50年前,只有军方才负担得起第一批潜艇无人机,并首次“点亮”无人机以不惜一切代价纠正国际丑闻。
然后,该技术迁移到了石油和天然气大亨的服务领域,用于海洋生产平台的建设和维护。
下一个里程碑是对泰坦尼克号的搜寻(但实际上,这是伪装的水下侦察)。 但是,尽管如此,这些探险还是为民用和科学目的带来了可观的收益。
为了吸引年轻人进入这个行业,1998年,美国人开始举办国际学生比赛,2013年,在新加坡举行的亚洲公开赛开始了。
进入这个行业的价格正在逐渐下降:起初只有军事预算,然后是石油公司,其次是大学,最后,出现了价值超过500美元的“车库初创公司”开源项目。 现在,甚至有一个DIY水下无人机设计者。
 目录内容1.在西班牙海底寻找热核炸弹2.海洋石油平台3.“泰坦尼克号”和水下智能4.国际比赛:美国和新加坡5.面向学生的开源项目,众包和设计师6.俄罗斯学生团队的成就
目录内容1.在西班牙海底寻找热核炸弹2.海洋石油平台3.“泰坦尼克号”和水下智能4.国际比赛:美国和新加坡5.面向学生的开源项目,众包和设计师6.俄罗斯学生团队的成就寻找热核炸弹
B28RI热核炸弹,从869米的深度升起。飞机坠毁在Palomares上 。《时代》杂志将该事件列入最严重的核灾难清单。
1966年1月17日,一架装有热核武器的美国战略轰炸机B-52G在空中加油时与一架KC-135加油机相撞。 灾难造成7人死亡,四枚热核炸弹丢失。 他们中的三个降落在陆地上,并立即被发现,第四个落入海中-仅经过两个月的搜索。
搜索团队包括潜水专家队长Willard Searle和数学家John Craven博士,他们使用
有效定位丢失物体的
贝叶斯理论制定了搜索计划。
 帕洛马雷斯的两枚B28热核炸弹的炮弹。
帕洛马雷斯的两枚B28热核炸弹的炮弹。为了进行搜索,美国海军中队由34艘船组成,运载3000多名水手和民用承包商。 为了研究深达24米的浅层底部,使用了潜水员。 身穿潜水服的潜水员工作深度达120米。 Alvin和Aluminaut载人水下航行器进行了深度搜索。
 艾尔文(Alvin)-最著名的有人驾驶水下航行器(PAP)之一。 bathyscaphe专为三人(两名科学家和一名飞行员)而设计,可让您在10小时内潜水至4500米的深度。1964年,世界上第一艘铝潜艇Aluminaut 。 顺便说一句,雅克·库斯托(Jacques Cousteau)然后开车。
