今天,我想向您介绍自
上一篇文章发表以来发生了什么有趣的事情,我告诉了我们三个人一年内如何制作水下GPS。
我们实时决定评估水下GPS和真实GPS之间的差异。 甚至不仅是GPS,而且还有GPS / GLONASS组合数据。 如果您对发生的事情感兴趣,欢迎光临!
总的来说,我们已经以某种方式对它进行了检查,但是处于良好的“海洋”状态。 现在,产生了检查实际上所有内容的想法。 在这里,我必须解释,对于任何水声技术而言,浅水体被认为是(而不是徒劳的)最困难的。 一些制造商根本不在浅水中工作,他们说有一个可怕的表层,里面有溶解的气体和多次反射等。
总的来说,我们附近有一个很棒的
水坑这是从岸上看的样子:

它的最大深度约为2-2.5 m,即可能需要导航的更浅的水域,很难想象。
特别为即将进行的实验而购买的是一艘中国的无线电诱饵船-非常适合我们的目的:一艘低速,宽敞的船就够了(在我看来,这有时太多了),可以轻松进行各种修改。
这是船的原始外观:

然后,我们进行了许多改进。 本地电子设备几乎全部保留,仅移动了一点,但复位诱饵的机制除外-不必要地,它已完全拆除。
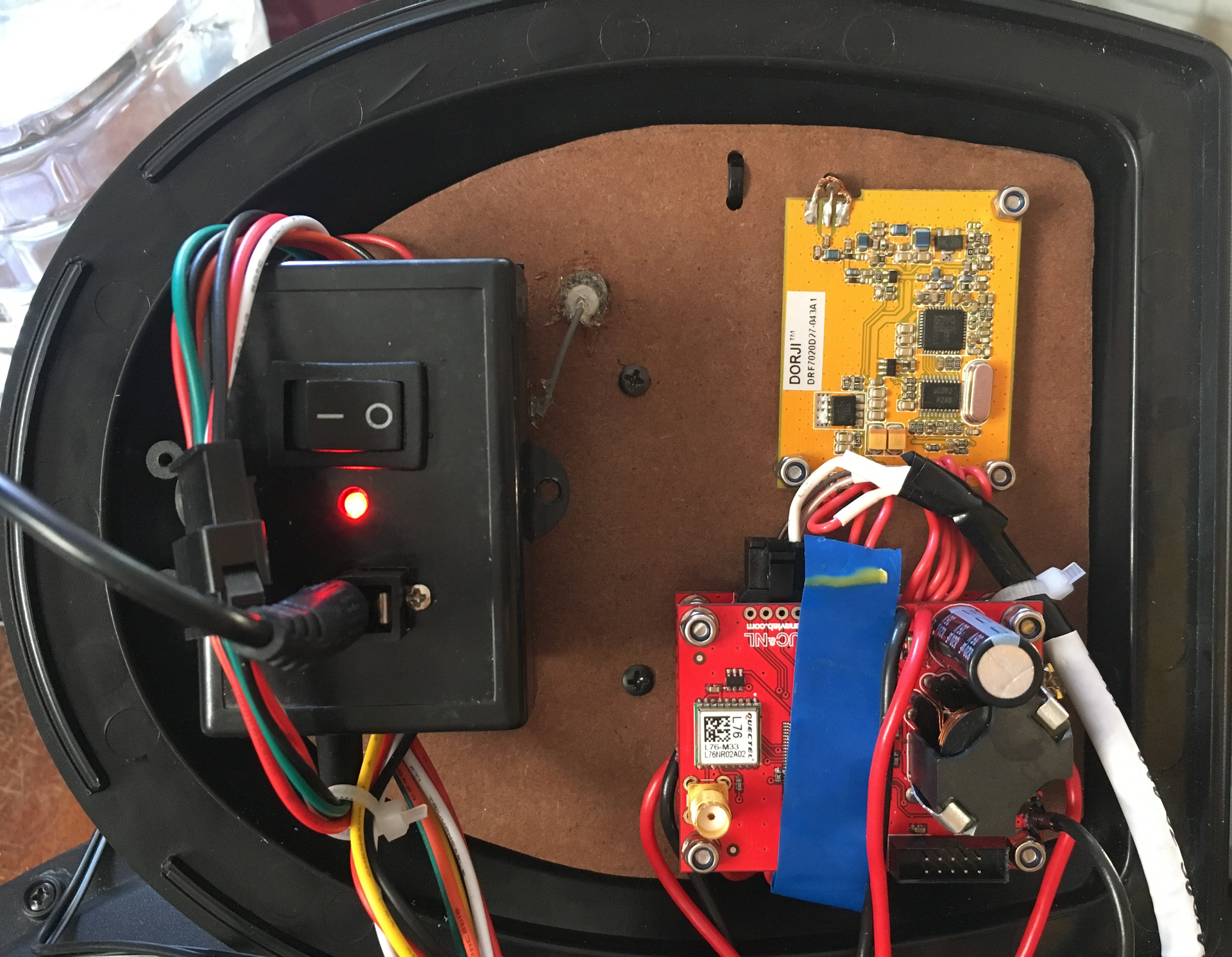
额外安装在船上:
-带有专有GPS / GLONASS接收器的板(照片在硬板面板下不可见);
-433 MHz DORJI无线电模块+天线;
-我们的板载有处理器,用于解析GPS模块,声学导航接收器的输出并通过空中发送整个设备;
