新的成像系统,显微镜和视频矩阵基于计算机计算而非传统镜头生成数字图像。
甚至中世纪的工匠也能够制造出玻璃透镜和曲面镜以投射图像。 这种结构被用于制造显微镜,针孔照相机,望远镜和其他仪器,使我们能够更好地看到远近,地球和天空中的大小物体。 图像形成的下一次革命发生在19世纪中叶:摄影术被发明。 现在,您可以捕获“停止的时刻”,进行播放并复制。 如今,化学摄影时代已接近尾声,新时代正在绽放-数字成像。 它的根源在于电视技术,但我们将考虑1975年第一代数码相机的出现。 如今,全球手机中数十亿个网络摄像头和相机每年可捕获超过一万亿张图像,其中许多图像会立即上传到Internet。 尽管使用成像系统的数量,种类和方式呈爆炸性增长,但是光学工程师的任务基本上保持不变:创建高质量的光学图像,准确地传达场景,使其“看起来不错”。
但是,在过去的10到20年中,一个新的范例已经开始出现:计算成像。 这种范例可能不会完全取代传统方法,但是它将使人们对已有数百年历史的构想产生怀疑,并有助于创建用于设计成像系统的替代方法。 例如,我们已经可以使用成像系统的新功能和形式,包括用于拍摄宏观物体的超小型设备和不带透镜的显微镜。
顾名思义,计算在最终数字图像的形成中起着关键作用。 长期以来,它们在数字图像处理的帮助下得到了改善:它们消除了用闪光灯拍摄时的红眼现象,调整了色彩等,但是从未设计过考虑这些需求的镜头光学电路。 但是,数字信号处理允许,例如,校正诸如“枕头”之类的光学畸变或图片边缘处的广角畸变。 当哈勃轨道望远镜在1980年代后期向地球发送第一批图像时,它们比预期的更加“潮湿”。 很快就发现光学器件存在一些问题。 NASA的科学家确定了问题所在,并且在修理望远镜之前,他们使用复杂的数字处理算法纠正了许多缺陷,长达数年之久。
在1990年代中期,Wade Thomas Cathey和小Edward R. Dowski提出了设计镜头的想法,以产生模糊的,“退化的”图像,但退化的方式使得数字处理算法使使用传统镜头拍摄的图像不会变得更差甚至更好。 特别是,Katie和Dowsky转向了所有传统相机的特征:景深有限。 如果将焦点对准与您平均距离的物体,则该物体看起来会很锐利,但距离越来越近的物体会变得模糊。 景深是指所有物体看起来相当清晰的区域。 因此,两位科学家想出了一种新的镜头,该镜头几乎可以模糊所有距离的物体的光学图像。 然后采用特殊算法对整个图像进行锐化处理,从而获得普通镜头无法达到的景深。 尽管许多科学家进一步改进了所描述的技术,但是Katie和Dowsky的想法大大提高了计算捕获和图像形成的学科。
这项科学工作的另一个结果是,现在正在基于计算机而非人的图像创建的基础上开发用于镜头的光学电路。 矛盾的是,在我们的全面拍摄时代,很少有人看到照相机形成的真实光学图像。 日子已经一去不复返了,摄影师朝相机倾斜,用厚厚的斗篷遮住自己,拉出快门,然后在将暗盒插入胶片之前,在磨砂玻璃上看到由镜头直接形成的“实时”图像。 今天,我们在屏幕上看到对落在硅基体上的光学图像进行数字处理的结果。
光学和数字处理相结合的下一个应用领域是简化镜头设计。 在您的智能手机中,相机镜头可能包含7-8个光学元件,而专业相机镜头有时会包含15个以上的光学元件。 必须使用大量透镜来校正图像缺陷-任何光学系统固有的像差:彩色(物体周围的颜色重影)和光学(物体形状和比例的畸变)。 也就是说,需要复杂的镜头设计才能产生“好看”的图像。 光学和数字处理的结合将有助于将一些校正像差的工作转移到数字组件上,这将使您可以放弃一些光学元件,而不会影响最终数字图像的质量。 即,处理算法扮演虚拟光学元件的角色。 这种方法可以创建更紧凑,更便宜的光学系统,而不会降低质量。
这些想法将发展到什么程度? 成像任务可以从光学元件转移到数字组件的比例是多少? 光学电路能获得像样的图像有多简单? 摆脱镜片和镜子是否现实? 在过去的几年中,这是通过三种方式实现的:将透镜及其形成的光学图像完全排除在外。 这些方法基于衍射,光学相位重建和压缩感测技术。 为了获得适合人们的最终图像,积极地使用计算机计算。
传统的透镜使用折射来聚焦光束:当以不同的光速穿过介质边界(玻璃)时,光会折射。 由于折射作用,浸入玻璃杯中的铅笔似乎弯曲了:从铅笔反射的光在沿您的眼睛路径进入空气时被折射。 因此,我们看到的铅笔的水下部分不在实际位置。
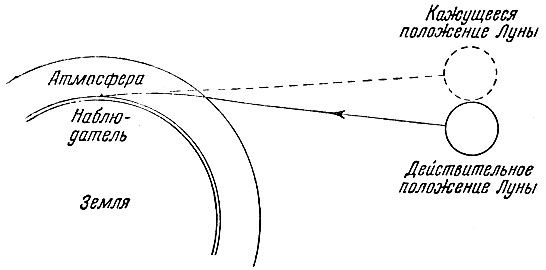
顺便说一下,由于空间与地球大气边界处的折射(折射),所有天体的位置似乎都比其实际位置略高:
像大型望远镜中使用的弯曲反射镜以不同的方式形成图像:使用反射 。 要了解折射和反射之间的区别,请以光线(线条)的形式想象光。
另外两个物理现象将有助于改变光的传播方向并利用其波的性质(记住波粒对偶性 ): 衍射和干涉 。 当两个相干的光波相遇时,它们会相互重叠,从而出现最终的波幅。 如果一个波的最大值总是与另一个波的最大值重合,则这些波会相互增强,这称为相长干涉 。 如果一个波的最大值总是与另一个波的最小值重合,则这两个波会相互抵消-这是相消干涉 ,其结果是光可以完全消失。
