上一代的仿生假体通常借助肌电信号进行控制,肌电信号是人手肌肉收缩的结果。 管理这样的假体并不容易:需要一定的专注力,而成功行动的有效性还有很多不足之处。 第一次做您想做的事并不容易。 就动作的准确性而言,这种假体与活着的真实手的“直觉”动作相去甚远。
近年来,研究人员主要集中在肌电信号的识别精度上,并且单个手指的运动的识别精度已达到90%。 但是由于种种技术原因,这种“智能”假体的大量使用是非常有限的。 英国纽卡斯尔大学工程师
的最新发展提供了一种截然不同的方法。 配备有摄像机的手可以识别前面的物体,并确定如何最好地抓住它。 它可以自动且几乎立即起作用,而无需人工操劳。 实际上,仿生手有其自己的视野。
以前,科学家曾尝试过立体相机和各种物体识别算法。 同时,创建了新的机器人操纵器模型-那里的计算机视觉技术与人类的仿生假肢非常相似。 在机器人技术领域,对最有前途的机器视觉和深度学习技术进行了测试。
纽卡斯尔大学的工程师利用了其前辈的这些发展,并瞄准了机器视觉系统,以识别各种类型物体的
捕获类型,而不是根据其尺寸的特定度量。 也就是说,训练神经网络后的对象是根据捕获的类型而不是对象的类型或类别精确分类的。 作者认为,由于采用了这种根本上新颖的方法,他们能够大大提高系统的速度,因为它忽略了不必要的细节。
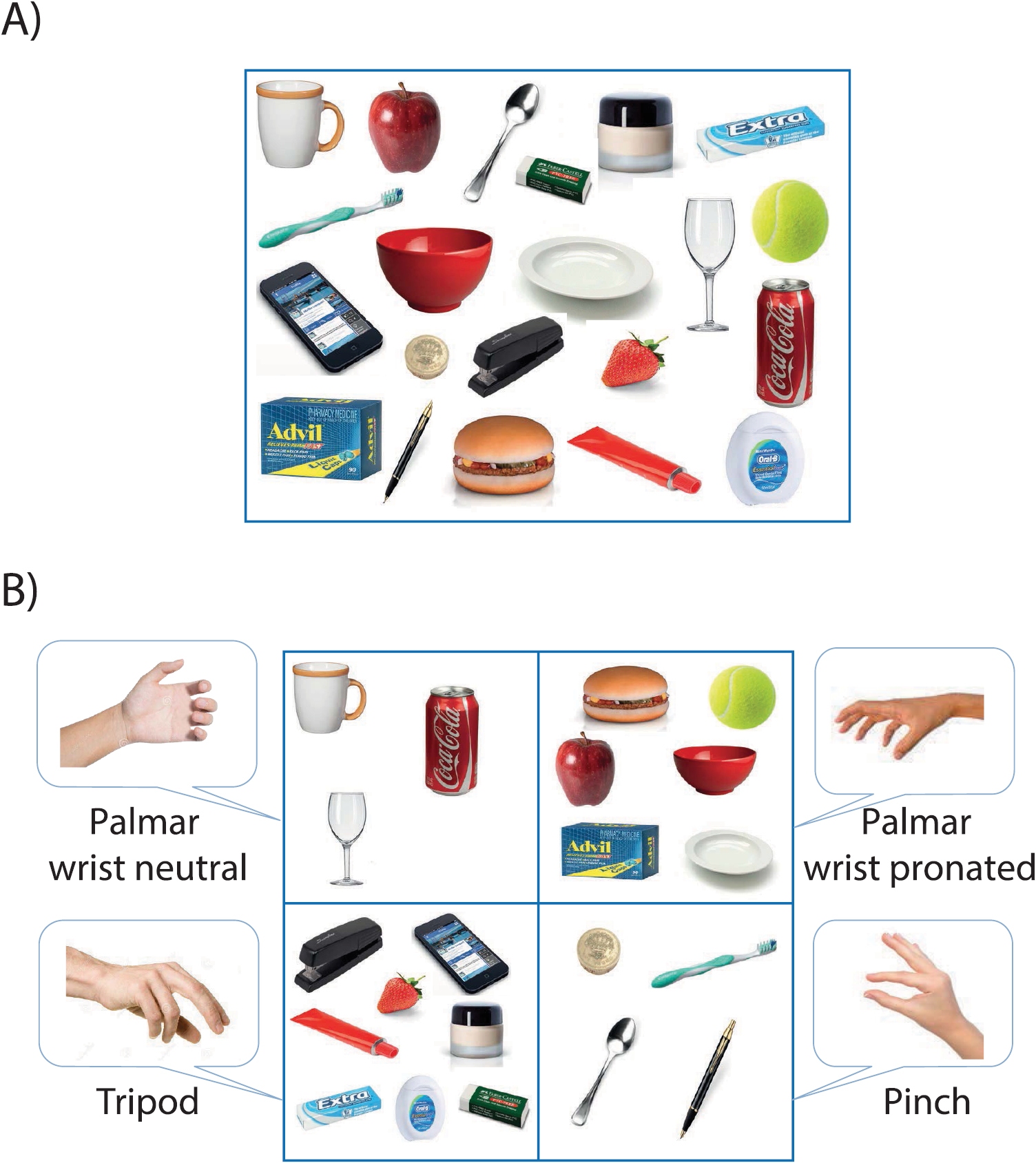 为了进行比较:按对象类别(上方)或四种捕获类型之一(下方)进行分类
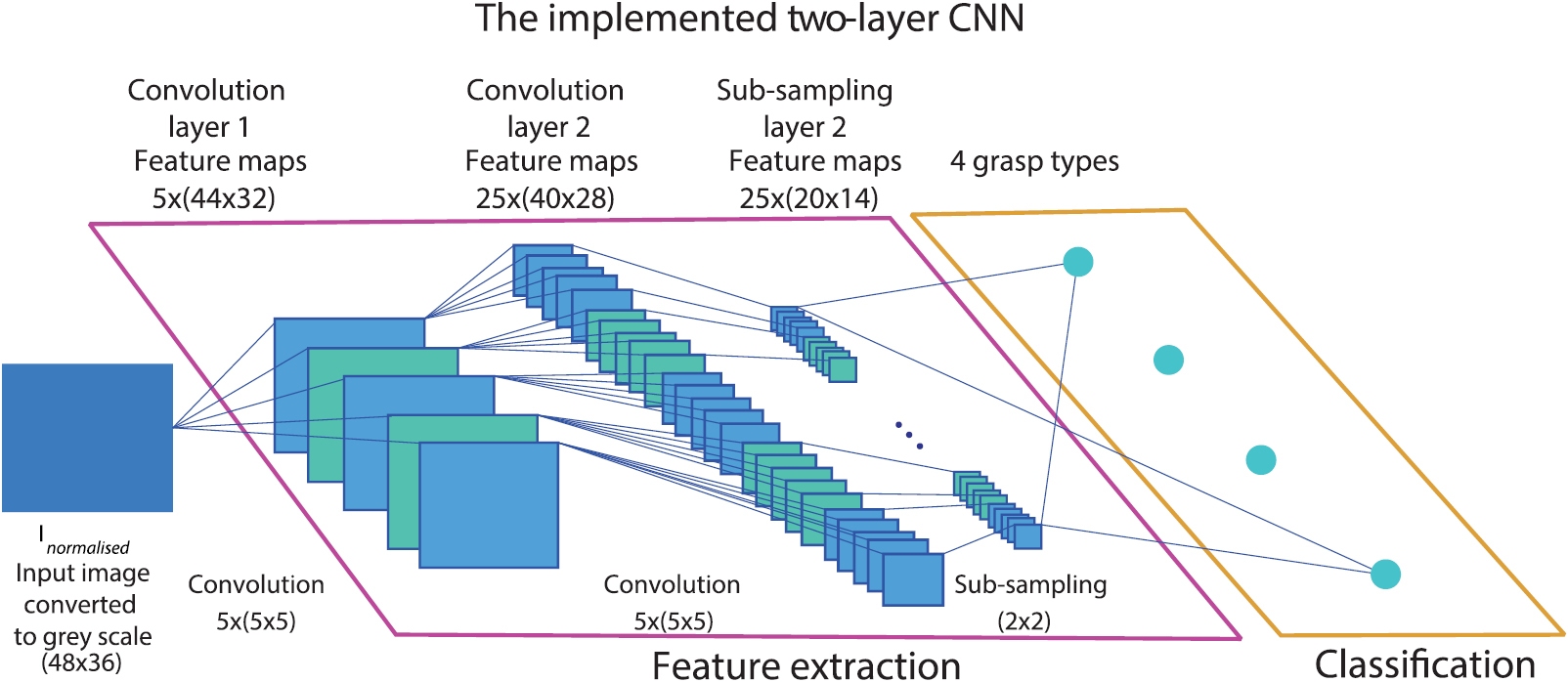
为了进行比较:按对象类别(上方)或四种捕获类型之一(下方)进行分类卷积神经网络用于训练系统。 事实证明,其结构非常适合此类任务,即手的仿生假肢。 例如,其他机器视觉方法遇到不属于任何已知类别的对象时会遇到问题。 但是,识别未知物体是具有机器视觉的仿生假体的最重要特征之一。 因此,卷积神经网络非常适合此类任务。
该系统在
阿姆斯特丹的图像库中进行了培训,该
图像库中存在大量家用物体。
下图显示了用于特征提取和分类的两层卷积神经网络的体系结构。
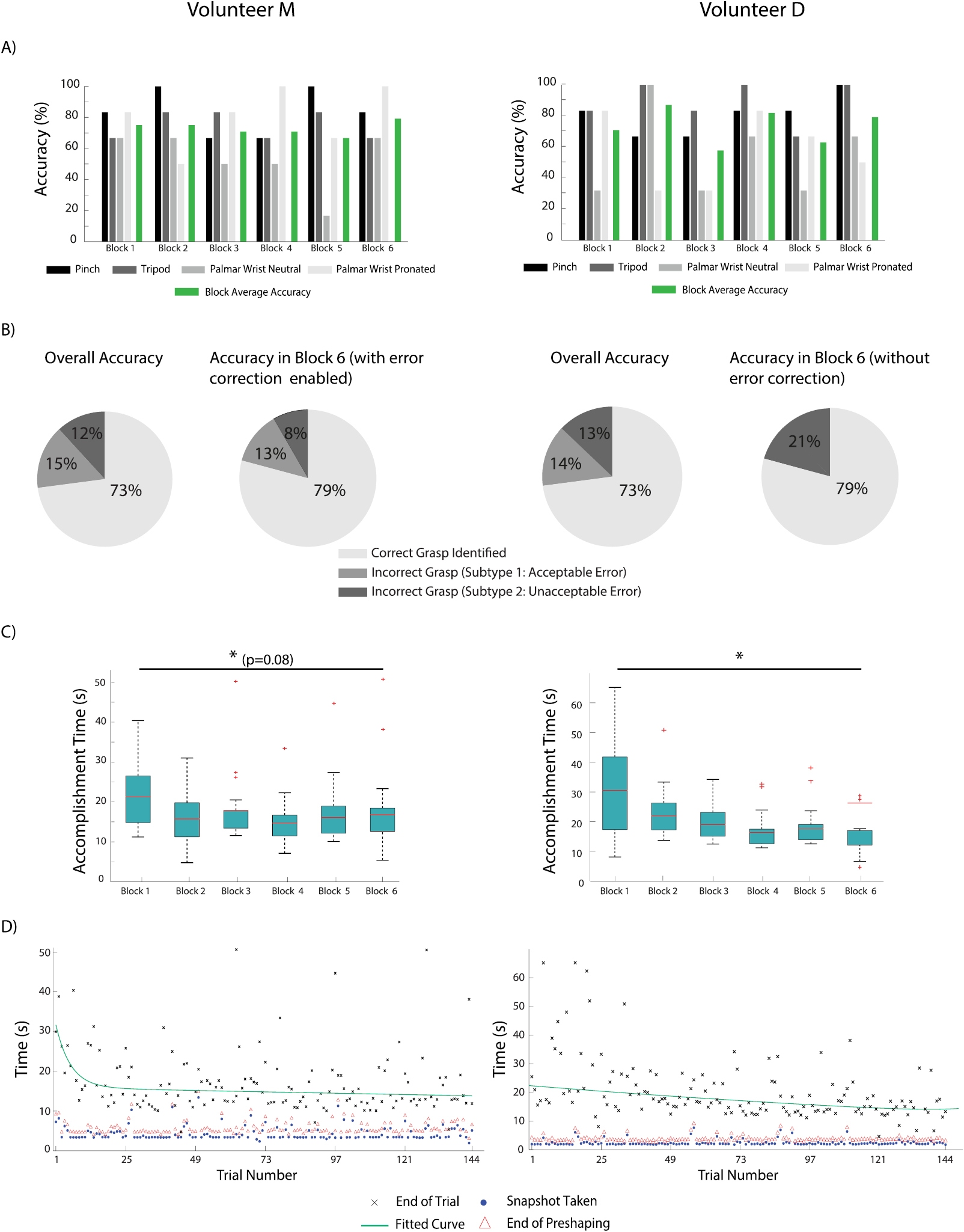
在对具有假肢的真实患者的测试中,系统在随机位置的8个已知和16个未知对象上进行了测试。 左右两张图显示了两名志愿者的结果。 考虑到允许的错误,第一名和第二名志愿者的物体识别和捕获准确度分别为88%和87%。
最重要的是,这种仿生假肢几乎可以实时工作:捕获类型的选择以毫秒为单位,相比之下,仿生手臂需要0.75-24秒,而机器视觉则是对物体进行分类。 即使是这种类型的最佳仿生假肢,
CyberHand和
SmartHand,也可以分别在4秒和1秒内处理识别。 它们运行的是功能强大的计算机,捕获精度分别为93%和94%。 尽管在那里的准确性略高,但是实时捕获或暂停一秒仍是一个很大的差异,因此,英国生物医学工程师的成就不可低估。 这是第一只能够“直观”抓住物体的仿生手,仿佛没有思考。 一个人只需要发出很小的肌肉运动信号就可以捕获该物体,而带有神经网络的智能手可以快速完成其余的任务。
该科学文章于2017年5月3日
发表在《
神经工程杂志
》上 (doi:10.1088 / 1741-2552 / aa6802)。