嗨,极客时间!
参赛作品
长期以来,我们都知道机器人是我们的未来。 机器人技术有很多领域。 军事发展,社交,娱乐和仅工作的机器人。
但是这一次,我想代表MIREA学院的团队介绍竞争组件,以及有关相扑选手的机器人。
关于我们团队的一点
我们自2014年成立以来。 大多数比赛的获胜者是Robofinist,Robofest,MIPT Spartakiad和较小的比赛,在迷你相扑提名中,我们还是2016-2017年俄罗斯的绝对冠军。
这些相扑机器人是谁?
最初,当我们第一次了解此类比赛时,相扑选手主要来自乐高玩具。 但这是一个很糟糕的主意,以后再讲。
此刻,正确的相扑师的描述非常简单:轮子上的一块完全自主的铁块,带有大脑和一对传感器,将类似的一块铁块从环中敲出。
它们有4种类型:
1.超级至上主义者
2.迷你Sumoist
3.微观至上主义者
4.纳米至上主义
所有这些不仅在外部而且在内部都不同。
兆丰是最大,最危险的机器人。 最大重量可达3公斤,可以放置各种“吸盘”,这是其他机器人所不允许的。
迷你-漂亮的小型机器人,重达500克10 x 10厘米,不难焊接,易于安装和组装。 它们是相扑中最受欢迎的提名。
微型和纳米-迷你缩略图。 微型5乘5乘5,纳米2.5乘2.5乘2.5。 很难焊接和拾取细节。 比大型相扑更受欢迎。
在
此页面上,您可以详细阅读比赛规则。 (添加)
机器人相扑的本质是什么?
主要目标:将敌人推到圆形多边形的范围之外。 首先触摸它外面的任何物体的人都会丢失。 看来困难的事情就是简单地将敌人赶出去吗? 而且困难在于机器人是完全自主的,并且越来越多的新策略正在出现,这些新策略越来越难以应对。
包含我们的机器人的视频(已添加):
Robofest 2016 (带闪电的机器人,带海盗旗的机器人,纯黑色低位机器人,黑色高位机器人(无图片))
Robo picnic 2017 (仅限我们的机器人,带有声音传感器的矩形机器人除外)
没有参与:
Robotex 20162017年拉脱维亚机器人锦标赛RoboChallenge 2016机器人大赛敌人搜寻策略的小概述。它们是由什么制成的?
让我们回到乐高。 最有可能的是,你们中的许多人都试图用可编程的Lego构造函数来做某事,或者至少已经看到了如何做。 对于此类机器人15甚至15甚至还有一个单独的提名,但非常无聊,并且仅适用于初学者或小型机器人。 与自制样品相比,除了组装的复杂性之外,这一切都失去了。
首先是低速。 其次,规模巨大。 第三,传感器响应速度低。 而且控制器本身还有很多不足之处。
组装细节
组成比赛的相扑选手正在练习arduino。 他们使用纺织板,焊接传感器,控制器,驱动器等。还有多种传感器可以检测敌人,但应使用红外或激光传感器,因为 声纳非常缓慢且笨重。 当然,需要引擎和轮子,以便机器人可以移动。 您可以给它们设置无限的数量,但实践表明,机器人最好骑在位于后部的两个轮子上。 而且,当然,没有铲斗和钩子,机器人就无法生存。 铲斗只是一个箱子,是包装纸,是板子和零件的保护层。 最常见的是钢或铁。 拖车由文具刀的刀片制成,但是有些标本采用非标准方法,例如,磨锐的木尺或棉绒,但是这种方法几乎没有用。
设计机器人最困难(除了编程) 。但是,特别是对于那些想参加但还不知道从哪里开始的人,我们准备分享机器人的踪迹,该机器人是MIPT 2016 Spartakiad的获奖者。
PS在
SprintLayout中完成
这被称为第一阶段-放置引擎和传感器。 在这里您还可以观察到拾音器前面的两个小传感器,因此它们是线路传感器。
它们用于检测垃圾填埋场上的白色条纹,以防止意外掉入环外,但它们不是必不可少的组件,实际上并不经常使用。 高速通常不允许您准时停车。
此处已经应用了控制器,驱动器,开关和电池连接器。
仅保留打印迹线并将其传输到PCB,然后跟踪迹线。
这是成品板上的外观:
准备启动机器人:
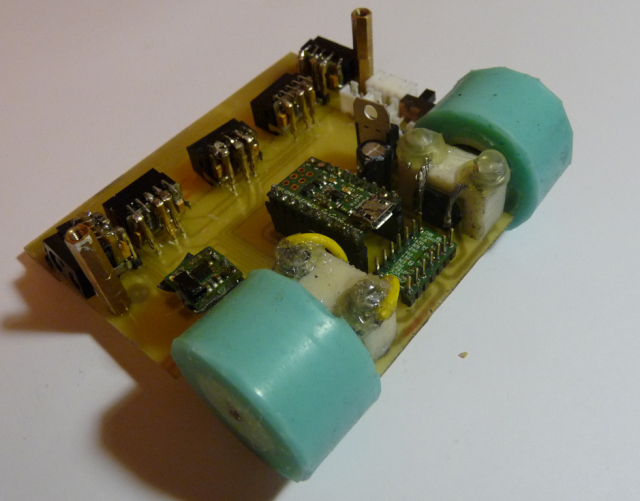
如您所见,这里没有什么特别复杂的。 关于以下问题。
让我们继续编程
最简单的方法是使用arduino或arduino兼容的控制器。 另外,Arduino IDE可以帮助我们。 根据标准方案,机器人具有5个传感器。 所以状态可能是
我们排除了侧面传感器同时看到敌人的情况(因为这种情况不会发生,并且如果发生则说明其中一个传感器存在故障),以及侧面传感器和两个正面传感器给出0的情况(即看到),因为 这也不可能,或者机会太小。
为了使他走向敌人,我们只需要安装销钉,向电动机施加电压并读取传感器读数:
机器人代码// int pin_left=10; int pin_center_left=11; int pin_center_right=4; int pin_center=12; int pin_right=7; // int pin_motor_left_forward=9; int pin_motor_left_back=6; int pin_motor_right_forward=3; int pin_motor_right_back=5; // int cl,cc,cr,l,r; // void GLAZ() { cl = digitalRead(pin_center_left); cc = digitalRead(pin_center); cr = digitalRead(pin_center_right); l = digitalRead(pin_left); r = digitalRead(pin_right); } // , 0 255 void MOVE( int a, int b ) { if(a<0) { digitalWrite(pin_motor_left_forward,LOW); analogWrite(pin_motor_left_back,0-a); } else { analogWrite(pin_motor_left_forward,a); digitalWrite(pin_motor_left_back,LOW); } if(b<0) { digitalWrite(pin_motor_right_forward,LOW); analogWrite(pin_motor_right_back,0-b); } else { digitalWrite(pin_motor_right_back,LOW); analogWrite(pin_motor_right_forward,b); } } void setup() { pinMode (pin_center,INPUT);// pinMode (pin_right, INPUT);// pinMode (pin_left,INPUT);// pinMode (pin_center_right, INPUT);// pinMode (pin_center_left,INPUT);// pinMode (pin_line_left, INPUT); pinMode (pin_line_right, INPUT); pinMode (pin_start,INPUT);// pinMode (13,OUTPUT);// digitalWrite(13,HIGH); pinMode (pin_motor_left_back, OUTPUT);// pinMode (pin_motor_right_forward, OUTPUT);// pinMode (pin_motor_right_back, OUTPUT);// pinMode (pin_motor_left_forward,OUTPUT);// // while(!digitalRead(pin_start))continue; MOVE(200,200); } void loop() { GLAZ(); if(l && r) { if( (cl + cc + cr) < 2 || !cc ){ MOVE(255,255); } if( cc ) { if(!cl && cr) MOVE(0-180,180); if(cl && !cr) MOVE(180,0-180); } } else if( cc + cr + cl == 3 ) { if(!l && r) MOVE(0-200,200); if(!r && l) MOVE(200,0-200); } else if(cc) { if(!l && !cl && cr && r) MOVE(0-150,150); if(l && cl && !cr && !r) MOVE(150,0-150); } if(!digitalRead(pin_start))while(1){MOVE(0,0);} }
您只需要改进代码。
重要!如果传感器什么也看不见,则返回1,如果有障碍,则返回0。
通过USB下载代码后,机器人就可以竞争了。
值得考虑
首先,这些是要素。 我们使用的传感器(锐化340)很少或根本没有。 因此,如果可能的话,您需要立即采取很多措施或找到适合该参数的模拟量。
其次,不可能对敌方机器人造成任何重大损害或使用磁铁进行捡拾。 这在某种程度上限制了我们选择斗争的手段。
也不要忘记车轮。 弯曲,细小和滑动的曲线将不起作用,您将无法操纵并且力矩不足。 确保测试橡胶。
使用发动机时,请记住,它们将必须在最大负载下工作,并且会经常燃烧。
制作可拆卸电池也很有意义,因为 机器人放电非常快,并且需要很长时间才能充电。
必要购买清单:
1.烙铁,焊锡,助焊剂(可选)
2.纺织板(要蚀刻,您需要关闭所有迹线,然后将其全部放入过氧化氢+柠檬酸+盐的溶液中几个小时,然后撕下纸张,例如隐藏迹线的纸)
3.夏普340传感器
4.发动机,选择口味,转速越高,效果越好。
其中一些
值得选择 :
polulu。 (添加)
5.电池(建议您带锂聚合物电池)+充电站
6.按键(开关按钮,焊接到板上)和电气元件(请参见带有图示的图片)
7.司机
8.控制器,对于初学者,您可以尝试Polulu A-Star 32u4 micro并填写Arduino引导程序
9.外壳钣金
10.钻板上的孔
11.启动器及其启动模块
PS:如果您错过了某些内容,请写,我会纠正的。
比赛项目
即将举行的比赛将在Robofinist圣彼得堡举行,所以现在我们正在为他们做准备,如果您想参加,则需要清晰,快速地做所有事情。
但是这些比赛不是唯一的比赛,在俄罗斯有很多比赛,最大的比赛在莫斯科举行。 一两个月左右一次,您可以体验快乐并竞争。
此类比赛在国外并不罕见,我们也希望到达那里。 这是世界比赛的大概地图:

我们真的希望在我们的国家只会发展robo-sumo,并且我们邀请每个人都参与创建自己的机器人。
当来自某个机器人的碎片飞走时,它看起来非常史诗。我们正在为我们完成这篇介绍性文章,并祝大家在机器人技术方面取得成功,我们很高兴在比赛中见到您!