
机器人外骨骼被视为工业,身体康复和对老年人的帮助的未来,但是在这方面的进展缓慢。 但是,由于卡内基大学梅隆大学工程学院的研究人员的
发明 ,一切都会发生变化。 他们开发了一种反馈系统,使机器人肢体的运动与人的步调相协调。
在一个小时的时间内,系统会监视承运人的呼吸-并反复更改32种外骨骼模式,直到找到最佳状态。
确定步行时外骨骼电机的最佳功率模式是一项艰巨的任务。 每个人都有自己的步态特征,步态的特征取决于许多条件,包括人在其上行走的表面。 为了解决这个问题,工程师在系统测试不同的时间和功率时使用蛮力方法来找到能够最大程度地发挥新陈代谢作用的最佳模式。 但是要测量新陈代谢的益处,您需要反复测量佩戴者的呼吸,从而减少了在蛮力期间可以测试的设置数量。 即,在这里难以组织最佳的过程。
卡耐基大学工程学院的一组研究人员-Mellon在其
科学文章中描述了一种算法,该算法可在1小时的迭代过程中优化所有外骨骼电机的转矩模式,并实时估算代谢节省量。 外骨骼实际上适应了该人,并跟踪其呼吸。
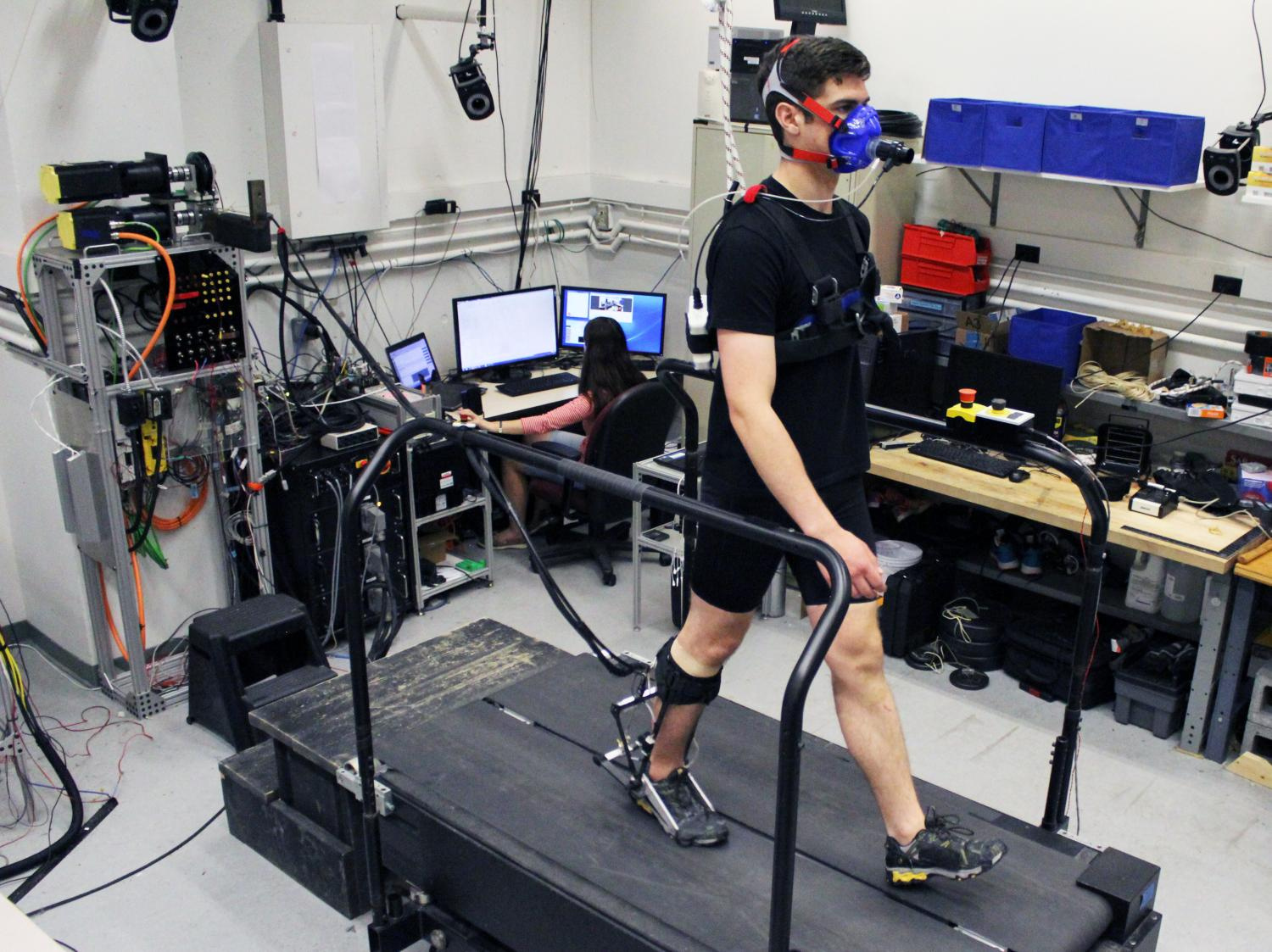
在一个“处于周期中间”的人对几个志愿者进行的迭代系统的科学测试中,与在外骨骼关闭的情况下行走相比,该系统显示出平均代谢节省24.2±7.4%。 也就是说,使用外骨骼时,人的能量消耗减少了约四分之一。 这种减少比其他研究小组获得的结果略好,但是考虑到外骨骼仅用于一条腿,这些数字非常好。
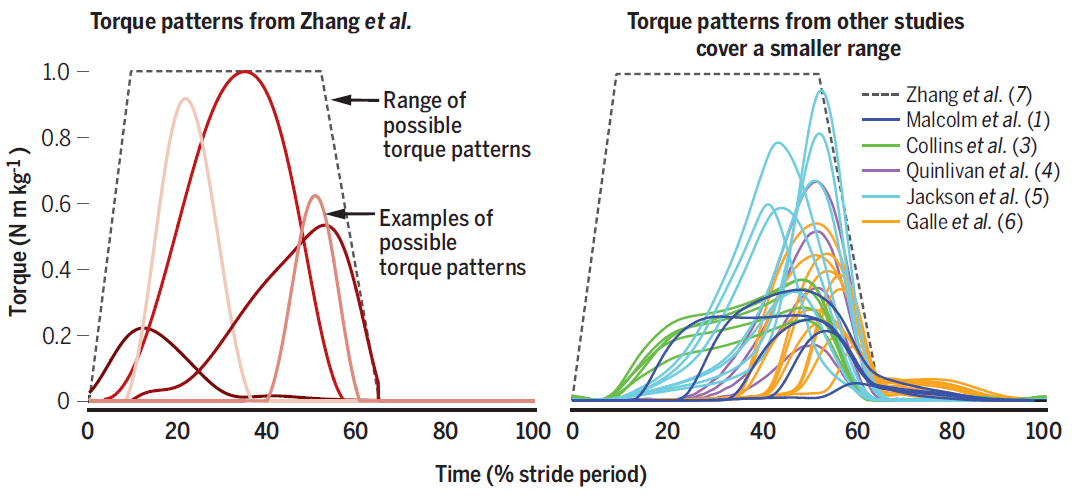
此外,优化算法后,在相同的外骨骼上,结果得到了改善。 但最重要的是,这种训练比使用标准蛮力要快得多,这在其他研究中也得到了证明。 这样,您就可以在蛮力作用下尝试更多种不同的操作模式(参见图表)。
这种交互式的方案可以不断监控人的呼吸(人在回路),使您能够适应一个人的当前状态,适应他在当前条件下的行走。
为什么这种适应步行的方法比其他方法更有效? 自1970年代以来,科学家表明,可变的实践有助于技能的获得。 在此之前,人们认为培训应在恒定不变的条件下进行。 粗略地说,一个人必须多次重复同一件事才能学习并获得技能。 但是没有 事实证明,实践应该是可变的:条件应该改变-因此技能的获取要快得多。 从那时起,可变实践已用于医学,体育和职业培训。 因此,卡耐基大学的工程师梅隆(Mellon)的算法似乎使用了这一原理,这种原理早已被用于教育人们。 此处展示的代谢节省是通过有效的扭矩优化和人为适应过程中分类的各种扭矩模式的组合来实现的。
科学工作的作者建议,通过这种方式可以加速将完整的运动技能返回给受损的患者,例如中风后的患者。 外骨骼扭矩的变化将提供一个可变的学习环境,患者的技能将在此环境中恢复得更快。 这就像在崎terrain的地形上奔跑,比在平坦的跑步机上奔跑要好得多。 一个人不必每天花费相同的精力走路,而必须适应,改变速度和精力:这将是一种真正有效的锻炼方法。

此外,科学家计划自己设定另一项任务。 如果现在的主要目标是在步行时保存新陈代谢的平衡(即节省常规能源),那么将来他们可以为优化设定新的目标:速度。 在过去的几年中,科学研究表明,外骨骼实际上可以提高普通人走路时的速度。 现在该检查是否可以在不损害新陈代谢平衡的情况下进行了。
无论如何,监视步行者的呼吸及其新陈代谢平衡的交互式外骨骼根据给定的程序起作用-这不是未来吗? 即使是健康人也不会拒绝这种设备。 例如,在正常模式下,外骨骼可以使您的步行更加轻松。 但是,如果您开会迟到,请按Turbo键,外骨骼开始在速度优先模式下工作。
该科学文章于2017年6月23日
发表在《
科学 》杂志上(doi:10.1126 / science.aan5367)。