-额外的1.5 Ah *铅电池,可为我们所有的消费者供电;
-Bulgin Bucaneer充电接口;
-带有橡胶帽的拨动开关(如我们的浮标),包括我们的所有系统;
-一对简单的电缆入口,导航接收器RedNODE的电缆通过这些电缆插入船内,而声发射器的电缆则被输出(在另一个实验中使用)。
照片中可以看到另一个板-这只是来自另一个实验。
如我在上一篇文章中所述,我们的水下GPS是一种长距离导航系统,并且要在池塘中运行,必须安装四个浮动卫星导航信号中继浮标。 这是长基地的主要缺点-您仍然需要在池塘上放一些东西,这意味着您需要一条船。 但是这次我们想展示如何仅在岸上完成所有工作。
我们有四个人(是的,我们三个人了!),根据这个想法,每个人都随身带了一个浮标,到达他在池塘岸边的那一点,在那里他将浮标从岸上用绳子绑着(这样他们就不会航行了-他们没有乘船) 。
在我看来(第4号浮标)看起来像这样:

在我所在的海岸上,有两种便捷的方法。 我在对岸的两位同事不幸的是,那里只有一片温和的海滩,长满了芦苇,在某些地方被渔民践踏。 结果,从该位置可以看到,必须将3号浮标放置在离其余浮标很远的地方,这仅仅是因为在那个地方接近水很困难。
下面的屏幕截图显示了在实验过程中如何放置(布置)浮标:

顺便说一句,展望未来,我会说浮标的坐标是从导航接收器获得的,而不是直接在陆地上测量的。
