轻松地完成任务。 一般而言,我们在保护环境方面积极开展人机合作。 此外,该机器人不仅充当垃圾收集器,而且还充当闹钟,供恋人良心在任何地方进行垃圾处理。
但是就像不能铲起大海一样,所有垃圾也不能收集在小篮子里。 为此,需要功能更强大的部队。 例如,那些是在DustBot项目(www.dustbot.org)的框架中开发和测试的,用于开发小城市规模的机器人清洁和垃圾收集技术。 它涉及来自意大利,西班牙,英国,瑞士和瑞典的许多专家,但主要角色来自位于比萨的圣安妮高等学校(Scuola Superiore Sant'Anna)的研究人员。 该项目由欧盟委员会提供资金支持。
第一个机器人称为DustClean,是一种自动扫地机,配有旋转刷和真空吸尘器。 DustClean清洁街道,沿着给定路线在城市中穿行,同时在行人面前停下来并避开障碍物。
 除尘机器人[6]
除尘机器人[6]第二个机器人名为DustCart,可以称为拾荒者。 他从城市居民那里收集垃圾袋,并将其回收。 机器人的高度为150厘米,重量为70公斤,速度为1 m / s。 一次充电足以充满16公里。
 垃圾车机器人[6]
垃圾车机器人[6]为了使机器人垃圾车到达目的地,需要通过电话呼叫。 机器人到达后,客户通过DustCart机箱上的屏幕输入个人代码。 这是必要的,因为将来应该支付此类系统费用。 同时,一个人可以选择不同的路线来进一步运输垃圾,以及垃圾的类型(有机垃圾,玻璃,塑料或纸张)。 操作完成后,客户将垃圾袋放在机器人的开口处,然后他到达废物收集点,在那里将其卸下。
DustBot项目中的机器人无法完全解决垃圾收集问题。 他们的目的是适度的-在传统清洁设备不适合的地方工作。 欧洲城市中有很多这样的地方。 此外,机器人还配备了确定空气中苯,氮氧化物,碳和硫含量的传感器以及温度传感器。
DastBust的现场测试在意大利小镇Pechcholi进行。 Pechcholi公社是世界上第一个定居点,在道路上已在道路上分配了一条单独的车道供机器人移动。
 DustCart急于选择下一部分垃圾[7]
