 无人机Martti。 照片:芬兰VTT技术研究中心有限公司/ Flickr
无人机Martti。 照片:芬兰VTT技术研究中心有限公司/ FlickrVTT芬兰技术研究中心开发了世界上第一辆无人驾驶Martti车辆,该车辆可在雪道上自动行驶。 此外,这辆车在
Aurora E8机器人车的10公里测试跑道上创造了新的速度记录。 这条赛道位于芬兰Muonio,这
是一份路线图,显示了机器人的基础设施位置 。
Robocar Martti是在大众途锐底盘上制造的。 德国SUV配备了摄像头,传感器,天线和激光雷达。
与Martti并行,VTT工程师正在测试另一台Marilyn无人机。 它们在传感器的位置上有所不同。 例如,在马蒂(Martti),三台激光扫描仪研究汽车前方的空间,而在玛丽莲(Marilyn),两台扫描仪向前看,一台向后扫描。
VTT项目经理Matti Kutila解释说,Martti自动驾驶仪是专门为在恶劣天气条件下驾驶而设计的,其“姐妹”玛丽莲(Marilyn)是为城市道路设计的。 Marilyn自动驾驶仪是于2017年春季开发的,因此可以在考虑GPS坐标和传感器随附的有关其位置的本地信息的情况下进行移动。 今年秋天,Martti自动驾驶仪达到了相同的发展水平。
Marilyn的软件开发需要付出更多的努力,因为它的自动驾驶仪是从头开始创建的,但是Martti已经使用了现有软件,该软件已经过配置并适应所需条件。
在视频上:在没有标记Aurora E8的雪地轨道上自动驾驶电影。 尽管道路的轮廓实际上是不可见的,但汽车确实可以保持在右侧并可以转弯。
Martti在Muonio的高速公路上通过了连续的24小时测试,此后他设法以40 km / h的速度刷新了纪录。 开发人员认为,这是在没有积雪的情况下,在积雪的道路上全自动驾驶在积雪的道路上创造的世界速度记录。 记录可能会更多,但是自动驾驶仪不允许随意选择最大速度,将最大值限制为40 km / h。
现在,芬兰工程师正计划尝试光学元件的特性。 通过更改波长,您可以尝试提高雷达的分辨率。 该软件中将添加新功能,以处理来自传感器的数据,这将改善汽车在湿滑的道路上以及在能见度有限的情况下(当传感器看不到道路边缘(例如,一切都被雪覆盖))并且由于大雾而沿途难以观察时,汽车的动作。
显然,芬兰程序员的发展-在没有积雪的雪地道路上行驶-比其来自加利福尼亚的同事的成就更适合俄罗斯的条件(Waymo / Google),那里的道路条件与俄罗斯的根本不同,并且在冬天温度很少会低于+ 15° C. 俄罗斯开发商也了解这一点:例如,11月底,Yandex公司告知要在冬季条件下测试自动驾驶仪。
YouTube上发布了基于丰田普锐斯混合两厢车的两个原型赛车的
视频 。
VTT工程师正在逐步扩展无人驾驶汽车的功能,系统地增加新的工作条件:城市街道,高速公路,积雪,高速公路出口和路口。 同时,最大自动驾驶速度正在逐渐提高。
直到1月中旬,开发人员计划为Martti配备通信模块,以从数字运输基础设施接收数据-包括具有特定汽车数据发送器的特殊基站。 在芬兰,已经启动了
5G-SAFE项目,以开发自动驾驶车辆的道路基础设施,服务和物流,将来,这将构成道路交通的绝大部分。
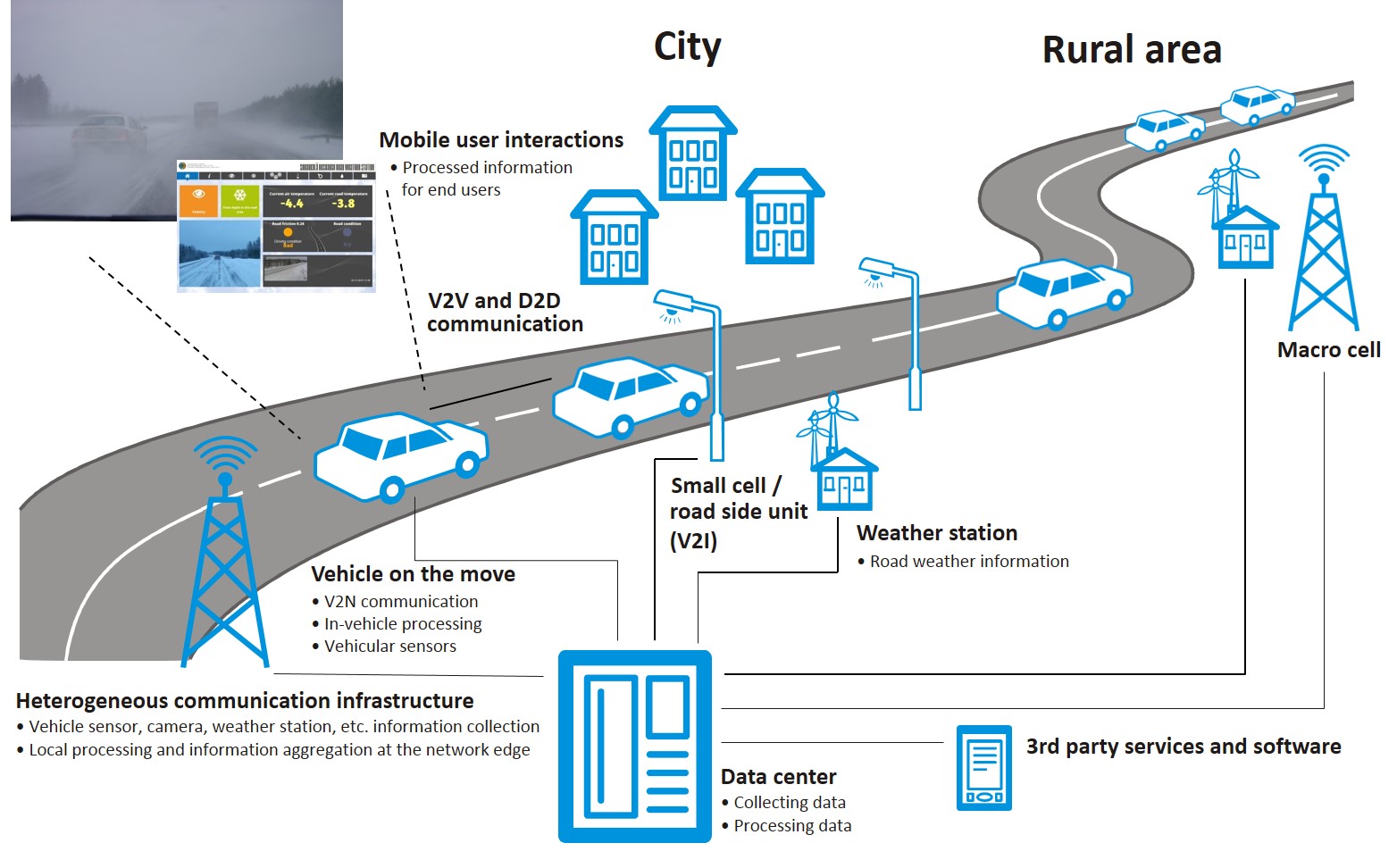 5G-SAFE项目
5G-SAFE项目明年春季,芬兰技术研究中心计划发布另一种版本的自动驾驶仪,该自动驾驶仪可以沿着森林道路行驶,也就是沿道路行驶。