今天,LIGO和处女座的合作宣布(将在PRL上发表,文章可在
此处阅读)有关引力波的新检测(GW170814)。 前三个事件(
一个 ,
两个 ,
三个 )记录在美国的两个LIGO探测器上。 8月1日,位于意大利的欧洲
先进VIRGO探测器加入了观测。 在8月14日,所有三个探测器都检测到了两个黑洞汇合处的引力波。
 评估所有注册的引力波源的位置。 由于使用了三个检测器的数据,GW170814的定义精度更高。
评估所有注册的引力波源的位置。 由于使用了三个检测器的数据,GW170814的定义精度更高。关于信号
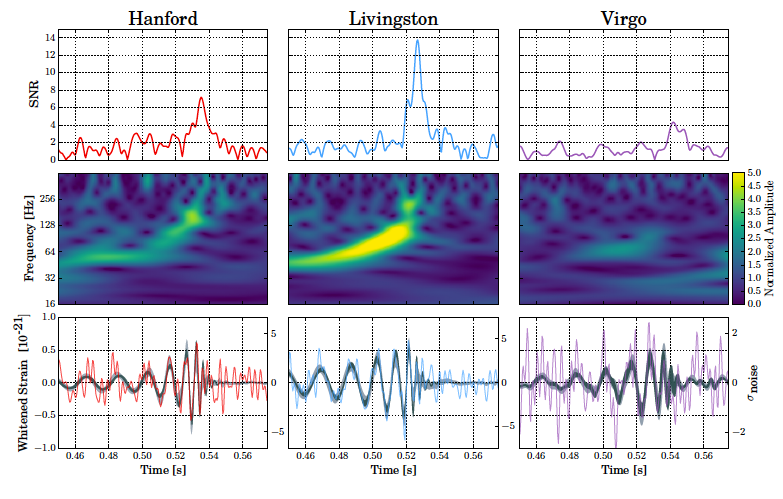 第一行:三个LIGO Hanford,LIGO Livingston和处女座探测器的信噪比; 中排:信号频谱随时间变化; 最下面的一行:时间信号(彩色),滤波后的信号(灰色)和叠加的GR模型(黑色)
第一行:三个LIGO Hanford,LIGO Livingston和处女座探测器的信噪比; 中排:信号频谱随时间变化; 最下面的一行:时间信号(彩色),滤波后的信号(灰色)和叠加的GR模型(黑色)与前三次一样,信号的来源是太阳质量25和30合并的黑洞,相距约15亿光年。 合并的结果是,黑洞形成了一个质量约为日光的53个黑洞,并且约2.7个太阳质量被转换为重力波。 信噪比18给出了在2.7万年中出现错误信号1的可能性。 信号本身与GR具有良好的相关性,这里没有任何意外。 最有趣的是三个检测器上的检测事实,以及我们可以从中获得的其他知识。
高级处女座

欧洲探测器位于意大利比萨附近。 处女座的合作汇集了来自意大利,法国,荷兰,波兰和匈牙利的科学家。 探测器本身与高级LIGO相似,但由于以下几个因素而导致灵敏度较低:它更短-干涉仪的臂长为3 km,而不是LIGO中的4。 镜子的悬架由金属制成(品质因数较小,热噪声较大); 激光的功率较小; 实施早期阶段的噪声控制和滤波系统。
结果,高频下的灵敏度比LIGO低了几倍,而且探测器本身也很吵。 在频谱上清晰可见50 Hz电源的未过滤噪声以及来自不同控制信号的峰值。
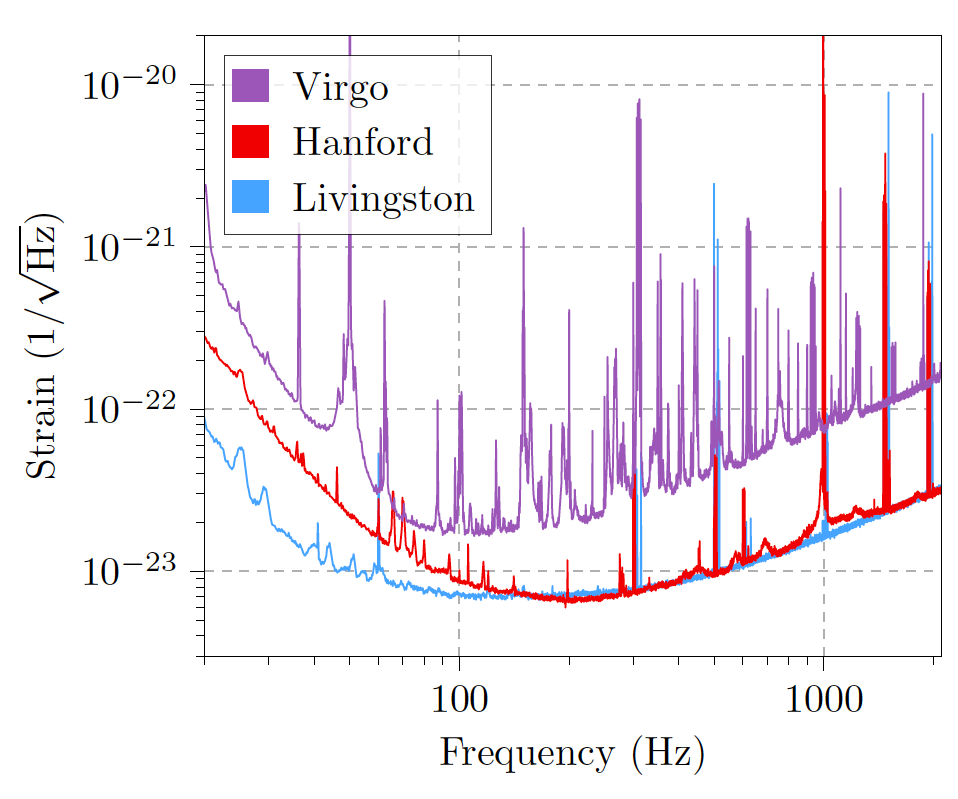 检测器的频谱噪声密度(已过滤已知噪声)。 噪声越低,检测器的灵敏度越高。
检测器的频谱噪声密度(已过滤已知噪声)。 噪声越低,检测器的灵敏度越高。第三个检测器如何帮助检测?
处女座的低灵敏度使得很难识别噪声中的信号(如文章第二张图片所示),如果没有LIGO,该信号将不会被认为足够可靠。 但是,结合使用两个LIGO探测器,它可以使源位置的三角测量更加精确。
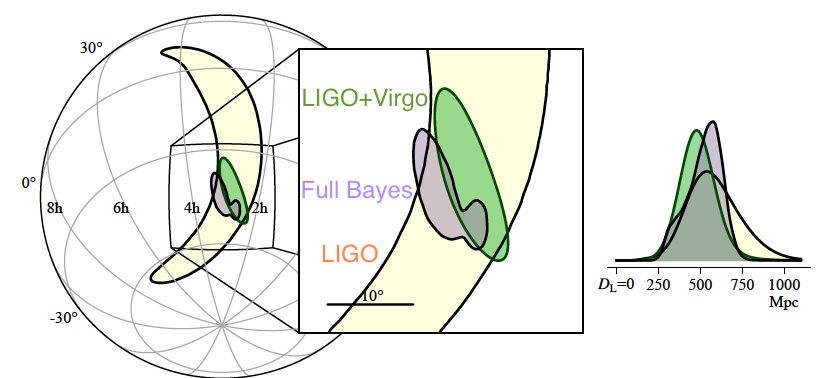 考虑到基于LIGO和Virgo的模型的所有参数,信号源位于天空中的区域:黄色-仅LIGO,绿色-LIGO和处女座,紫色-贝叶斯位置估计。 右:估计的源范围。
考虑到基于LIGO和Virgo的模型的所有参数,信号源位于天空中的区域:黄色-仅LIGO,绿色-LIGO和处女座,紫色-贝叶斯位置估计。 右:估计的源范围。另外,位于不同平面中的第三检测器允许人们对忙碌粒子的极化进行估计。 在广义相对论中,引力波垂直于其传播方向拉伸和压缩空间,并且存在两种极化(x和+)
 图片由汤姆邓恩
图片由汤姆邓恩当硬件到达严格垂直于干涉仪平面的检测器
并且臂
的方向与极化一致时,信号幅度达到最大值。 例如,如果x偏振波到达相对于其旋转了45度的检测器,则两个臂以相同的方式拉伸,并且输出处的干涉图案不变,即没有信号。 如果有两个检测器位于LIGO和处女座等不同平面上,则信号幅度不仅会因相对于传播方向的斜率而不同,而且还会因检测器相对于极化的方向不同而有所不同。 这使得可以估计HS的极化。 两个LIGO探测器几乎都在同一平面上并且具有接近的方向,但是处女座的位置较大,这大大提高了估计值。
这里有趣的一点如下:重力的度量理论(而GR仅是其中之一)不仅允许张量(如GR),而且还允许矢量和标量极化。 测量极化的能力使我们能够检查是否真的测量张量极化。 为此,在标量或矢量极化的假设下,执行与GR相同的合并计算,并将结果与真实信号进行比较。 结果,GR证明是比纯标量或纯矢量更可能的模型。
接下来是什么?
第二个观测周期完成,科学家处理数据。 这些探测器已经投入使用,下一个科学周期将在一年中的某个地方开始。 在这段时间内,激光器的功率将增加,由于光散射引起的损耗将减少,并且可能
会增加
压缩光 。
敬请期待!
加法
- 合并BH的精美模拟
- 带弹簧的互动天空地图
- 在上一篇文章和有关它的讨论中,我草率地检测了重力。 波浪可以帮助估计它们的传播速度。
详细资料我特别指出,使用两个探测器进行“三角测量”可以很好地评估这种速度。
事实并非如此,如果仅通过两个检测器之间的信号延迟来评估速度,则只能限制该速度。 使用两个检测器的传播方向很难确定,甚至使用所有检测的数据也很难确定,但是考虑到所有不确定性,可以50%的准确度给出估计值。 甚至三个检测器的准确度也很低,只有一个百分点。
在这里您可以阅读更多内容。我给出的估计来自坟墓分散的估计。 假设GR的有效性。 也就是说,通过检测,我们可以非常准确地说出GW没有分散,因此根据GR,它们的速度等于光速。
感谢
Serge3leo的更正。