艾尔文(Alvin)-最著名的有人驾驶水下航行器(PAP)之一。 bathyscaphe专为三人(两名科学家和一名飞行员)而设计,可让您在10小时内潜水至4500米的深度。1964年,世界上第一艘铝潜艇Aluminaut 。 顺便说一句,雅克·库斯托(Jacques Cousteau)然后开车。炸弹是阿尔文在近800米的深度发现的。 炸弹位于断层的70度倾斜处,其深度达到1300米。 3月26日进行的首次尝试将电缆与降落伞吊索绑在一起,但未成功。 炸弹掉了下来,又丢了。 它于4月2日被发现。 在4月5日,发生了严重的紧急情况,当阿尔文陷入降落伞中时,该装置的飞行员失明了,无法在15分钟内释放。
遥控设备索控海底救援车(CURV)。在此事件之后,CURV遥控无人设备被用于进一步的工作。 在4月7日,借助该设备,可以将两根电缆连接到降落伞,但是当尝试启动第三根电缆时,CURV也感到困惑和失去控制。 释放他的尝试以失败告终,因此决定用两条电缆将装置炸弹升起。 这次尝试是成功的,事故发生后81天,炸弹被举升到了Petrel救援船的甲板上。
据《纽约时报》报道,这是有史以来第一次公开展示核武器。军事在遥控和自主设备领域继续发展。 同时,石油行业将目光投向了技术。
服务于石油和天然气行业及生产平台

“遥控无人水下航行器”(TNPA,ROV)在1980年代开始流行,当时大多数新的海上油气开发超出了潜水员的能力。 但是在80年代中期,海洋TNLA行业遭受了技术发展的严重停滞,特别是由于油价下跌和全球经济下滑所致。
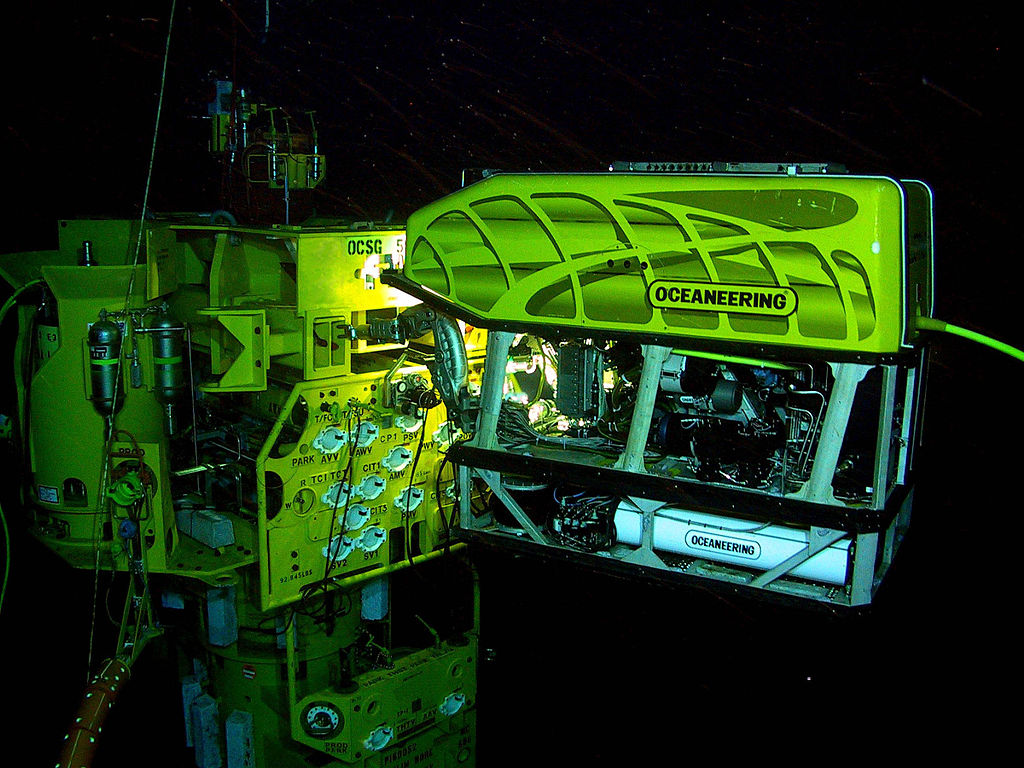 ROV在海底油气田中发挥作用。 TNPA转动水下结构上的螺母。
ROV在海底油气田中发挥作用。 TNPA转动水下结构上的螺母。这样的TNLA广泛用于海上生产。 新技术使机器人可以更深入地潜水。
顺便说一下,这是一条鲨鱼咬水下电缆的传奇视频:
铁达尼号

铁达尼号于1912年4月15日沉没。 尝试找到他的时间是1953年,1966年,1970年和1980年。 (
在这里阅读更多。)
