如果在您不停地飞过窗户之前-不要过早得出结论认为它是愚蠢的。 也许这是一个具有自学习模式AI系统的微型机器人。
 一架无人机坠入周围物体11 500次,沿随机选择的路径飞行
一架无人机坠入周围物体11 500次,沿随机选择的路径飞行如何教无人飞行器沿着给定路线行驶,躲避障碍物? 在室内导航中是否可以没有数字3D地图? 为了解决这个问题,有几种合适的技术,包括
模拟训练 ,其中“老师”教无人机沿着不同的轨迹飞行,并在必要时纠正其动作。 无人机逐渐学习航线。 但是,这种方法显然受到输入数据集的限制:老师不能无休止地陪伴无人机。
近年来,没有老师的机器学习系统开始迅速发展(自我监督
学习)。 事实证明,它们在许多任务上
都很出色:
导航 ,
抓取物体 (在机器人技术中)和
“推/拉”任务 (直观的物理学)。 但是,自学习系统是否能够掌握室内导航这样的复杂任务,并克服模拟训练的局限性?
先前的研究表明,这样的系统确实能够在没有老师的陪练下进行学习,并且训练有素的知识可以转移到现实世界中。 但是实际上,还有另一个问题更相关:在现实世界中,自我教育是否可以在没有模拟器和预编译地图的情况下在任意房间工作? 毕竟,正是每个人在购买机器人并将其带回家时将要面对的任务。 他必须独立研究情况并开始在任何房屋中导航(以前最好将所有易碎物品从房间中移开并隐藏起来)。
来自美国卡内基梅隆大学的研究人员通过将具有神经网络的四轴直升机放置在具有大量房间和家具的最难导航的房间中进行自我训练来设定最困难的任务。 作者强调,其他研究试图简化环境以避免碰撞。 相反,他们希望将无人机推向最大的碰撞和事故数量,以便机器人可以从这种经验中学到东西。 科学家设计了一种自学系统,该系统考虑了这种负面经历以及成功沿着轨道飞行的正面经历。
在机器学习系统的控制下,四轴飞行器AR Drone 2.0在房屋的20个房间中进行了测试-结果,学会了如何有效避免在每个房间中发生碰撞。 培训时间-40个飞行小时。 研究人员说,无人机零件的成本很小且易于更换,因此可以忽略灾难性事故的可能性。
所有碰撞都是完全随机的。 无人机被放置在太空中的任意位置-他以随机方向飞行。 事故发生后,他回到了起点-再次朝随机方向飞行,直到再次坠毁。
直升机以每秒30帧的速度拍摄,事故发生后,将所有帧分为两部分:将具有良好路径的帧置于正组中,将在碰撞之前即刻拍摄的帧置于负组中。 在训练过程中,无人驾驶飞机撞向周围物体11,500次-并组装了世界上最大的无人机事故基地之一。 这种“负面体验”包含有关直升机可能在某处坠毁的所有可能方式的信息。
积极和消极经历的组作为输入传递到神经网络,该神经网络学会了对当前轨迹的特定积极经历是否会导致碰撞样本中出现消极经历的预测。 也就是说,神经网络开始预测要飞往哪里。
神经网络图如下图所示。 卷积层(灰色)的权重是根据ImageNet分类预先计算的,但是在连接层(橙色)中的权重是随机选择的,并且在自学习过程中将最佳值同化,完全基于事故数据。 该图显示了输入数据-来自摄像机的帧(左)和神经网络的输出数据(决定直飞,左转或右转)。

下图显示了一个试验场-进行自我无人机训练的四层楼建筑。
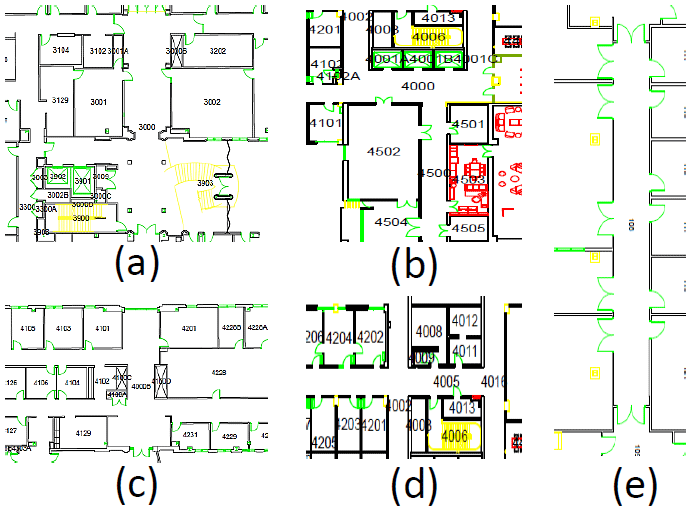
该输出是一个非常有效的无人机导航系统。 一种非常简单的自学方法特别适用于存在大量障碍物(包括移动障碍物,例如人)的房间。
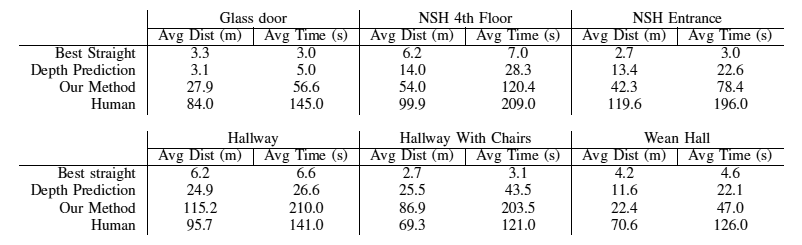
对比测试表明,该导航系统比
采用单眼距离估计的自学系统有效2-10倍。 尤其是区别出现在玻璃墙和没有识别标记的墙壁旁边,这传统上使后者的工作复杂化。
该科研成果于2017年4月19日发布在预印本网站arXiv.org(arXiv:1704.05588v2)上。