DustCart急于选择下一部分垃圾[7]DustBot之后的下一个规模将是沃尔沃演示的ROARY机器人。 该开发是与查尔姆斯理工大学,马拉拉伦大学和宾夕法尼亚大学的专家共同进行的。 该项目演示了两个机器人联合工作的可能性,这将在将来帮助便利城市工人的日常工作。
 ROARY工作时,侦察无人机在附近某处窥探[8]
ROARY工作时,侦察无人机在附近某处窥探[8]ROARY在固定在垃圾车后部的特殊平台上运输。 垃圾车本身在右侧几乎看不见,因此可能给人一种错误的印象,即ROARY是完全自主的。 实际上,它的自主权明显低于DustBots。
到达后,操作员启动安装在车顶上的无人驾驶飞机,然后无人机扫描周围环境以检测垃圾箱。 该系统将容器位置的数据传输给机器人,该机器人将垃圾容器装载到特殊平台上,返回到垃圾车并抬起容器,以清除杂物。 总而言之,ROARY适合清道夫工作中最艰苦最肮脏的部分。
为了导航地形,ROARY使用GPS和激光雷达,这使他避免了与障碍物的碰撞。 借助内置摄像头,ROARY可以在清空容器时检测到危险位置靠近垃圾车的物体,并且自动紧急停止功能将警告可能的不愉快后果。 垃圾车操作员可以使用紧急停车。
通常,根据审查的三个系统来看,机器人具有处理垃圾收集的能力。 特别是如果人们有所帮助。 这是公平的-每个人都应该自己清理。 但是没有人有义务追赶别人,更不用说铲除多年来积累的废物。 因此,您将不得不再次转向机器人。 更具体地说,由芬兰公司ZenRobotics开发的ZenRobotics回收机(ZRR)系统。
当前,用于预分类垃圾的经典方法分几个阶段进行:
- 使用功能强大的电磁体对金属/非金属进行分类。
- 吹气使分类很重/不很重。
- 手动阶段。
在第三阶段,传送带上有一些人,他们在一定的介绍和掌握的技能的帮助下,对垃圾进行分类。 之后,将放置在不同容器中的废物发送到专门的工厂进行回收或生物燃料。 ZenRobotics决定通过创建一种特殊的机器人技术来将人们从肮脏而单调的工作中解救出来,该技术可以将所有三个阶段结合在一起。