根据发票,在泰坦尼克号上运输了一批价值约3亿美元的珠宝。 此外,船上还有奥马尔·海亚姆(Omar Khayyam)的红宝石原件以及古埃及公主的木乃伊。
罗伯特·巴拉德(Robert Ballard)于1985年发现了《泰坦尼克号》。 虽然这次“远征”只是一个掩护。 这项行动是由美国海军资助的,用于情报情报是在1960年代沉没的两艘USS蝎子和Thresher核潜艇,而不是泰坦尼克号。 潜水艇分别于1963年和1968年沉没,海军部队想确定是否存在辐射泄漏。
ANGUS是一堆摄像机,是一艘船在水下用电缆拖曳的摄像机:
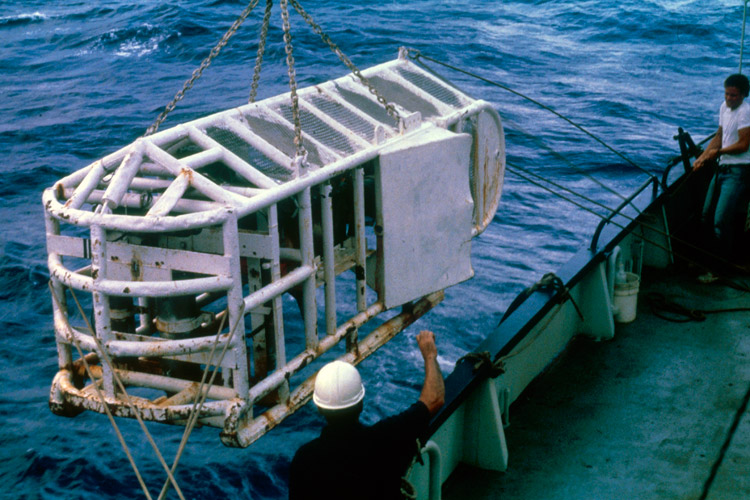 ANGUS(航海地质水下调查)。 该设备具有缺点:它效率不够。 仅在将设备提升到地面后才能开发和研究素材。
ANGUS(航海地质水下调查)。 该设备具有缺点:它效率不够。 仅在将设备提升到地面后才能开发和研究素材。这个装置的创造者仍然很有趣。 由于缺乏最简单的控制方法,工程师们亲切地称该设备为“傻瓜”。 ANGUS团队的口号是“尽管泄漏,但它还在滴答作响”。
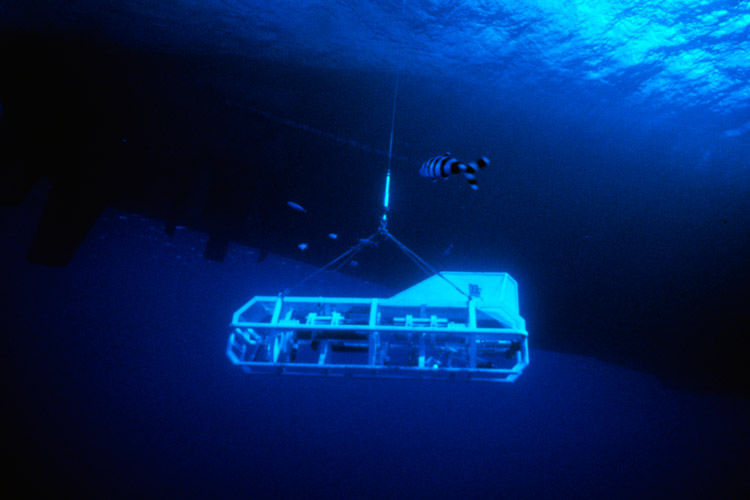 像ANGUS一样,Argo是一个金属结构,配备了五个摄像机和两个声纳系统。
像ANGUS一样,Argo是一个金属结构,配备了五个摄像机和两个声纳系统。1985年9月1日,连接到Argo摄像机的监视器显示了非自然来源的物体。 第二天,发现了泰坦尼克号的船体,ANGUS被送往海底进行摄影。
在接下来的四天中,Argo和ANGUS拍摄了数千张照片。 泰坦尼克号的残骸散布在半径1600米的区域内,深度约3800米。
1986年7月12日,巴拉德第二次远征泰坦尼克号。 现在,他可以使用一个三人的水底潜艇“ Alvin”和一个遥控机器人JasonJr。
.jpg) “阿尔文”-最著名的有人驾驶水下航行器(PAP)之一。 bathyscaphe专为三人(两名科学家和一名飞行员)而设计,可让您在10小时内潜水至4500米的深度。装置“ Jason Junior”(Jason Jr)使用Jason Junior装置研究《泰坦尼克号》。
