第一个可商用的家用水下声导航系统UKB系统
我们不会失去步伐。 自从我们上一篇文章《
水下GPS:延续》发表以来,已经快一个夏天了,今天我将告诉您我们这段时间做了什么。
在关于
水下GPS的第一篇文章中
,我们简要回顾了现有的定位系统,尤其是水下声学。
在削减的范围内,我将讨论如何制作超短基础系统。
因此,在2015年,我们发誓要参与UCB(USBL-超短基线)系统。 这些系统的本质是存在信号源(例如信标应答器)和确定信号到达方向的天线。 相控阵还是简单地说:测向天线。
我们的许多用户以一种或另一种方式谈论了浮子放置程序的相对不便,并且坐标是在“下方”计算出来的(例如在水下GPS中)。
有时,您
总是想将信标固定到定位的物体(潜水员或TNPA / ANPA)上,并通过将USBL天线放到水中来确定相对于水面控制点(船,码头等)的位置。 在易于部署方面,它是最方便,最简单的系统。 例如,在我们的第一篇文章中提到的MicronNAV就是一个典型的USBL系统。 从理论上讲,臭名昭著的NaviMate也曾被设计为UKB系统:一个浮标应定向潜水员,计算其绝对位置并将其传回给他们。
测向天线的事情很普遍。 例如,潜艇具有包含数千个单独换能器的共形天线阵列。 当然,不能说俄罗斯没有人在我们之前完成过UKB系统。 但是,据我们所知,我们的系统是第一个商业上可用的家用系统(通常是最便宜的!)。
但是,在这个宇宙中没有什么是免费的。 为了方便起见,您必须付费。 据我们的同事开发了测向系统操作算法,并且是测向天线固件的作者:
“ UXB用户将享受轻松的部署...。 前10到15分钟。 就像在水域中放置长底系统浮标所需的数量一样多。”
事实是,在长基地系统中估计1-2米到达时间的错误不会带来太多的天气,因为在定位潜水员或机器人的任务中,±1米是完全可以接受的错误。
在UHF系统中,``第一''或``直接''射线定义中的错误将导致确定某些反射(或反射之和-``射线'')的到达方向,但它可能来自任何地方,都取决于特定的水域。 这尤其影响垂直角的确定。 从表面或底部捕获反射,现在您可以在90度范围内使用一系列值,这就是一般的导航系统。
在现代系统(以及我们的系统)中,不考虑垂直角度。 而是,应答器信标具有内置的深度传感器,并可以根据测向天线的请求发送其深度。 此外,了解深度和倾斜范围的差异后,根据勾股定理就可以轻松确定沿表面的距离。
此外,放置天线本身的任务是分开进行的。 从支撑船或码头从电缆上放下时,它会在波浪和水流中悬垂并扭曲。 因此,如果在天线坐标系中确定了信号的到达角度,并且该角度是不稳定的,则这种不稳定性会传递到所计算的定位对象的位置。
通常,为了避免此类问题,将天线安装在杆上。 尽管我们的天线具有集成式AHRS,但我们也这样做。
我们将系统命名为Zima。
我们计划在不久的将来发布称为Zima blizko的改进版本我们的系统由Zima-B(ase)最具定向能力的收发器天线组成。 可以在下面的照片中看到。
 图1-Zima-B-测杆安装在杆上
图1-Zima-B-测杆安装在杆上信标响应器Zima-R(响应器)既可以独立运行,也可以配备电池组(如照片中所示),并且可以与载体连接。