该照片非常清楚地显示,在1号和2号浮标之间的条件线的左侧有一个沙洲。 这样一只苍鹭步行到那里步行(她在那里大约一个膝盖),但这一次没有用。
在我的帖子中,对岸像下一张照片一样,坐在左边的人是我们的人,他把1号浮标放在绳子上。

在同一张照片中,我们的船本身在航行过程中可见。
这是它在我们的一个浮标旁边组装的样子:

浮标电缆必须做得更短,方法是用尼龙熨平板将其拉到浮标的承重孔上,否则发射器将仅仅躺在泥泞的底部。 在正常位置,从水的边缘到浮标的声发射器的距离为1.5米。 您还可以看到声学导航接收器安装在足够长的电缆上。 它的长度是1.5米,请记住这一点,将来它将解释结果的一些特征。
自由悬挂的圆柱体对船的运动的影响非常显着。 实际上,已经不雅的3-4米的转弯半径变得可怕:在平静的水中,转弯需要10-15米。 我尝试使船在微风的作用下保持在航线上的尝试将在结果轨道上可见。
说到曲目。 在实验之前,没有100%的确定该系统原则上可以在这种条件下正常工作。 不过,将接收器浸入水中大约一分钟后,我在屏幕上看到了第一点。
我在技术应用程序的屏幕上看到了这样的内容:
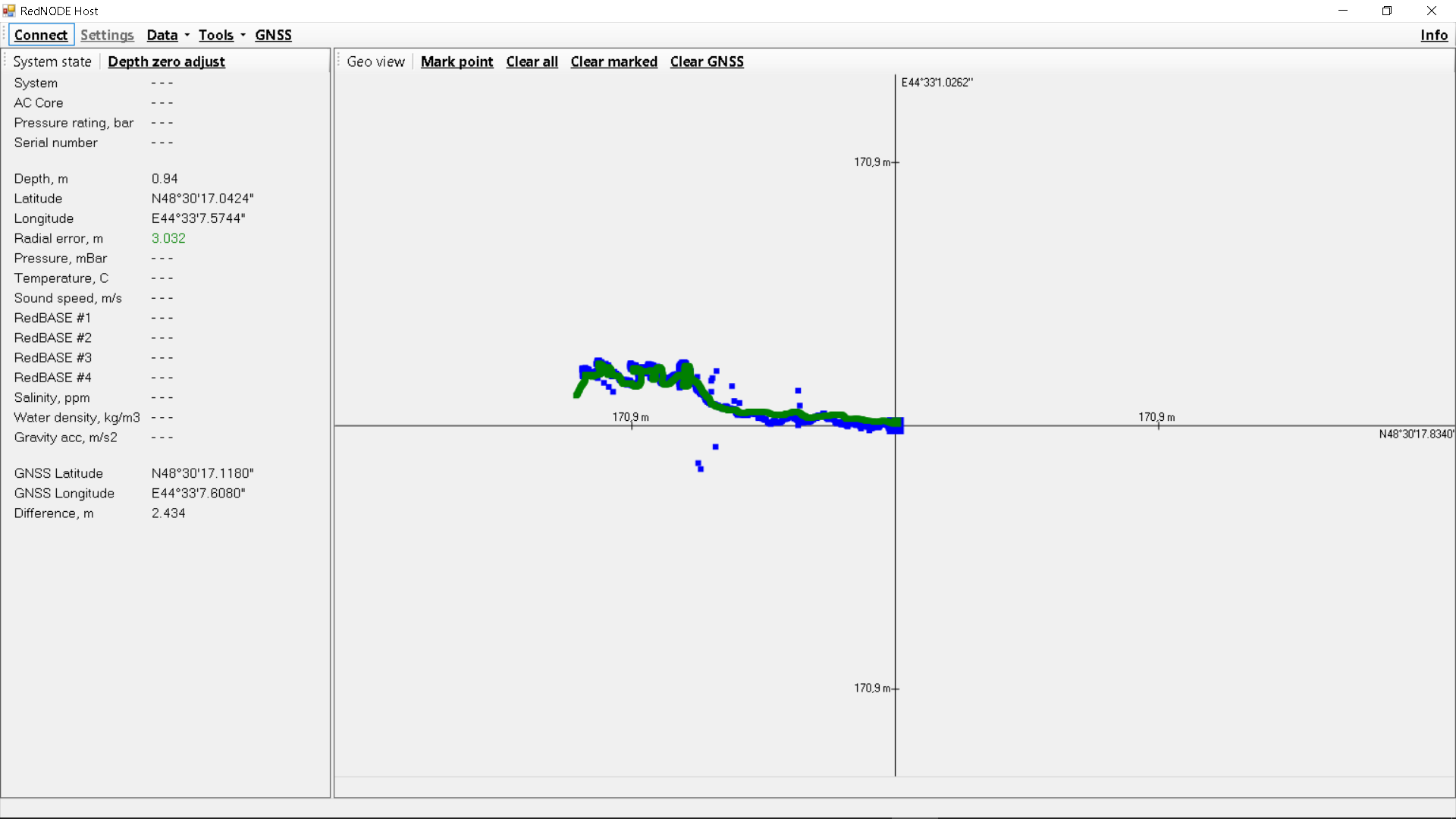
GPS / GLONASS接收器的轨迹以绿色显示,而声学接收器的轨迹以蓝色显示。 左面板的底行显示了根据GPS / GLONASS的当前读数与声学导航系统之间的米差值。 我必须马上说,草率收集的数据“合并器”仅选择了导航接收器传输的部分信息,许多字段仍然为空。