没错,到目前为止,这主要是关于建筑垃圾,更具体地说,是关于旧建筑物拆除后残留的大批垃圾。 ZRR包含3个主要部分。 首先,这些是机械手,它们是标准的工业机器人。 其次,这些是用于识别碎片的传感器-各种类型的摄像机和金属探测器。 传感器是固定的。 第三,工业计算机。 “智能” ZRR的基础是公司通过Internet定期更新的软件。
ZRR设备清晰地显示在描绘完整工业系统当前原型的图中。 使用传送带将建筑垃圾在传感器块下方传送。 传感器识别垃圾的每个碎片,并将有关其在传送带上的位置,大小和材料(砖,木头,钢筋等)的信息传输到机械手控制系统。
 当前的原型ZRR [9]
当前的原型ZRR [9]当碎片到达操纵器的操作区域时,只剩下移动到已经计算出的位置,考虑碎片的大小打开抓斗,将碎片从输送机中取出,然后将其与适当的碎片一起扔入容器中。
传感器可能无法可靠地识别一些碎片。 在这种情况下,操纵器将不会对它们进行随机排序。 无法识别的碎片将由传送带传送到一个特殊的集合中,从那里将它们再次馈送到传感器下方的传送带的起点。 最有可能的是,在磁带上且彼此之间的位置不同,可以正确识别这些碎片。 该过程将继续进行,直到将整批垃圾分解成碎片为止。
商用ZRR系统不仅限于原型,还包括至少两个操纵器和笨重的容器。
 ZRR机械手在工作[10]
ZRR机械手在工作[10] 最低商业版本的ZRR [10]
最低商业版本的ZRR [10]基于ZRR,可以构建多阶段分拣系统。 在这样的系统中,单独的安装将按顺序工作-如果第一个安装跳过了任何垃圾碎片,那么第二个安装很可能会解决它。
ZRR软件可以做出独立的决策和自学。 因此,对系统的人为干预极少,仅在发生故障时才需要。
公平地讲,应该指出的是,在没有人的参与(或最小参与)的情况下,ZRR并不是唯一的分类垃圾的可能解决方案。 因此,德国GUNTHER ENVIROTECH公司开发了一种特殊的分选设备SPLITTER,用于分选城市生活垃圾。 此安装不使用传感器,操纵器和复杂的软件。 所有这些都由特殊形状的螺旋钻和竖井代替,可以将垃圾按形状,大小和重量分为3个部分。
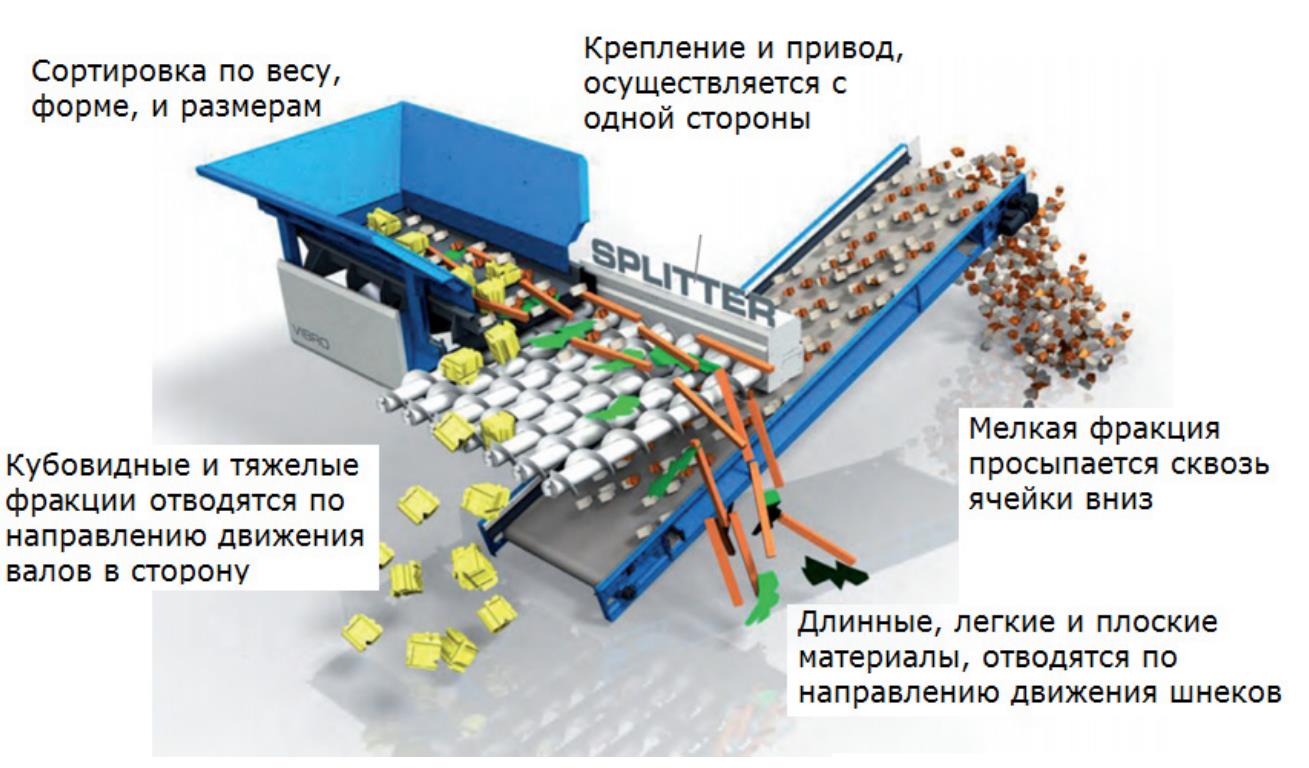 安装SPLITTER [11]
安装SPLITTER [11]尽管设计简单而新颖,但很明显,SPLITTER只能对垃圾进行粗略的初级分离。 如果需要进一步分类,则需要ZRR类型的系统。 因此,在解决我们在本文开头提出的问题(使用机器人技术至少进行2/3的废物回收)时,这些技术并没有互相补充。
事实证明,以2/3的速度处理垃圾时,我们大大低估了可用技术的功能。 由于系统已经在运行,因此可以将利用率提高到97%!
在90年代初期,一群荷兰科学家开始研究和开发一种新技术,其主要任务是不经初步分类就进行废物处理,获得高质量(包括从有毒和有害物质中纯化的)原材料以及成本效益,盈利能力,并同时保护环境安全。
2000年,科学家们结合了上述所有原理,实现了他们的目标,对所谓的“ 3R”技术进行了测试并申请了专利[12]。 该技术由EPC集团运营。
根据3R原理建造的垃圾回收站可以处理:
- 家庭垃圾;
- 大块未粉碎的垃圾(家具,建筑材料等);
- 有机废物
- 垃圾填埋物
- 未组装的汽车和卡车零件,电池,轮胎;
- 电子和电气设备(电视,冰箱等);
- 医疗废物;
- 工业废物
- 电池,温度计,灯
还有更多。
根据任务,工厂配有必要的独立单元。
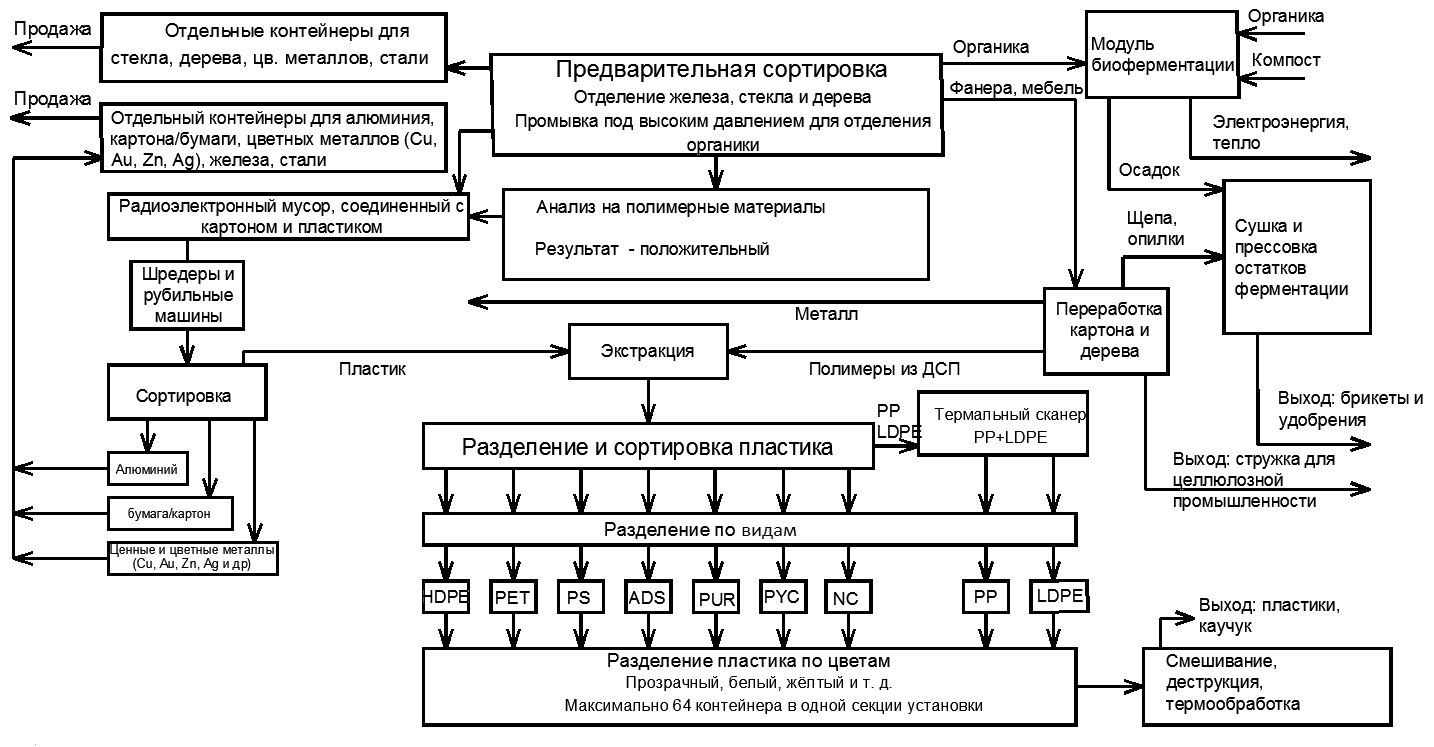 使用“ 3R”技术的垃圾处理通用方案[12]
使用“ 3R”技术的垃圾处理通用方案[12]在设计阶段,将对系统中打算回收的废物进行分析。 因此,确定定性成分以计算制造商可以保证的有效性和回报,以及成分中存在危险或放射性物质。
以下是在3R工厂进行回收的一般过程。
- 未分类的废物会在工厂直接自动分类。 不需要在出厂之前进行其他废物分析。
- 回收过程始于分离非塑料,电气和电子组件。 接下来,将磁性材料以及木材,玻璃分离。 它们全部包装在容器中,以备进一步销售或加工。 在此阶段,可以将ZRR类型的系统集成到“ 3R”技术中,以提高质量并实现全自动分拣。
- 分析剩余的含塑料废物的质量和腐蚀程度。 之后,他们去了菜刀。
- 已经破碎的物料的第二种分类:金属,纸张,纸板被分离并准备出售。
- 清除塑料中提取器中的残留产品。 染料与材料隔离,可以重复使用。
