在之前的出版物中,我概述了1965年至2017年的Fischertechnik工程设计师的历史,现在,按照读者的意愿,我对524328 ROBOTICS TXT Discovery装置发布了概述。

构造器524328适用于对机械,自动化,编程,计算机视觉或现在对机器人技术感兴趣的男孩和女孩。
纸板箱包含机械零件,电机,可编程的TXT控制器,摄像机,ROBO Pro软件,组装说明以及一本带有教育材料的PDF格式的小书。
此外,与设计师合作,我们需要一个34969电池组,其中包括镍氢电池和充电器。
但是,在继续详细介绍该套件之前,建议您熟悉第一位致力于机器人技术的Fischertechnik设计师的历史。
背景知识
1983年,第一位致力于移动机器人技术的基于fischertechnik的设计师出现,当时是当时在英国进行的一项实验教育项目的一部分。
从事该项目工作的Economatics公司提请注意MIT Seymour Peypert (1928-2016)的年轻科学家的工作,他预测了计算机技术领域即将发生的革命的规模,并建议利用他的团队开发的培训从早期就将儿童介绍给计算机。编程语言徽标 。
Logo的重要功能是运行时的用户友好界面以及在此环境中存在的虚拟控制对象-图形“龟”,根据已编译程序的命令,该图形可以在计算机屏幕上移动并留下痕迹。 顺便说一句,Peypert先生的这项工作已经进行了许多次转换,并且以一种名为Scratch的学习编程环境的形式存活至今,直到今天。
因此,在提出的解决方案中,提出了用非常真实的对象(移动购物车)代替虚拟乌龟的提议。 因此,学生不仅有机会了解编程技术,还可以学习机器人技术的基础知识。 因此出现了第一个BBC Buggy装置:
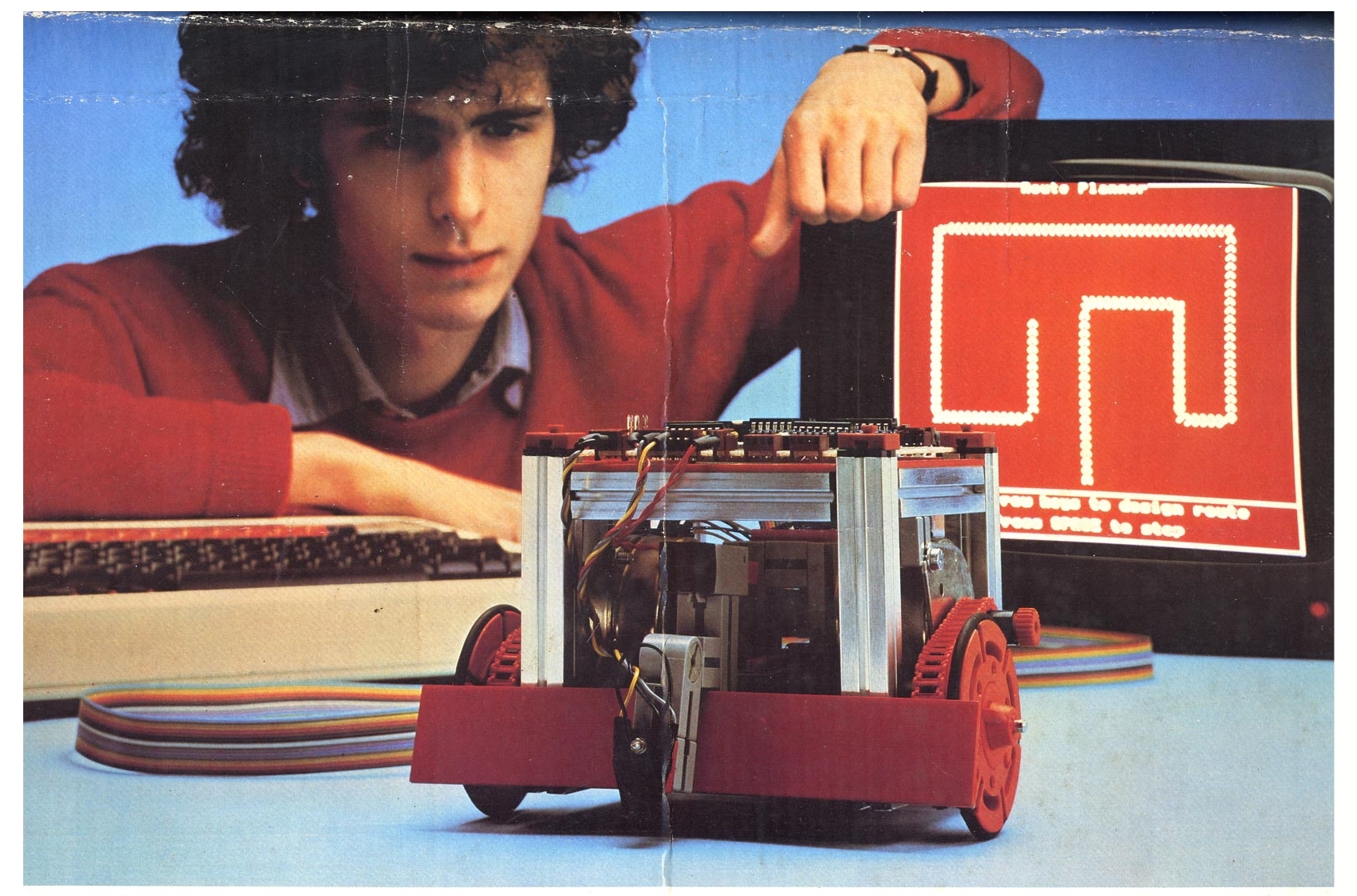
该套件包括用于组装推车的fischertechnik零件,控制板,带有控制程序示例的运输工具以及培训任务的说明。 使用扁平电缆将控制板连接到计算机。 可以说这是fischertechnik + Economatics的联合项目。
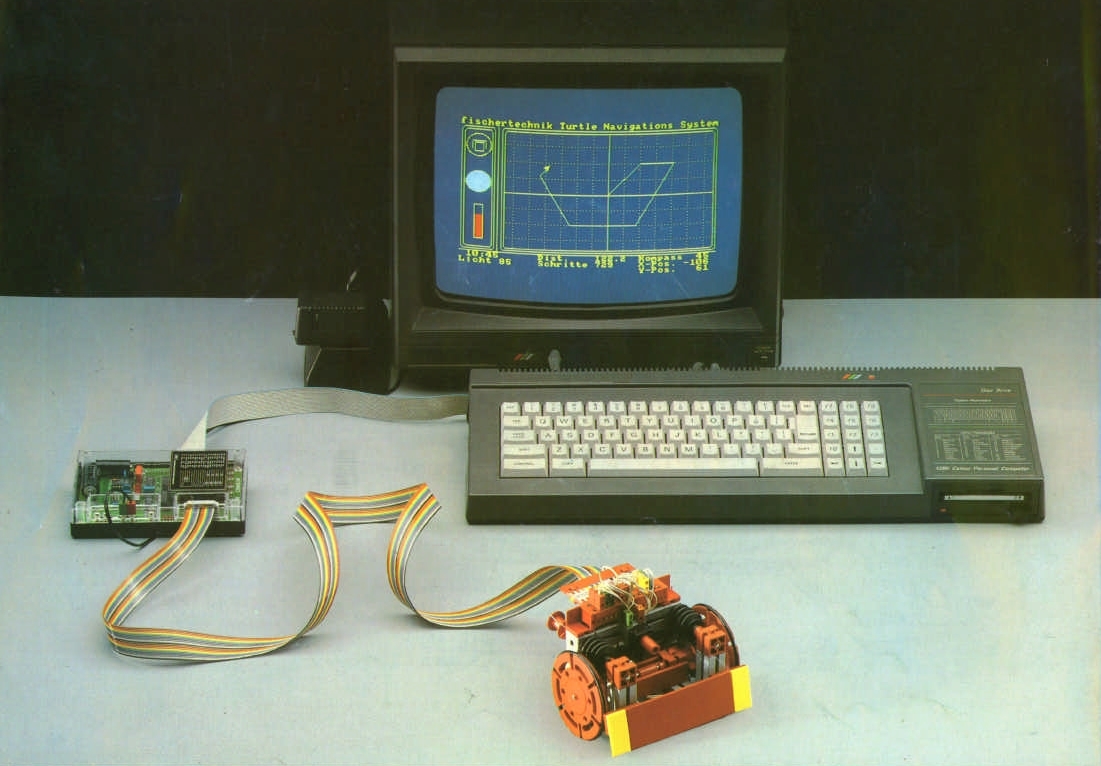
Fischertechnik在1987年推出了第一个完全专有的机器人实验套件-39502 Computing-Experimental。 从集合中可以构建自动机器的几种变体,并尝试编程控制算法
接下来是下一代设计师和功能扩展的其他套件,但这是一个故事,需要单独撰写。 今天,我建议您仔细看一下当前集-524328 ROBOTICS TXT发现集
524328 ROBOTICS TXT发现集
设计器524328由310个部分组成,可以从中构建14个用于实验的模型。 除了组装说明和带有ROBO Pro软件的CD外,该包装盒还包含用于组装用于测试移动机器人的测试场的空白。 传统上,这套工具随附一本PDF格式的迷你书,您可以从中获取机器人技术的基本信息。
包装外观:

在纸板箱内部,零件分别存储在两个单独的隔间中的塑料小室中。 如果需要,您还可以购买专有的存储系统,并使用基材对易于使用剪刀从组装说明中切割的零件进行分类。
为了在杯子和学校中使用,这位设计师被包装在更方便耐用的塑料容器Gratnells中,并有另一个订货号533018。