“阿尔文”-最著名的有人驾驶水下航行器(PAP)之一。 bathyscaphe专为三人(两名科学家和一名飞行员)而设计,可让您在10小时内潜水至4500米的深度。装置“ Jason Junior”(Jason Jr)使用Jason Junior装置研究《泰坦尼克号》。1987年,国家地理频道拍摄了一部纪录片,以寻找《泰坦尼克号》,詹姆斯·卡梅隆(James Cameron)观看了该纪录片,并受到启发创作了他自己的杰作。
1995年9月,卡梅伦乘坐俄罗斯研究船Akademik Mstislav Keldysh亲自登上Mir-1和Mir-2水域到泰坦尼克号潜水12次,后来也参与了影片拍摄。
泰坦尼克号的电影比船本身更有价值。 这艘船的建造成本为400万英镑,按现代货币计为1亿英镑,而詹姆斯·卡梅隆电影的成本为1.25亿英镑。
国际比赛
比赛是一种吸引年轻人的出色游戏机制,可让您“关注职业”感兴趣的领域的许多专家。 国际竞赛的出现是水下无人机发展以及产业和市场形成的重要里程碑。
机器人自1998年以来,国际比赛一直在美国太空和海军系统中心举行。
网站
-www.robonation.org/competition/robosub2017年规则 (PDF)。
 自主
自主水下航行器(AUV)参加RoboSub竞赛,并在苛刻的水下环境中完成现实的任务。

AUVSI基金会由国际无人机系统开发者协会成立,是一个非营利性组织,为学生提供机会参加机器人领域的实践活动,旨在激发并保持他们对科学,技术,工程和数学(STEM)的兴趣。

每年,AUVSI基金会都会提供许多教育计划以及机器人竞赛,使学生能够在课堂外进行技术教育。 此类活动是专业活动的理想准备,因此,参加这些活动的学生通常在毕业前会得到令人垂涎的实习和就业机会。
新加坡AUV挑战赛(SAUVC)自从2013年以来,新加坡AUV挑战赛(SAUVC)亚洲水下机器人锦标赛在新加坡举行。
网站
-www.sauvc.orgFacebook页面 。
规则2018 。
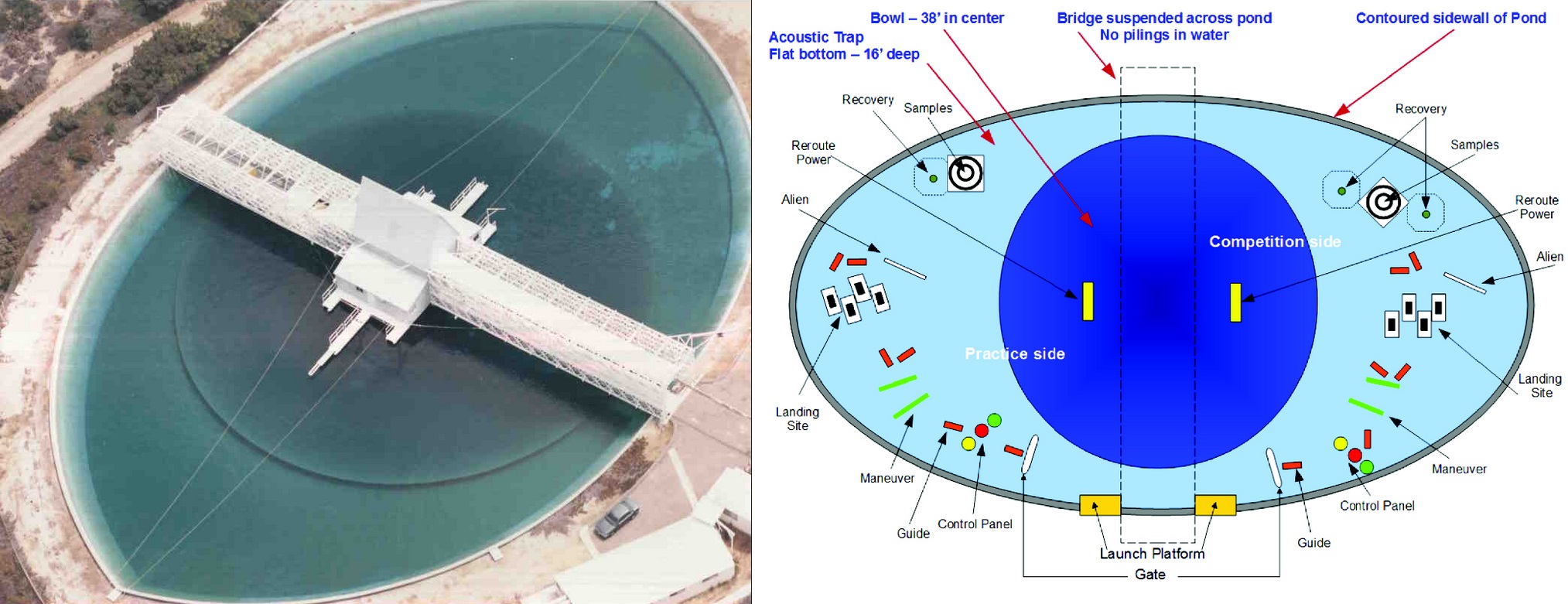
以下是2013年竞争对手用他自己的话描述任务的方式:
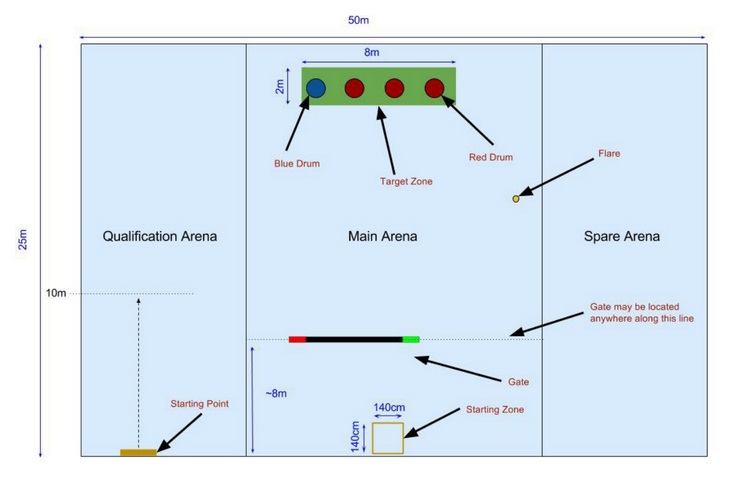