您可以通过将光定向到光滑表面上的衍射光栅(一系列最佳冲程(光栅))来控制衍射光。 由于不同长度的波在不同的方向上反射,因此会发生色斑。 例如,当白光从CD或DVD表面上的微小凹槽反射时,我们会看到彩虹条纹。 由于波长对光栅的依赖性,不可能创建仅替换透镜的衍射光栅。 光栅形成的光学图像看起来永远不会像设计良好的镜头所提供的图像一样好。 尽管如此,使用衍射光学器件(使用衍射)和匹配信号处理(考虑光学器件)的组合来创建可接受的数字图像还是很有可能的。
在用于宏观拍摄的一类非客观设备中,使用了微型衍射光栅,它们逐步位于透明材料(玻璃或硅酸盐)的厚度中,并使入射光的一部分相对于另一部分延迟。 阶梯式方案的数学性质使得材料中的光分布微弱地取决于波长,因此取决于玻璃本身厚度的微小变化,这在制造过程中不可避免地发生。 格子被附接到光敏传感器上 ,就像传统数码相机中的矩阵一样。 入射光穿过光栅并到达阵列,该阵列已被专门分解为“组件”。 它看起来完全不像普通的图像:一种人眼无法理解的模糊云。 但是,此云包含足够的视觉信息(尽管分布不正常),可以使用称为图像卷积的计算过程从其中重新创建所需的图像。
图像重建算法对视觉噪声(例如,从传感器到数字表示的信号转换过程中光子数的随机波动或电噪声)略微敏感(所谓的量化误差)。 因此,图像可能在视觉上有噪声。 尽管此质量足以完成许多简单任务(例如,计算一帧中的人数),但是,对于更体面的图像,您需要捕获有关所拍摄场景的更多信息。 “在额头上”的解决方案是采用几个微型相位光栅,这些光栅用于捕获有关场景的各种信息。 即,每个晶格形成一个分量数字图像,然后可以处理这些分量并获得一个更好的图像。
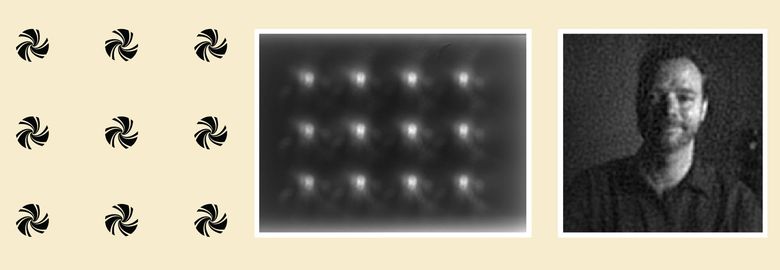
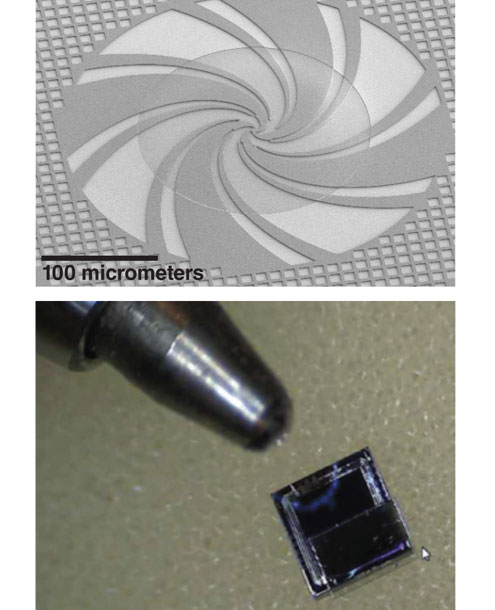
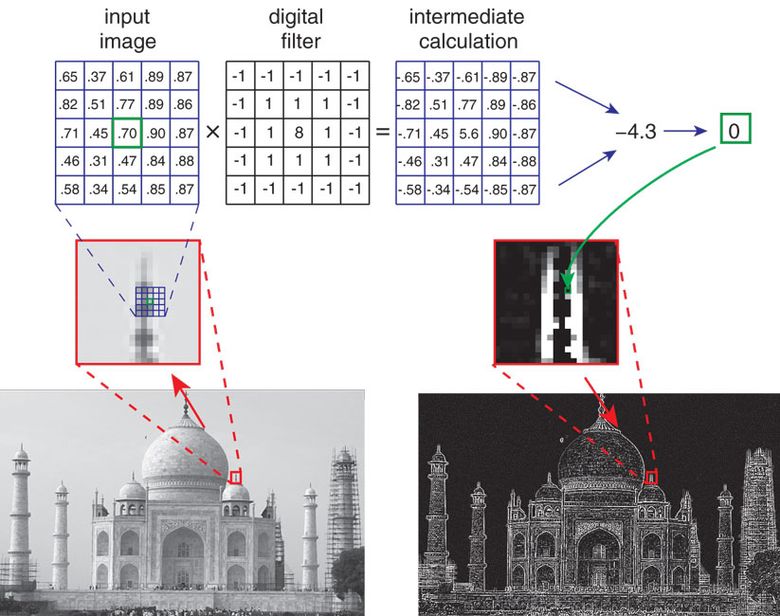
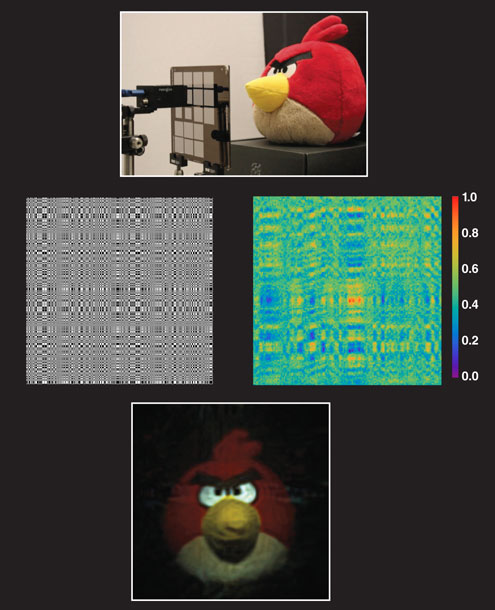
一种类型的无透镜成像系统使用散射光的阵列,而不是像透镜那样聚焦光。 在上面的示例中,设计了12个二元相微电网(左)的阵列,以捕获有关场景的尽可能多的视觉信息。 在光线通过阵列后,获得了12个模糊点,这些模糊点都无法使人了解此处(中间)的胶片。 但是,此光学图像包含足够的信息,可以使用称为“图像卷积”的数字处理来获得完全清晰的肖像(右)。
