古老的技术激发了未来全地形车在500°C的环境下运行多年的灵感。
航天器在金星表面的最长停留时间为127分钟。 1982年3月1日,苏联的“
维纳斯13号”探测器被降落伞整齐地降下,能够工作了两个多小时,原因是计算机的所有组件都隐藏在密封的钛制机壳中,该机壳先前已在轨道上冷却。 金星表面的平均温度为464°C-高于水星(最靠近太阳的行星)表面的温度,并且温度很高,以至于常规电子设备无法工作。
温度不仅使金星成为计算机的不愉快地方-表面的压力为90个大气压,这相当于海洋中900 m处的压力。 如果您确信金星大气层上部的硫酸雨没有到达地表,请知道那里太黑了(就像地球上最多云的日子),太阳能的提取效率极低。
 苏联探测器“维纳斯13”的表面照片下降到维纳斯,在那里工作了两个多小时
苏联探测器“维纳斯13”的表面照片下降到维纳斯,在那里工作了两个多小时使金星表面变得令人不愉快的闷气在最大限度地减少我们在轨道上可以收集的表面数据量方面做得非常出色-因此,如果有一个机器人在那里为我们寻找一切,那将非常非常好。 与维纳斯表面研究有关的大多数想法与苏联的探测器几乎相同:将电子设备固定在一个绝热容器中,该绝热容器与功能强大的空调系统相连,并可能由斯特林放射性发动机提供动力,并以p为燃料。 研究和开发这种系统将耗资数十亿美元。
金星的全地形车的传统方法困难,昂贵且危险。 但是,位于宾夕法尼亚州帕萨迪纳的NASA喷气推进实验室JPL的工程师团队。 加州提出了一个创新的想法来研究金星的表面。 如果问题出在电子领域,为什么不排除它,而制造出一款机械式全地形车?
在NASA的高级创新概念(NIAC)计划的资助下,JPL团队想知道是否有可能在没有传统传感器,计算机和电源的情况下制造出全地形车来探索金星。 AREE用于极端环境的Automaton Rover可以使用时钟齿轮,弹簧和其他机制来提供全地形车的大多数功能,包括动力,储能,传感,运动和通信,而无需任何电子设备。 加热
 在Voskhod航天器上使用的Globe位置指示器内
在Voskhod航天器上使用的Globe位置指示器内在电子设备超负荷的世界中,我们大多数人都不了解机械计算机可以做什么。 两千年前的一个世纪左右,古希腊人构建了
Antikythera机制 ,能够计算太阳和月亮的位置,显示月相,预测月食,跟踪日历周期,并可能使用一组30个经过精确校准的青铜来显示五个行星的位置。齿轮由带手柄的轴驱动。
在17至19世纪,Blaise Pascal,Gottfried Leibniz和Charles Bebbage开发了能够进行各种算术计算的机械计算机。 在近代时代,在1940年代,机械计算机被积极地用于苛刻的实际目的,例如管理火炮射击和投下炸弹。
直到2002年,俄罗斯人才使用
Globus机械计算机来计算航天器的位置,但总的来说,现在一切都在电子设备上完成。 没关系,但在金星上不行,因为在金星上使用大多数电子设备是不切实际的。
用于AREE的JPL概念是创建具有最少电子设备的机器人,并且在很大程度上依赖可以在数周,数月甚至数年的高温下正常工作的机械系统。 乔纳森·索德(Jonathan Sauder)是JPL技术引进小组的机电技术专家兼工程师,也是AREE项目的负责人。 我们与他交谈以更好地了解该项目是如何开始的以及一切将如何进行。
您是如何提出AREE的想法的?
乔纳森·索德(Jonathan Sauder):我们与一群工程师坐在一起,参加了一个并行的开发会议。 在一次茶歇期间,我们讨论了凉爽的机械装置和组件,以及制造完全机械的太空飞船的凉爽程度,外观和使用位置。 我们意识到在电子无法幸存的两个地方使用这样的东西将是有意义的:一个是金星,因为我们在金星表面可以生存的最长时间是两个小时,第二个是木星,因为放射性环境破坏电子设备运行的环境。
是否可以制造没有电子设备的全地形机器人车辆?
在NIAC项目的第一阶段,我们提出了一种构想,即制造一种完全不使用电力或电子设备的全机械全地形车,并用机械计算机代替所有标准的电子子系统。 开始研究这个问题后,我们意识到我们无法使用集中处理器来构建像Curiosity这样的传统全地形车。 我们需要集中精力于一种更分布式的体系结构,在该体系结构中,一个设备中有许多简单的机制可以对其进行控制,发出信号并告诉他要去哪里。
首先,我们想使用力学进行一些科学的测量。 我们开始处理此问题,并意识到我们无法产生足够准确的数据来创建图像或测量温度和压力等参数。 基于高温的碳化硅和镓基高温电子产品有多种选择。 问题在于它们很难集成。 事实证明,在他们的帮助下,不可能组织传统的电气系统,并且至少无法满足创建全地形车所需的要求。 因此,我们决定创建一个移动平台,该平台能够移动,探索新的地方并且能够比现有系统工作更长的时间。
 腿部早期AREE概念
腿部早期AREE概念是什么开始了AREE的发展?
主要目标是创建具有最高可靠性的移动体系结构。 第二个目标已经是使用尽可能多的简单分布式机制,这些机制可以响应外部因素的影响,这些外部因素可以使全地形车沿着金星表面行驶。 请注意,在早期图像中,全地形车与Strandbeest(
特奥·詹森 (
Theo Jansen)的“行走动物”)非常相似,后者是沿着荷兰海滩行走的动感雕塑。 Strandbeest与一对简单的传感器一起工作,这些传感器控制着腿向前或向后的运动,并且内置逻辑有助于避免软沙和水。
在开发该概念的早期阶段,我们直接与Jansen合作:他来到JPL进行了为期两天的合作,而我们从他那里获得了与Strandbeest合作30多年的经验。 他的第一个技巧是放弃双腿。 而且,您知道,当Strandbeest的创建者告诉您,金星上的全地形车不需要腿时,这意味着您确实需要提出其他建议。 关键问题是,当您将腿移到更多样化的表面(例如未知的金星环境)时,在平坦的软沙滩上完美工作的腿会变得不稳定,这会增加政变和损坏全地形车的可能性。
结果,我们的架构从第一阶段过渡到了第二阶段,从看起来很酷的有腿的全地形车到看上去更酷但更可靠,更实用的全地形车,它看起来像第一次世界大战的坦克。
 第二阶段的概念,带有轨道和集成的风力涡轮机。 有可能发生的政变,全地形车仍然可以移动。
第二阶段的概念,带有轨道和集成的风力涡轮机。 有可能发生的政变,全地形车仍然可以移动。您能描述AREE如何在金星表面移动吗?
我们开发了专门的系统来避免障碍物并确定运动所需的能量,而不是通常的集中式系统,该系统允许全地形车执行多个过程或使用软件重新配置全地形车。
我们正在尝试尽可能简化这些机制,以使每个人都能执行自己的特定任务,但执行得很好。 全地形车与物体的碰撞也许会抛出操纵杆,从而导致操纵杆向后移动一点,转90º,然后再次前进。 我们只能有一个避障系统,但是这种动作可以重复很多次,因此可以用来绕过障碍物。
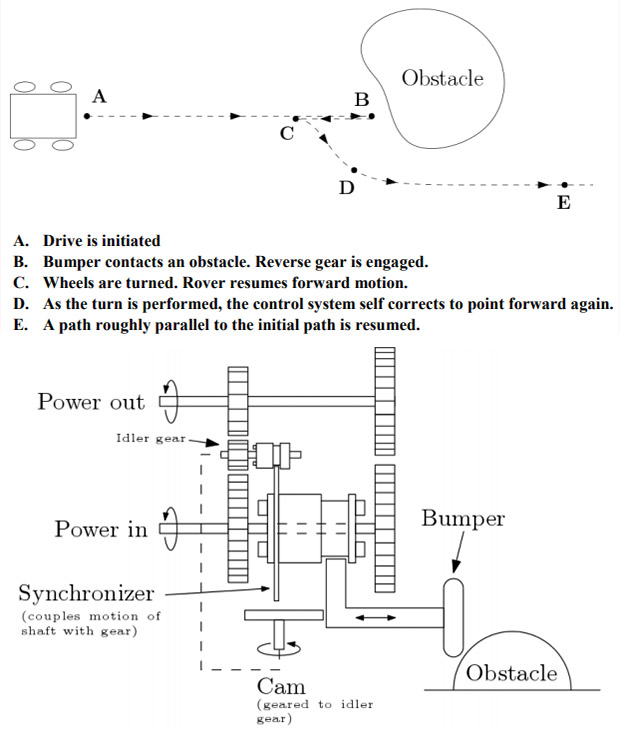
避障系统使用保险杠,带齿轮的齿轮和偏心轮。 她能够在反冲后收回全地形车,然后重新接合保险杠和变速杆,并继续前进。 在正常向前运动期间,力从输入轴通过图右侧的齿轮传递到输出轴。 其余齿轮将自由旋转。 当遇到障碍物时,同步器接合倒档,这导致相反的效果。 凸轮完全旋转后,它将把保险杠移回前部位置。 相同的偏心轮可用于使全地形车的车轮在发动机倒档时转动。
与金星全地形车的其他项目相比,AREE的哪些功能是独特的?
如今,有几种金星任务的概念,每一种的成本都可以与火星好奇号相提并论,并且可以在一处或两处着陆。 大多数建议都非常复杂,设计要在表面上工作2到24小时。 我们计划工作一个月,这就是我们的主要创新工作的地方-能够探测金星表面许多地方并了解其随着时间变化的能力。
您能否描述完美的AREE如何满足您的期望?
理想的机器人将能够在维纳斯最困难的表面上工作,该表面称为“
镶嵌” ,该表面是粗糙的石质熔岩,其顶部类似于镶木地板或瓷砖。 我们的目标是在这样的表面上进行全地形飞行,以获取有助于我们了解金星演化的地质样本。 理想的全地形车的尺寸应略大于1.5 m-现在,此限制是由隔热罩施加的。 如果可以的话,将其增加到2.5 m,以便它可以克服更大的障碍并从风中接收更多能量。
因此,您需要制造一种可以克服大部分障碍的全地形车,这些障碍会缓慢但确实地向前爬行并逐渐爬行,并收集样本和天气数据。
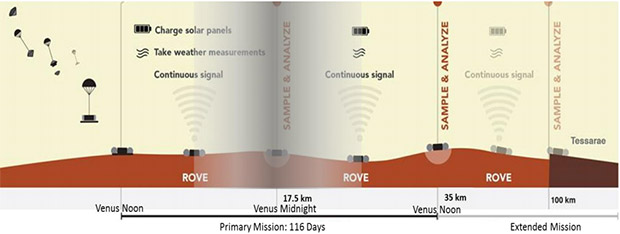 穿越平原前往苔丝的概念。 在任务的主要部分(持续116天)(维纳斯日循环)的整个过程中,全地形车将覆盖35公里。 扩大后的任务将使他在三年内覆盖最远100公里的距离。
穿越平原前往苔丝的概念。 在任务的主要部分(持续116天)(维纳斯日循环)的整个过程中,全地形车将覆盖35公里。 扩大后的任务将使他在三年内覆盖最远100公里的距离。* * *
在这一点上,您可能已经开始想知道-如果我们不能从他那里得到消息,为什么我们要发送一辆时髦的全地形车来研究金星的表面-因为如果没有电子设备,他怎么能给我们发送任何数据? 有多种方法可以机械地存储数据-临时存储数字非常容易,并且可以在金属留声机上输入大约1兆字节的数据。 好吧,接下来呢?
一种想法(看上去并不像乍看上去那样疯狂)是使用氢球将金属记录提升到金星的高层大气,在那里它们将被高空太阳能无人机拦截,读取并将其内容传输到位于轨道。 研究人员也在考虑带电子管的收音机的选择,但是尽管这些管能够在高温下工作,但它们在金星大气中将很脆弱,并且将面临密封性的损失。
但是AREE开发人员提出了另一个想法:雷达反射器。 可以从轨道上看到安装在全地形车上的雷达反射器,并且通过在反射器的前面放置一个百叶窗,将有可能在每次卫星通行时发送约1000位信息。 通过添加多个具有不同反射率的反射器以及以不同频率运行的百叶窗,您每天最多可以传输32个唯一变量。 此外,在某些情况下,甚至无法传输某些数字-例如,通过将风扇放置在反射器的前面,可以测量表面上不同位置的风速。
现在,已经制造出了一种具有独特功能和可靠性,能够在金星上生存的全地形车,您需要了解它可以进行什么样的科学研究-这对于AREE来说是一个特别困难的问题,正如NIAC竞赛第一阶段的提案中所述:
纯机械系统的主要弱点之一是科学研究的潜力。 除了通讯之外,科学仪器还是高温电子设备将有用的关键领域。 更复杂的测量,尤其是地质测量,需要电子解决方案。
去年年底,美国宇航局宣布了一项高温技术计划HOTTech计划,该计划资助“用于对温度接近或超过500摄氏度的高温环境进行自动化研究的尖端技术”。 AREE希望,由于HOTTech的出现,将有可以在其全地形车上生存的科学工具-但是,要获得不同的结果,他们有一些有趣的想法可以在没有任何电子设备的情况下进行科学研究。 例如,使用涡轮测量风速,使用从温度扩展的材料测量温度和压力,以及使用对某些化学化合物有响应的杆来测量化学性质。
 风能存储在复合弹簧中。 图中的机械系统能够测量弹簧中存储的能量,并在充分积累能量时使用离合器将能量传递给运动系统。 如果您希望全地形车辆在一定时间后或达到其他条件时移动,则可以添加对手表或其他传感器做出响应的机械逻辑门。
风能存储在复合弹簧中。 图中的机械系统能够测量弹簧中存储的能量,并在充分积累能量时使用离合器将能量传递给运动系统。 如果您希望全地形车辆在一定时间后或达到其他条件时移动,则可以添加对手表或其他传感器做出响应的机械逻辑门。Sauder和团队并非只是出于娱乐目的而尝试创建所有这些机制。 探索金星超过一两天的间隙是一项非常重要的任务。 索德说:“我们的目标不是重现已经完成的工作,也不是在高温电子领域将很快成为可能,而是为那些尚无明确解决方案的领域提供一套机械解决方案。”
作为AREE项目一部分而开发的技术不仅可以用于太阳系的其他地方,而且不仅可以用于辐射高的地方,例如欧洲,木星的卫星之一。 在地球上,AREE可以方便地收集活动火山附近或高辐射区域的样本。 AREE的另一个优势是,它可以在高温下完全消毒,而不会完全损害功能。 假设如果在火星极地帽下有一个湖,湖中有一些不寻常的生命形式,则可以发送无菌AREE进行样品收集,而不必担心污染。
现在,AREE已获得NIAC第二阶段的资金。 团队正在研究运动系统的更详细的开发,这很可能导致某些轮子替换履带,从而更加可靠。 他们还开发了可以在高温下操作的机械表,这是自动机械计算机的主要部件之一。 索德说,他们希望通过全年的构建和测试雷达信号传输系统获得有趣的结果。 我们对此也非常感兴趣-这是我们所见过的最具创新性的机器人之一,我们迫不及待地想知道它在金星上的作用。
由SREE领导的AREE团队还包括Evan Hilgeman,Michael Johnson,Aaron Parnes,Bernie Bienstock和Jeffrey Hall [Evan Hilgemann,Michael Johnson,Aaron Parness,Bernie Bienstock,Jeffery Hall]。 Jessie Kawata和Kathryn Stack是第一阶段最终报告的其他作者。