“任务可以大致描述如下:您需要越过池底的黑色条纹,并在某个时候出现。 即,这样的排线机器人。 但是,规则有些不清楚,无法描述整个过程。 您必须穿过一些大门。 但是,如果能越过隔离带很好,那么通过它们您将自动通过。 还有一个站立的球,球必须被踢起。 同样,如果您走在带材上方并处于正确的高度,那么下次您转球时,您将自动踢出。 当黑条结束时,您需要显示在正确的位置。 总的来说,整个比赛围绕着底部的黑条展开:-)。”
有关2013年水下机器人技术的详细故事在
这里 。

Openrov
Garage Startup是惠普和苹果以及许多其他硅谷项目的开始。 当技术可供“黑客”使用时,他们开始自己进行试验并找到惊人的解决方案。
2012年,在Kickstarter上启动了OpenROV项目,这是一款重约2.5千克的远程微型水下机器人。 它由配备有带背光摄像机的笔记本电脑控制。 浸入深度:长达100米,电池寿命:〜1.5小时。 它由三台无刷电机(800Kv无刷电机)驱动:两台在水平方向,一台在垂直方向。 为了获得视觉图像,使用了传统的网络摄像机(Microsoft LifeCam HD-5000),该网络摄像机通过USB连接到BeagleBone。
该套件采用需要组装的备件形式。 该项目的开发人员基于开源软件和开源硬件的原则,为自己设定了使水下研究便宜且所有人均可使用的目标。 图纸可在
GitHub上获得 。
TED的表现:
 Beagle板用作车载计算机。Trident 2016(OpenROV的下一个版本)
Beagle板用作车载计算机。Trident 2016(OpenROV的下一个版本)美国的StartROV OpenROV筹集了资金来创建Trident水下遥控车(ROV)。 该公司计划筹集5万美元,但已经吸引了超过56万美元。
OpenROV 2.8和三叉戟无人机控制范围最大为100米。 重量-2.9公斤。 最高速度为2 m / s。 电池寿命-3小时。 支持自动悬停并保持移动方向。 可以将其连接到虚拟现实眼镜以进行第一人称控制。
Gladius 20172017年,另一个水下机器人的
众筹项目出现在IndiGoGo网站上。

4k摄像机,深度100米,作用半径500,价格600-1700美元。
小学生设计师MUR-JuniorSkills竞赛包。
这项开发是由符拉迪沃斯托克(Vladivostok)的谢尔盖·穆恩(Sergey Moon)在11月12日于哈巴罗夫斯克举行的RoboMech-2015展览上提出的。