最后,由此产生的辉煌轨迹:
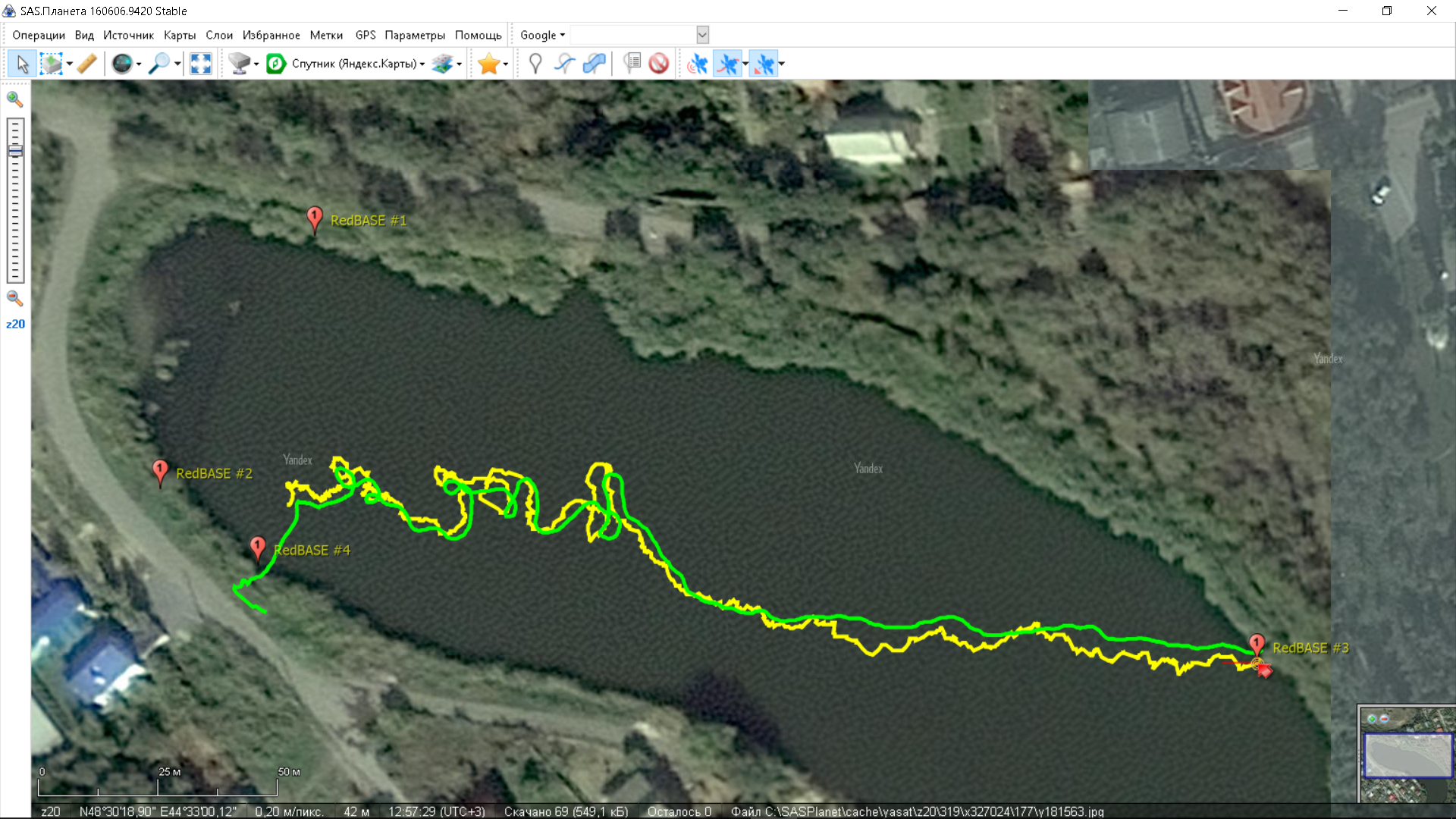
不同位置的轨迹之间的最大差异约为3米,这首先是因为扬声器系统受定位物体的运动对计算位置的准确性的影响更大,这仅仅是因为在接收来自浮标的信号之间她设法移动得足够多,其次,音响导航接收器悬挂在船后方1.5米的电缆上,从而产生了所有后续后果。
使用声音导航系统在船上进行密集操纵的那些部分中使用某些延迟获得的轨迹重复非常有特色。
总的来说,我们并没有计划这么长时间的远足,因为担心船会掉在芦苇丛中,但是在某个时候,我意识到我不太可能安全地部署这艘船,并决定将它顺风而行,这把它带到了我们的浮标上。 3,在安全的地方被我的同事抓住。
实验结果有什么?
-就水文学而言,该系统在巨大的水库中工作
-精度可与地面GPS的精度相媲美
-不需要任何校准
-集成比传统的GPS接收器更复杂
-部署不需要花费很多时间(在我们的示例中,三个浮标在5分钟后进入水中,而第四个浮标又在另一个浮子上10分钟,然后所有这些时间都花在了池塘周围)
使用图片详细显示轨道很不方便,因此我将轨道单独上传,以便感兴趣的每个人都可以对其进行分析:
追踪RedWAVE 12-05-2017谢谢您的关注。
“今天就这些!” (C)
注意! 更新! 事实证明,如果您遵循指向我们
水坑的链接,则可以看到在拍摄该区域时,一架无人机据说正好在我们实验地点的上方飞过:
