柔性内窥镜旨在爬入人体最难以接近的地方。 不是出于好奇-而是为了患者的利益。 但是,无论外科医生使用内窥镜看到什么,他都无法用同一内窥镜将其取出或切断。 因此,无论从字面意义还是在比喻意义上,您都必须走到另一边,通过割伤人体爬入人体。
哈佛大学的一群科学家决定将内窥镜与机械臂结合起来,以便能够直接“就地”进行手术。 该操纵器具有多种自由模式,以及删除某些物体或组织的能力。 机械手向目标步行时,他躲在内窥镜中。 一旦到达正确的位置,roboruk的角色就会出现。
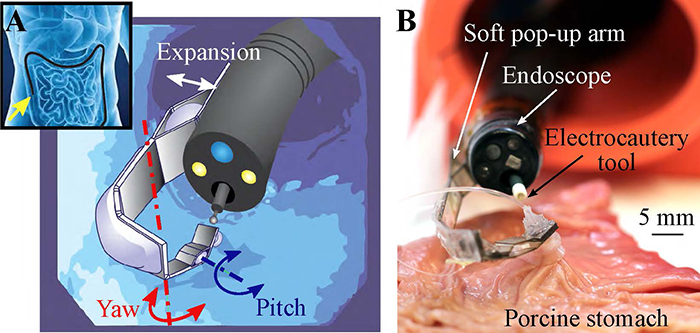 用于描述机械手概念的插图和机器人手臂本身的照片。 在右侧,机械手直接在胃肠道中执行操作。 这些只是“现场试验”,但看起来仍然令人印象深刻。
用于描述机械手概念的插图和机器人手臂本身的照片。 在右侧,机械手直接在胃肠道中执行操作。 这些只是“现场试验”,但看起来仍然令人印象深刻。一般来说,软机器人可以在科学,技术和医学的许多领域找到应用。 其设计的特点是使医生(毕竟,我们所说的是医生)可以在人体内部高效使用它们。 没错,机器人的能力是有限的。
“在毫米级别,软设备实际上会变软,因此它们不会损坏某种织物,但是也无法使用该织物进行操作。 这限制了软微系统在医疗工作中的应用。 问题是,我们是否可以创造出可以在不损害安全性的情况下做出足够努力的软机器人,”该项目的开发商之一汤马佐·兰萨尼(Tomazzo Rantsani)说道。
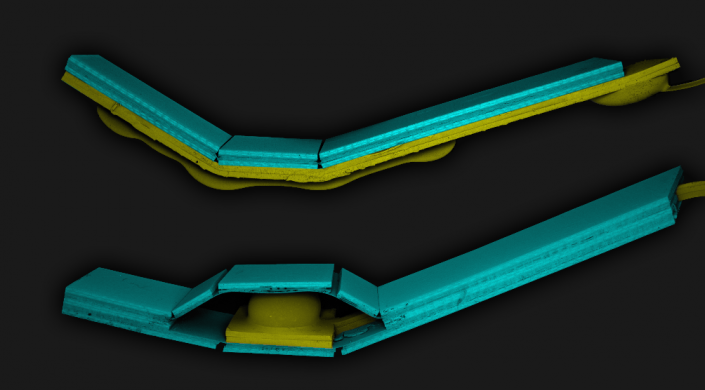
团队设法使用柔软材料包围的足够强壮且有弹性的“骨架”来创建机械手的工作模型。 科学家说,在制作roborouki时,他们会遵循创建折纸纸样的原则。 如上所述,机械手可以达到目标,采取完全不同的形状,实际上是推动机械手。 之后,外科医生可以执行他需要的手术。
为了使整个系统运转,科学家决定使用在水上工作的执行器。 它们使用化学键连接到骨架的坚固组件,因此不需要其他粘合紧固件(或其他类型的紧固件)。 工具列表中有一个机械手和一个吸盘,其工作原理与头足类动物的吸盘相同。 科学家使用猪组织在人工食道中进行了测试。 实验成功完成,机械手在不损坏脆弱组织的情况下进行了操作,一切均以最佳方式完成。
该机械手的最新版本能够执行微型对象的操作,微型对象的大小不超过几毫米。 除其他元件外,roboruk还配备了反馈传感器,因此外科医生在对患者进行手术或检查时,可以了解执行任何手术所需的努力。 这可能是成功操作的条件之一。
将来,专家计划在实际条件下进行手术,但很可能不是在人身上,而是在动物身上。 “我们的技术使我们能够开发出医学所需的小型软机器人。”
软机器人不仅在医学上需要,而且在生产中也需要。 最近,来自中国科学技术大学的科学家
展示了一种看起来像毛毛虫
的柔软的气动机械手 。 顺便说一下,该系统也是与哈佛大学的科学家合作开发的。
这种类型的机器人可以捕获并携带各种物体,甚至是重物,跟随指针并执行其他任务。 将来,中国人计划训练他们的机器人不仅要捕捉,而且要使用工具,将它们转移到一定距离。