- 塑料按类型分类-PET,PVC,HP,HDPE,PURE,ABS等 塑料加工模块包括多达64个用于分离各种类型塑料的容器。 由于每种物质都有自己的熔化温度,因此使用基于熔点的热扫描仪将塑料分离。
- 按类型划分的塑料按颜色进一步分类。
- 混合和压制:准备出售塑料时要考虑客户需求。
- 气体发酵-收集有机材料用于生物燃料生产。
- 各种类型的木材经过处理和清洁后,可进一步用于制浆和造纸工业。
- 气体发酵产生的原始残留物以及纸板和木材产生的碎屑被输送到煤饼块,然后在其中进行干燥,研磨并压成燃料煤饼。 团块也可以在农业和农业中用作肥料。
注意,来自发酵单元的沼气用于产生能量。 因此,接收到的能量并不直接取决于工厂接收到的废物中有机物的百分比,而仅取决于发酵的时间和强度。 因此,几乎在任何情况下,工厂都不能成为消费者,而是能源供应商(包括其自身)。
根据EPC集团的计算,当处理100千克废物时,我们获得了97千克优质成品原材料(原材料的产量和质量取决于供应给系统的废物类型),并且项目的投资回报率将达到每年30-50%。
利用3R技术,已经在杜塞尔多夫,阿姆斯特丹和哈林根建立了多个垃圾回收厂。 雅加达的一家工厂正在建设中。
以下是对雅加达设计工厂和现有工厂的比较分析[12]。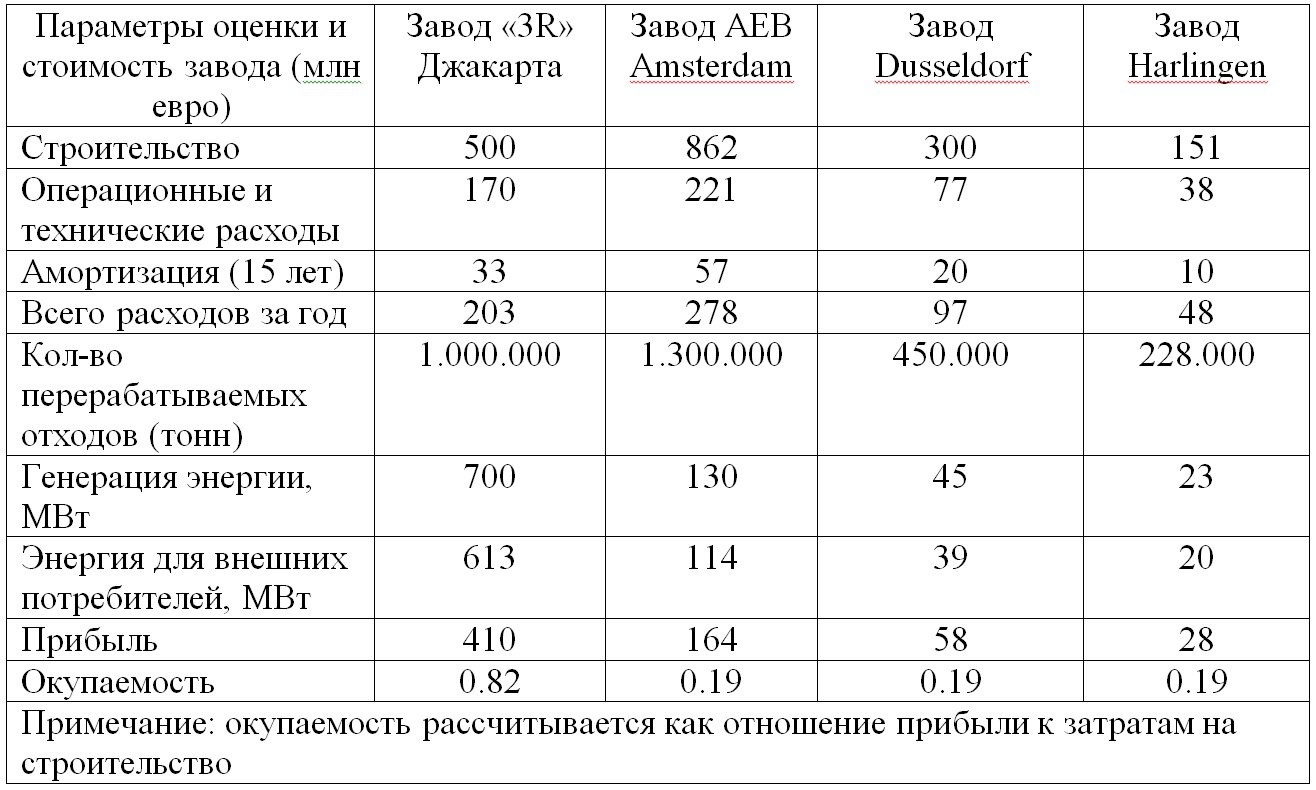 从表中可以看出,所有3R技术工厂不仅处理垃圾,而且还是外部消费者的能源。综上所述,很明显,基于现有技术,废物的收集,分类和处理过程几乎可以完全自动化。此外,自动废物处理可以带来可观的利润。从本质上讲,一个人只需要帮助机器人从事新的贵族职业,尽管如此,也无需将冰淇淋包装纸扔向冲过机器人容器的机器人容器。否则,效果会不佳。
从表中可以看出,所有3R技术工厂不仅处理垃圾,而且还是外部消费者的能源。综上所述,很明显,基于现有技术,废物的收集,分类和处理过程几乎可以完全自动化。此外,自动废物处理可以带来可观的利润。从本质上讲,一个人只需要帮助机器人从事新的贵族职业,尽管如此,也无需将冰淇淋包装纸扔向冲过机器人容器的机器人容器。否则,效果会不佳。