除了简单的结构元素外,零件清单还包括两台带有内置编码器的伺服电机,一台带外齿轮箱的常规直流电机,一个光电晶体管,一个热敏电阻,总线,LED和一个橙色球,用于使用计算机视觉系统进行实验:

(通过单击图片-hirez)
可编程TXT控制器
设计器524328中的控制单元以紧凑型计算机的形式制成,该计算机基于ARM Cortex A8处理器和ARM Cortex M3上的集成输入输出板构建。 为了与用户互动,该设备具有带背光的2.4英寸,320x240彩色触摸屏。 此外,计算机还具有内置扬声器和RTC,并带有锂电池的后备电源。
TXT控制器:

TXT控制器在Linux内核OS下运行。 如果需要, 您可以从插入式微型SD存储卡引导操作系统 。
记忆
- 128 MB DDR3内存
- 64 MB闪存
- 微型SD
- USB大容量存储设备
通讯技术
控制器接口具有以下接口:
- 蓝牙2.1 EDR + 4.0
- WLAN 802.11 b / g / n
- USB mini连接器,用于连接计算机
- 具有主机控制器功能的USB-A连接器,用于连接USB相机,USB闪存驱动器和其他设备。
- 用于“遥控器套件”套件中的遥控器的红外光电探测器
- I2C接口
- UART接口
- CAN接口
输入输出
- 通用输入:8件数字/模拟0-9V或0-5 kOhm
- 计数输入:4个(0-9V Fin <1 kHz)
- 通用输出(PWM 9V / 0.25A):8件
以防万一,可以在下图中看到TXT控制器的内部:
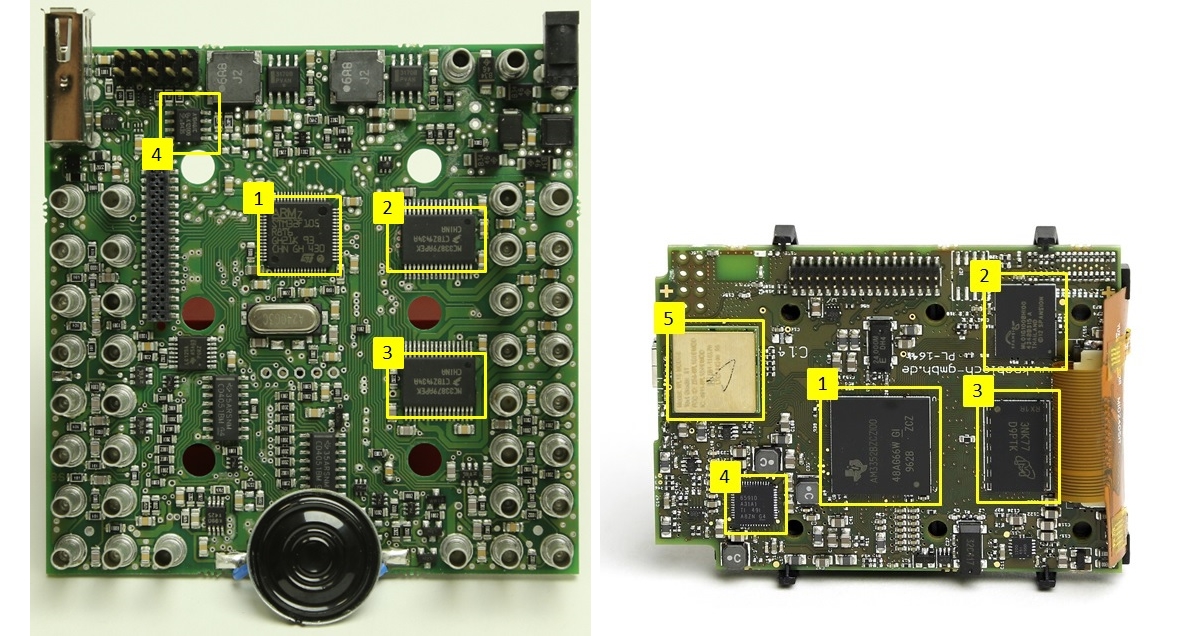
在左侧电路板上:
- ST STM32F105R8T6 -ARM Cortex-M3微控制器。
- MC33879-输出驱动器。
- MC33879-输出驱动器。
- TJA1040 -CAN总线串行驱动程序 。
在右侧电路板上:
- TI AM3352B -ARM Cortex-A8微控制器
- Spansion ML01G100-SLC NAND闪存64MB。
- 三星K4B2G-DDR3L 1600 DRAM 128 MB
- TPS65910-电源管理模块。
- WL18MODGB (5)组合WiFi +蓝牙模块。
该套件的一个重要功能是提供了用于计算机视觉实验的硬件和软件。 为此,该套件具有带USB接口的摄像机,而ROBO Pro工具软件具有计算机视觉功能库和用于设置和调试的配置器。

计算机视觉库包含以下用于处理视频帧的基本功能:
- 计算视频帧给定区域的平均亮度。
- 为视频帧的给定区域搜索相同颜色的光栅元素序列。
- 搜索几何图形,计算坐标和尺寸。
- 视频帧区域中的运动检测器。
ROBO Pro软件中包含的计算机视觉子系统配置器:

ROBO Pro工具软件
为了开发TXT控制器的控制程序,建议使用教育工具软件ROBO Pro,该软件包括算法框图的编辑器,基本程序元素库,应用程序功能库,调试和远程控制工具。 ROBO Pro软件是设计套件的一部分。 另外,不需要购买它。
通常,编辑器窗口如下图所示:
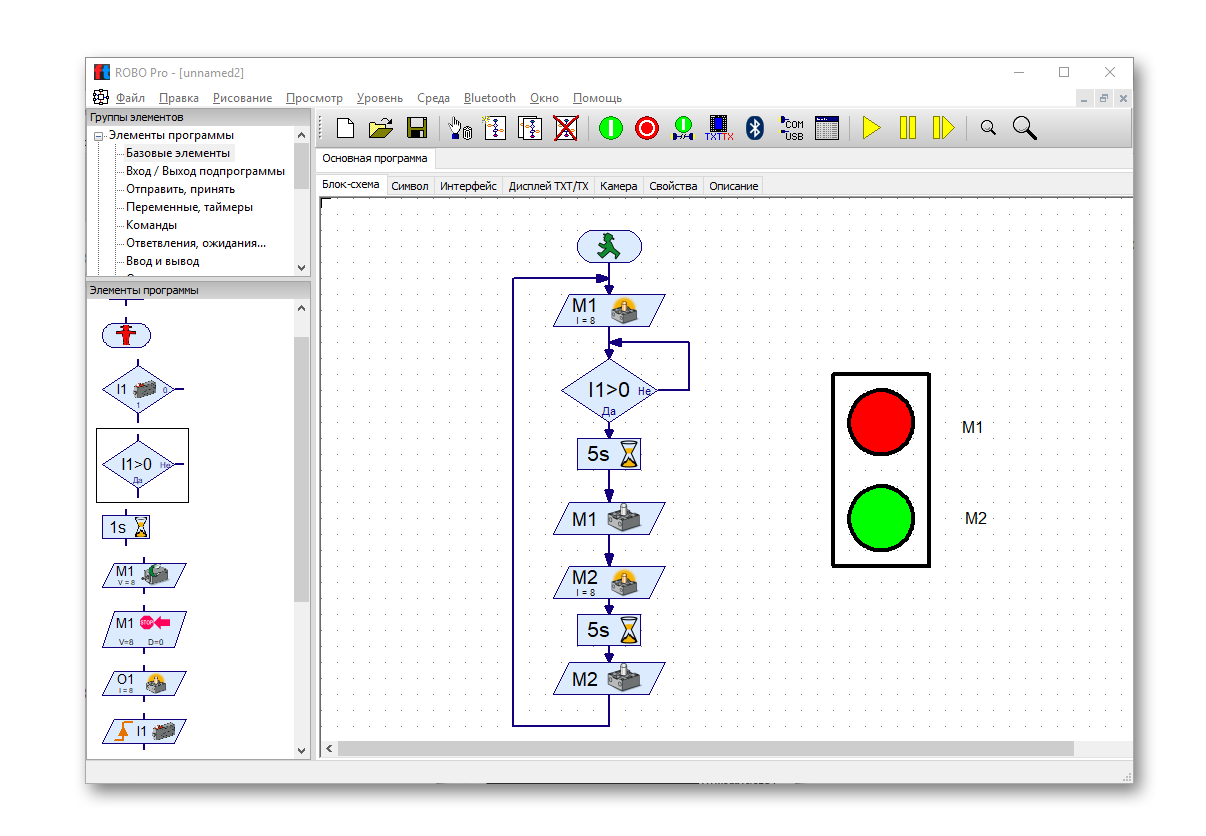
控制算法以传统经典流程图的形式进行编译-如专业IT文献和技术文档中所惯常的那样。 您当然可以合理地问我:-Scratch呢? 为什么在MK ATMEL或PLC SIMATIC算法的文档中以流程图的形式而不是从头电路的形式描述它? 在这里,我很难合理地回答你。 但是,我的内部工程师很高兴有机会以自然的方式使用普遍接受的视觉工具,让初次接触自动控制技术的孩子们。
以防万一,技术文档中的算法 :

在编辑器中编译的流程图可以以两种模式执行-在仪器机器上本地执行或通过下载到目标机器上进行远程执行。 第一种方法便于调试。 在算法执行期间,您可以使用逐步执行并突出显示算法的当前步骤。
对于高级用户,ROBO Pro具有多线程算法支持。 还支持将算法分解为过程,并且还可以将用户界面元素直接放置在流程图中。
用户界面元素库具有一个记录器/示波器,千分表和用于输入和输出数字值的字段。 对于初学者和高级用户来说,这都是非常重要的功能。 实时记录数据和进行后续分析的能力大大简化了对新控制算法的研究,并显着减少了设置时间。
这是一个更复杂的项目的编辑器窗口的外观:
附加套
套件328328的功能可以通过ROBOTICS系列的其他套件进行扩展:
它们与524328构造函数的区别在于没有TXT控制器。 假定在解决了集合524328中的所有问题之后才发生向这些集合的过渡。
项目实例
我准备了一些视频,这些视频揭示了标准构造函数TXT Discovery集的一些(但绝不是全部)可能性,而没有其他细节。 示例中的所有项目都在github上 。 我很高兴在评论中回答您的问题。
两种简单的交通信号灯算法:
在ROBO Pro中使用用户界面元素和视频广播进行远程控制:
基于计算机视觉的带有反馈的购物车自动控制。 使用比例调节律。 比例链接的增益KP = 3.5。 可以看到,手推车沿着路线不稳定地移动-它摇摆并最终离开轨道。 注意参数记录器。 它使您可以量化运动停止后的过冲值:
行为不稳定的原因是,当手推车旋转时,即使比例连杆的控制作用为零,惯性力仍会继续转动手推车。 结果,我们看到手推车如何滑行,然后开始朝相反的方向转动-动态系统中发生振荡。 这种行为大大降低了控制质量,在某些情况下可能导致故障。
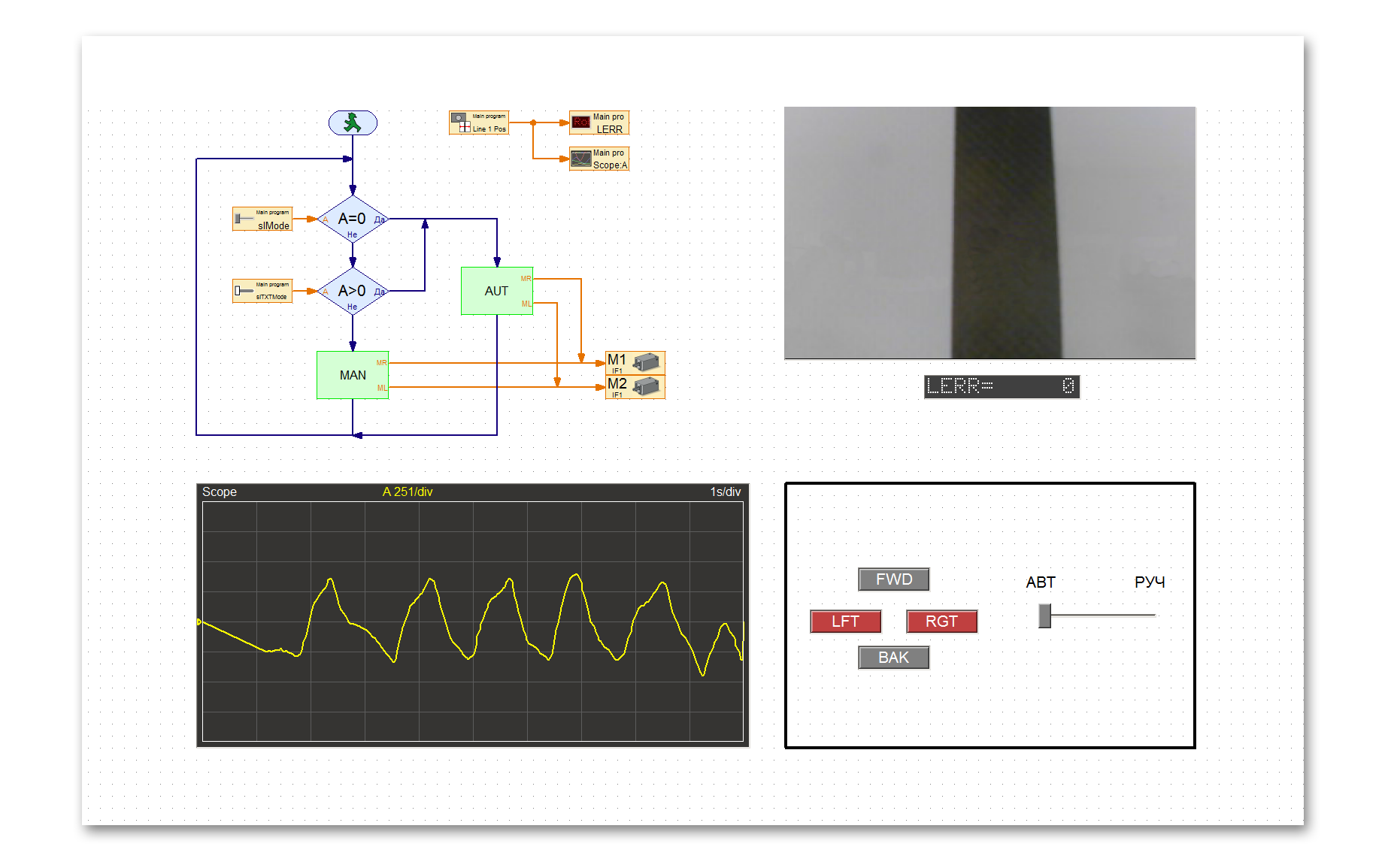
为了抵消惯性力,在控制器的结构上增加了一个微分元件,该微分元件在控制器的输入端形成与失配变化成比例的信号。 设置系数KD = 6.0并观察手推车的行为:
现在,机器人稳定地通过了轨道。 请注意记录器上的绿色信号-这是调节器的差分链路的输出信号,当机器人返回轨迹时,它有助于“放慢”机器人的转动速度。
结论
上面,我举了一些使用524328 ROBOTICS TXT Discovery套件组织有关自动控制理论的实践练习的示例。 给出的例子非常干燥,没有理论计算。 我认为在以下出版物之一中,我将能够分享有关使用fischertechnik构造函数进行的自动化实践班级组织的最佳实践。 您对此感兴趣吗?
像往常一样,对于精通整个职位的工程爱好者来说,在Pakpak商店中,直到2017年12月31日之前,gktms1712代码均可享受15%的折扣。 荣耀给机器人!
参考文献
- 1983 BBC越野车训练龟的故事
- Seymour Papert-标志语言的发明者
- 用于TXT控制器的自定义OS构建
- 从零开始TXT控制器
- 适用于TXT控制器的Python