这种方法不仅有助于形成场景的图像,还有助于对其进行分析:确定视觉属性(例如,照片中是否有人脸),场景整体运动的方向和速度( 视觉流 ,视觉流),计算其中的人数在室内 在这种情况下,衍射光栅被设计为提取必要的信息,并且处理算法适用于特定任务。 假设,如果需要读取垂直条形码,则使用垂直衍射光栅和将数字图像的每个像素达到阈值的算法:将光转换为暗,将暗转换为黑。 结果是黑白数字图像,条形码读取算法已经可以识别出该图像。
相重建显微镜
创建偏光显微镜的方法不同于为宏观物体创建计算相机的方法,尽管此处也使用了衍射现象。 但是,与在太阳或灯产生的普通照明下拍摄场景的设备不同,只能选择来自一个或多个光源的相干激光辐射或单色光进行显微镜照明。 这使您可以控制光的衍射和干涉。 而且,我们感兴趣的物体是如此之小,以至于当光线穿过物体本身而不是通过人造衍射光栅时,就会发生衍射。
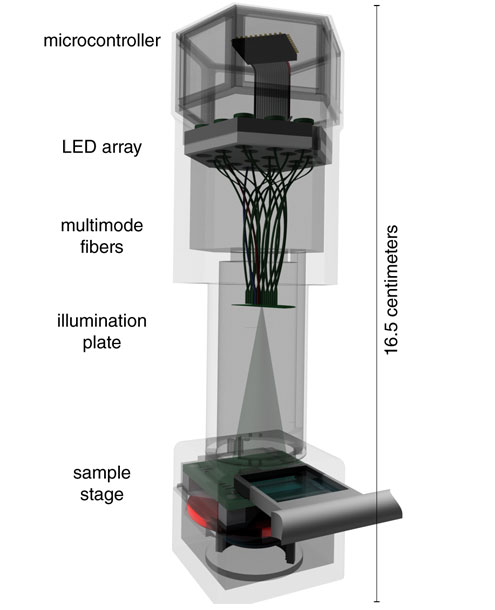
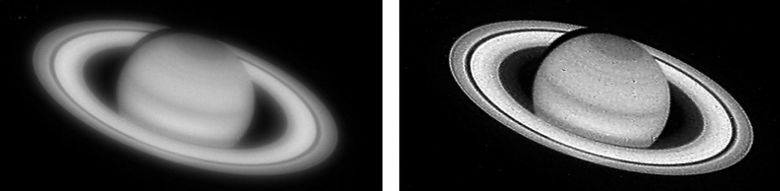
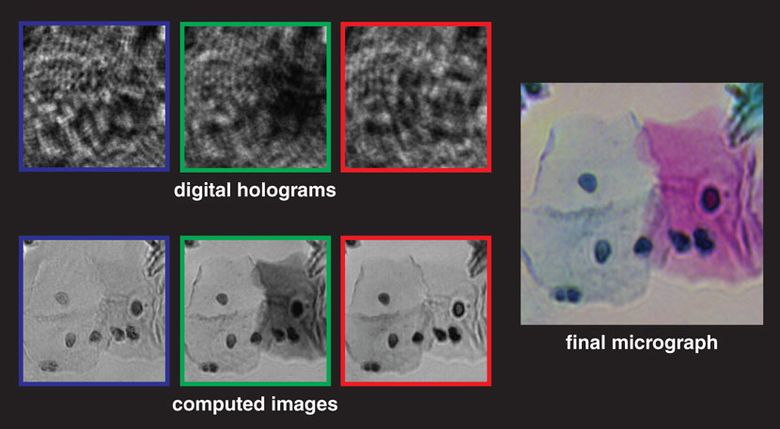
这种显微镜的方案意味着将样品放置在具有大量小像素的光敏矩阵的顶部:例如,在数码相机中经常见到的10兆像素的矩阵。 该方案也称为“芯片上显微镜”,因为样品直接放置在成像基质上。 激光或光谱纯色LED发出的光入射到样品上,并散射在要拍摄的物体上。 所形成的衍射光-形成物光束 (物光束)-叠加在通过样品的照明上而不会变形- 参考光束 (参考光束)。 结果是由光敏矩阵记录的复杂干涉图样,并用于数字在线全息照相中。 原始图像模糊地类似于样本的微观阴影,在某些情况下,足以大致计算出对象的数量和位置。 但是原始全息图像太混浊,嘈杂,包含“环状伪影”,并且无法确定物体的形态。 图片不好。
干涉图样经历数字处理的几个阶段,主要阶段是相位重建算法 。 其中,利用光学干涉的物理原理,得出了有关样品中物体结构和位置的结论。 简而言之:该算法在矩阵上搜索有关全息图中丢失相位的光学信息(该相位仅记录干涉图,而不记录单个光线本身的相位)。 该算法迭代地计算物光束中的相位信息,这很可能导致出现这种光学干涉图样。 确定有关物镜中相位的信息后,该算法会及时计算其变化,以构建物体图像,从而形成最终的数字图像。