在这种情况下,用户可以使用我们的所有创新和便利设施:
-能够传输多达32个遥控命令
-相互测量到测向天线的距离
-将方位角传输到基站(如果媒体上有确定向北方向的设备-普通人中的指南针)
应答器信标与我们的水下GPS接收器RedNODE具有相同的外形尺寸。 如前所述,它具有内置的压力/温度传感器,适用于0-30 Bar的范围,并允许获得高达0.05 m的深度和0.1度的温度精度。 顺便说一下,天线也配备有相同的传感器,因为通过电缆测量深度在某种程度上不是创新的。
 图2-Zima-R-信标应答器(带电池)
图2-Zima-R-信标应答器(带电池)我们于今年8月3日在流入伏尔加格勒水库的地方附近的伏尔加格勒地区的Pichuga河上对该系统进行了常规测试。 这是我们最喜欢的“训练场”,我们亲自了解所有凹坑和轮廓元素。
在7月下旬和8月初,天气通常很热。 蓄热层上出现加热的上层(发生
温跃层 ),水开始开花,通常情况变得困难。 只是在这种情况下,需要测试设备。 毕竟,没人会对您在完美淹没的测量池中获得的特性感兴趣,每个人都在真实的水体中工作。
大气工作时刻的照片:
 图3-工程总监,USBL系统首席设计师,研发总监(从左到右)=)
图3-工程总监,USBL系统首席设计师,研发总监(从左到右)=)一个天线可以与23个转发器一起工作(尽管我很难想象这样的任务,但是仍然可以)。 信标由代码分隔,并且与每个信标的工作顺序发生。
下图显示了主机(远程控制软件)的屏幕截图:
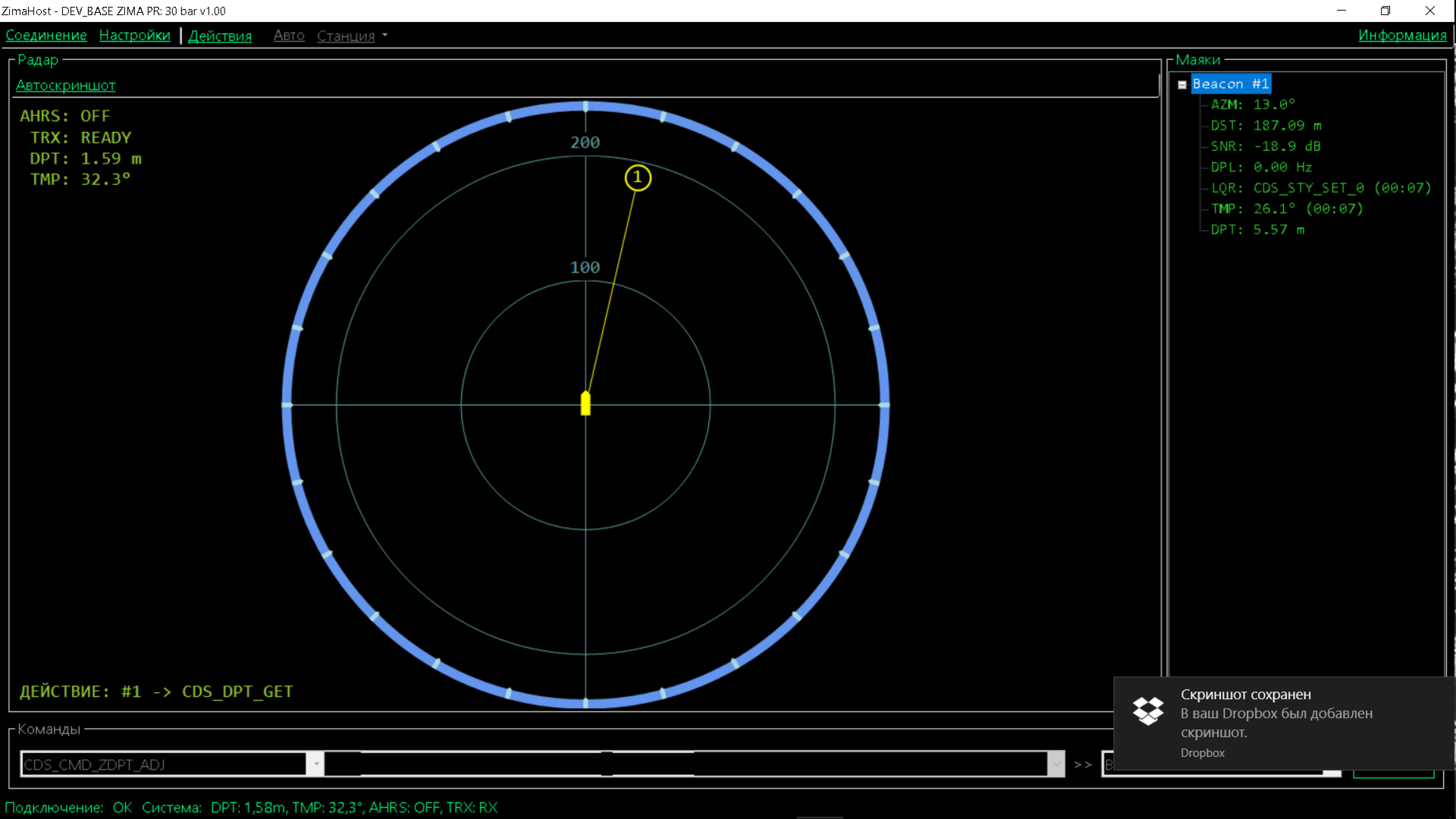
图4-Zima USBL主机的屏幕截图
天线通过UART-USB适配器连接到PC。 按照传统,我们使用类似于NMEA0183的(开放)协议,并且主机的所有源代码都在
github上打开。
请注意:屏幕截图显示灯塔位于5.5米的深度,其传感器上的水温为26.1°C(!),而天线本身悬挂在离表面一米半的天线上,则为32.3°C(CARL!),位于该区域的位置深度约为15-20米。
从外部设置来看,系统仅需要盐度(根据深度和温度的读数确定盐的速度)和最大距离(据此计算信标响应的最大等待时间)。 根据我们的方法(正在申请专利的方法),灯塔还可以确定到天线的距离,并支持从基站远程设置水盐度的功能。
最后,我们在本实验中获得的最有价值的东西(晒黑除外)是主机的7分钟视频(屏幕截图):
ZimaHost-视频让我解释一下,灯塔是固定不动的-在锚和浮标之间伸展,并且安装在杆上的天线从(橡胶)船的侧面悬挂。 可以说是相对移动的相对性:灯塔以100米以上的半径快速转动一圈,这实际上是由船的旋转以及天线的旋转引起的。
我们总是有话要说。 如果有些事情令人难以理解或披露不充分,请在评论中欢迎。 我和我的同事会整理一下。
PS在这些测试中,我们不仅测试了Zima系统,还测试了其他一些有趣的小工具,我将尽早编写这些小工具。
等着你:
- 蓝藻700米后总统的声音
- 给潜水员打电话的理由
- 谜语图片(现在!)
尝试从照片中猜出它是什么设备以及为什么需要它: