
在我们的出版物的较早版本中,我们反复
提出了在电信中使用直升机
的话题。 关于此主题的一些案例
研究已出现在我们的博客中。
但是,今天我们将重点关注直升机在组织无线网络中的使用。 这已经被说了不止一次了,我记得Facebook将在无人机的帮助下在整个地球上分发Internet。 他们还计划在紧急情况部使用无人机,例如在组织短期无线电覆盖范围,组织各种救援行动或其他事件时使用无人机。 通常,在所有需要快速部署无线网络的情况下。
在此材料中,我想介绍一下外国专家的
研究 ,该研究清楚地证明了以无人机作为接入点的实验结果。
关于实验装置的方法和功能
英特尔Galileo主板用作系统的主要元素。 该板基于32位Intel Quark SoC x 1000 CPU,时钟频率为400 MHz。 使用的软件是Linux quark 3.19.8 yocto-standard。 电源是10400 mAh电池,能够为Galileo提供长达15小时的电池寿命。 英特尔双频Wireless-AC 7260卡通过PCI Express端口连接至Galileo主板,该卡能够提供高达867 Mb / s的数据传输速率。 它适用于多种Wi-Fi标准(802.11a / b / g / n / ac)。 卡上连接了两个增益为5 dBi的外部天线。 伽利略板,电池和整个天线部分的总重量为340克。
实验的第一阶段是研究覆盖无人机的理论能力。 使用无线电传播模型“ Free Space”和模型“ Wireless Initiative New Radio” –WINNER D1进行计算。
使用这些模型,计算出几种版本的Wi-Fi的上行链路和下行链路的估计最大传播范围。 此外,我们还测量了Galileo板作为Wi-Fi网络的中间节点的性能。
该实验基于无线接入点的两种操作模式。 第一个-“基础架构”-在大多数商业Wi-FI网络中实现。 在此模式下,访问点是连接网络上设备并用作Internet网关的中央通信节点。 在这种模式下,接入点负责所有网络管理任务。
第二种模式是Ad-Hoc。 它同样是一种常见的网状网络,其中没有一个接入点位于中央。 所有节点都是平等的,每个节点都承担主机或路由器的任务。 Ad-Hoc节点可以移动以形成所谓的移动网络(Mobile Ad-hoc NETwork-MANET)。 此模式的优点是,在移动设备时可以动态更改节点之间的连接。 但是,这种网络的有效运行在很大程度上取决于负责在网络节点之间传递数据包的路由算法。 由于网络拓扑的动态性质,必须定期重新计算节点之间路径的“成本”以找到最佳路径。
为了进行测试,将两个其他设备连接到网络。 网络节点是两台笔记本电脑,分别装有Linux Ubuntu OS和Wi-Fi卡IEEE 802.11 a / b / g / n。 接收侧安装了带Intel Centrino Advance-N 6230无线卡的笔记本电脑,另一侧安装了具有Intel Dual Band 3160卡的笔记本电脑。Intel Galileo板可在AP模式(基础结构模式)下工作,或发送器和接收器之间的中间节点(Ad-Hoc)。 在最后一个设备中,使用了BATMAN路由协议,这已经证明了自己很好。 网络指标是使用iPerf3获得的。 在该实验中,使用具有以下参数的网络节点之间的恒定速度的传输:传输持续时间-30秒; 传输速率:1、3、5、7、9、11 Mbps; 数据包大小:512和1024字节。
实际空中网络的参数是根据以下方案测量的:
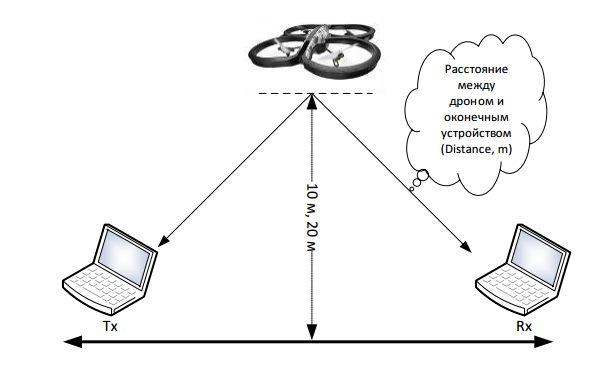
两个终端沿X轴逐渐远离彼此,此时,使用iPerf3网络分析仪测量网络带宽,并使用Rohde&Schwarz FSH3频谱分析仪测量最大信号电平。 四轴飞行器悬挂在10米和20米的高度,并在上面进行了测量。 因此,无人机看起来:

动作半径
如我们在实验中所述,根据“自由空间”无线电波传播模型和WINNER D1模型,测量了通信范围并计算了覆盖范围。 当有必要在发射机和接收机之间没有障碍物的情况下计算无线电信号的长度时,可以使用弗里斯公式。
仅当计算远区中的场时才使用此模型,该计算是根据以下公式执行的:

WINNER D1是随机模型。 它考虑了无线信道中的损耗。 它由以下公式确定:

其中,不定字母变量具有以下值A = 21.5,B = 44.2和C = 20。
在计算中,假设上行链路和下行链路的发射器功率为20 dBm(100 mW)。 针对不同版本的IEEE 802.11标准进行了通信范围的计算。 下表显示了下行链路(下行链路)和上行链路(上行链路)的计算结果。 在计算中,假设无人机在10 m的高度。
在实际实验中,估计接收信号的电平。 下图显示了当飞机在10米的高度上运行时,信号电平取决于基础设施运行模式(左)和自组织模式(右)的距离。

相同的实验数据,但在20米高的无人机操作中:
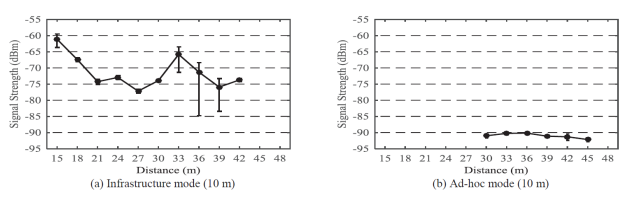
结果表明,理论值与实际值之间存在明显差异。 它们是由许多其他因素引起的。 但是,通常,接收到的信号的电平比自组织中接收到的信号高得多。 图b和d示出较少的测量控制点,因为仅记录了当UAV作为两个终端设备之间的中间点操作时获得的那些测量。 没有考虑通过直接连接笔记本电脑的发射器和接收器获得的结果。 换句话说,当端点之间的距离小于60米(对于10米的无人机高度)或80米(对于20米的高度)时,四轴飞行器在Ad-hoc模式下不充当中间设备。
资料速率
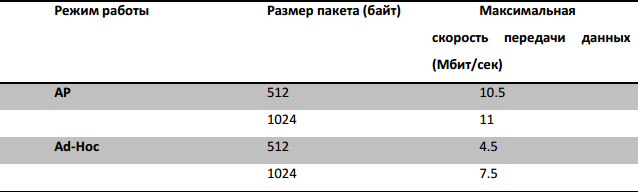
为了以最大吞吐量评估基础架构操作模式和Ad-hoc模式的性能,使用iPerf在端点之间运行数据包。 首次测量是在实验室条件下进行的。 在几种操作模式以及512和1024字节数据包中测得的速度。
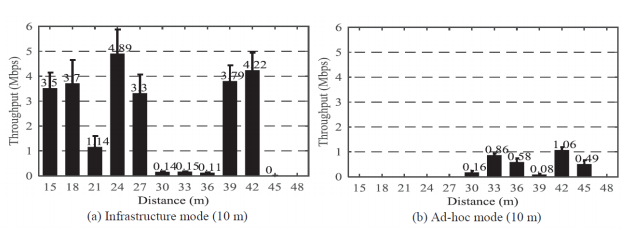
以下测量是在真实条件下进行的。 基础架构速度高于Ad-hoc网络速度。
对于在10米高处操作无人机的基础设施操作模式(左侧)和临时模式(右侧):
相同的实验数据,但在20米高的无人机操作中:
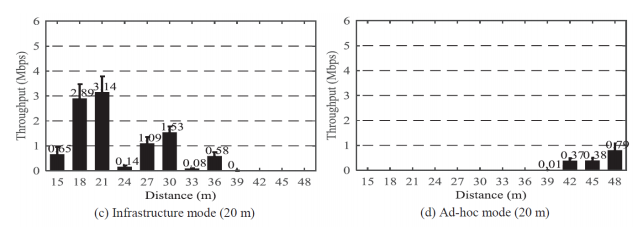
Wi-F的最大数据传输速率取决于802.11标准的版本。 它主要由调制方法,信道宽度,空间流数量,编码和扩频方法确定。
下面给出了该实验可达到的最大速度:
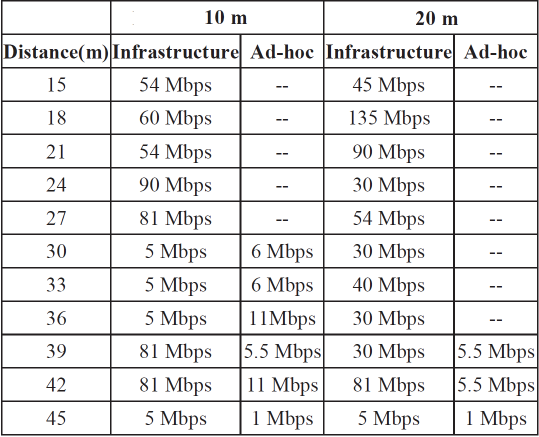
距离增加会影响通信质量。 反过来,这迫使网卡诉诸更保守的调制方法并降低数据传输速率。 在基础架构模式下,可以承受更高的传输速度。
上面,在实验过程中,清楚地表明了使用四轴飞行器扫描无线自动配置的网状网络会带来哪些机遇。 随着通信技术和无人飞行器的发展,以这种方式建立网络的方式将有更多的机会。