科幻小说充满了飞行机器人。 还有以人的形象创造的飞行类人机器人。 这些是自主机器和外骨骼,就像钢铁侠一样从内部进行控制。 但实际上,我们还没有看到这样的机器人。 有多功能直升机,但他们不能像一个人一样在地面上行走。 意大利技术学院的工程师决定纠正这一缺陷-他们开发
了iCub飞行人形机器人的
体系结构,该机器人具有四个喷气发动机和一个控制系统。
这是世界上首批能够飞行,行走和操纵物体(即用操纵器捕获物体)的机器人之一。
传统上,类人机器人被视为在地面上移动的地面机器。 但是意大利科学家确信,如果将喷气发动机添加到这样的机器人中,那么它的使用范围将会大大扩展,因为它将具有更大的自由度。 如果将我们与传统的无人飞行器进行比较,那么有时它们还会配备可以捕获物体的操纵器,但同样,类人机器人比它们更具有优势,因为它可以在地面上行走。 这增加了系统的可靠性和能量效率。
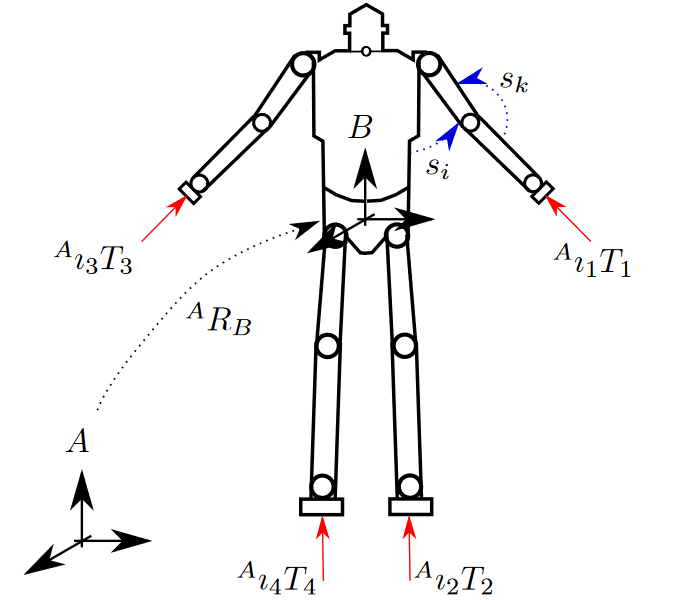
在意大利技术学院的项目中,终端执行器上安装了四个喷气引擎,即机器人的“臂”和“腿”。 发动机的这种布置似乎有些不自然,但实际上,这种多峰回路已经在其他设计中进行了测试。 工程师说,考虑到机器人支撑框架方向的微小偏差,它可以使相对于质心的计算轨迹稳定。
意大利的发展远非实际执行。 开发人员称其为“创建飞行人形机器人的第一步”,而这实际上只是第一步。 工程师所做的是开发一个基本框架,用于在空中悬停和平稳移动时控制iCub机器人的
仿真 。 发动机推力也在模拟程序中计算,并在控制系统的计算中予以考虑。 这项工作证明了这种机器人的创建及其控制在
理论上是可能的,尽管开发人员并未考虑空气动力学效应和其他可能在机器人的实际操作中表现出来的因素。 一切都会有时间-这种计算和实际飞行的第一个实验都将在以后进行,但是现在的任务是确保从理论上控制这种机制在空中的运动是可能的。
该视频显示了机器人如何在一个地方冻结,还计算了其质心的所需轨迹。
iCub的一位开发人员Daniele Pucci告诉
IEEE Spectrum ,四年前他加入意大利技术学院时就曾想过要制造这样的机器人。 然后,他考虑了如何将其在无人机控制领域的发展应用于具有各种“身体部位”(即不是完全刚性的身体)的机器人。
丹尼尔·普奇(Daniele Pucci)认为,类人型飞行机器人比配备了机械手的常规多轴直升机具有许多优势。 后者经常在大风天气中遇到问题,因为它们不能牢固地站立在地面上,因此在试图捕获静止物体时需要进行更精确的控制。 而且,类人机器人具有两个操纵器,而不是一个,这进一步简化了任务。
另一个优势是社交。 将来,按照钢铁侠的形象,这样的机器人确实可以用作人类的外骨骼。
理查德·布朗宁 (
Richard Browning)拉外骨骼的例子表明,这种发明是有需求的-实际上,我们当中谁不想在喷气发动机的铁壳上飞行?
 理查德·布朗宁(Richard Browning)在地上盘旋一米
理查德·布朗宁(Richard Browning)在地上盘旋一米该科学文章已于2017年2月16日在预印本网站arXiv.org(arXiv:1702.06075)上发表,并提交发表在《
IEEE机器人与自动化快报》杂志上 。