项目站点
-murproject.com在该构造函数的基础上,以
“水机器人系统”为主题,为来自俄罗斯各地的高中生举办了NTI奥林匹克竞赛。
在排位赛阶段,有必要解决物理和计算机科学中的问题,并掌握3D模拟器上水下机器人的控制。
在最后阶段,任务更加有趣:
- 由设计师(建议MUR设计师)组装两个水下机器人;
- 两个机器人都必须在水下物体的引导下保持一定距离。 但是只有一个配备了摄像头的机器人,第二个应该从第一个机器人接收信号;
- 使用建议的组件并可以访问设计者的协议和电路,从而在机器人之间开发自己的通信设备;
- 机器人之间的通信组织。
早在2017年,奥林匹克“水智能机器人系统”就在Innopolis举行。 (规则在
这里 。)
俄罗斯海参div
我非常高兴地知道,我所在城市和我的
大学(远东联邦大学,FEFU)的水下无人机开发团队
是如此
出色 。
 自2012年以来,远东联邦大学和俄罗斯科学院远东分公司的机器人技术联合团队每年都在RoboSub世界锦标赛和新加坡AUV挑战亚洲锦标赛中获得自动机器人组的冠军。
自2012年以来,远东联邦大学和俄罗斯科学院远东分公司的机器人技术联合团队每年都在RoboSub世界锦标赛和新加坡AUV挑战亚洲锦标赛中获得自动机器人组的冠军。这里是Junior,这是符拉迪沃斯托克(Hladivostok)团队用来
捕捉水池深处并赢得奖品的机器人。
 机器人
机器人2012年-第五名(FEFU,海参div)
2013年-第三名(FEFU,海参div)
2014年-第四名(FEFU,海参div)
2015年-第三名和第六名(海事大学以内维尔斯基和FEFU,符拉迪沃斯托克命名)
2016年-第四名(海事大学以符拉迪沃斯托克(海参div)的内维尔斯基命名)
2017年-第二名(FEFU,海参div)
新加坡AUV挑战2013年-第一名(FEFU,海参div)
2015年-第二名(FEFU,海参div)
2016年-第二名(FEFU,海参div)
2017年-第一名(FEFU,海参div)
在下一期中,我将介绍符拉迪沃斯托克(Hladivostok)团队(与开发人员的访谈,机器人的性能特征等)以及国际比赛的规则。资料来源