与宏设备一样,通过捕获多个光学图像来提高分辨率,每个光学图像包含稍有不同的信息。 例如,在记录每帧之前,您可以稍微移动光源,样品本身或矩阵。 然后对这些帧进行处理和组合,以获得一个分辨率更高的干涉图像(这对于人类来说仍然是难以理解的),然后执行相位恢复和临时恢复的阶段。
芯片上的物镜具有多个优点。
首先,样品的拍摄面积(即视场)可能非常大,它仅受放置样品的光敏基体尺寸的限制。 现代矩阵可让您提供20平方毫米至20平方厘米的视野。
第二,即使透明物体(例如,水中的大多数细菌)也可以通过物镜显微镜进行研究,只要它们改变通过它们的光的相位。 特殊的物镜还可以研究这类“相物”,尽管视野和样品的总尺寸要小得多。
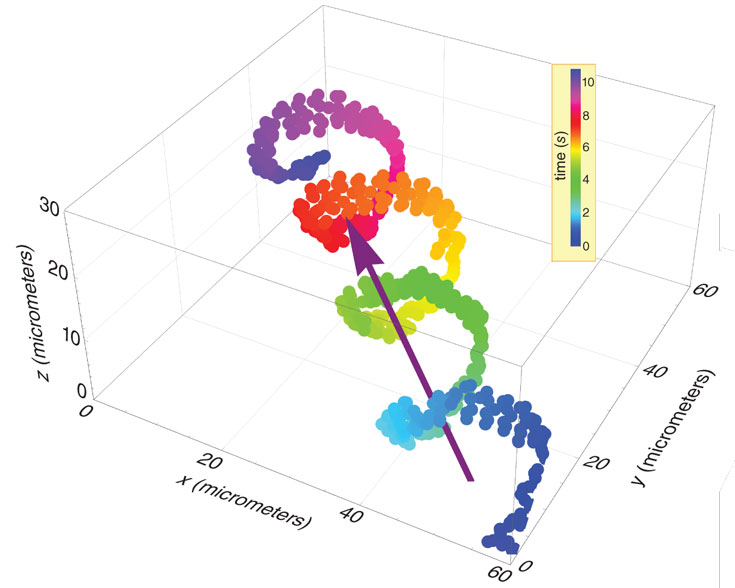
第三,光学图像的数字处理可以隔离不同类型的细胞(例如,毛细血管中的精细胞或血细胞)并跟踪其运动。 因此,医生和生物学家可以获得重要数据。
第四,这种显微镜比传统显微镜便宜得多并且紧凑。 无物镜显微镜可以连接到手机,用于农村地区,数字数据可以传输到任何地方以进行进一步的全面分析。
压缩感测技术
偏置图像形成的第三种方法是基于数学和信号统计的最新进展- 压缩感测技术。 矩阵上的光学图像是复数信号,以数字列表的形式显示,并由不同的算法进行处理。 由于复杂的声音信号由许多较简单的声音组成,并且每种声音都按正确的比例添加,因此图像由大量的较简单的图像形成。 一组简单的图像或信号称为基础 。 在声音领域,最常见的基础是一组纯余弦音。 声音有多复杂都没关系。 可以通过添加大量基本余弦波来创建从汽车喇叭到贝多芬交响曲的所有内容,每个基本余弦波都选择了必要的强度和时移。
在图像领域有什么类似的依据? 两个最受欢迎和最有用的视觉基础是二维余弦波和多分辨率小波图案的集合。 这些基本元素在数学上是优雅的,并构成了现代JPEG和JPEG 2000图像压缩方案的基础,您无需在数字图像中存储和传输每个像素的值,而是对描述不同分量基础信号幅度的文件进行操作。 结果,“压缩”文件比图像本身小得多。 几十年来,这些基础忠实地用作处理数字图像的工具,但并未导致开发用于开发光学电路的新方法;因此,没有光学元件可以很容易地引入任何基础。
让我们继续进行压缩感测。 从理论上讲,统计数据表明,尽管有关场景的信息是多余的(即可以压缩图像),但无需测量基准,随机样本的测量就足够了。 « », , ( ), compressive sensing. , , .
, (), . . «» , , (). , .
, -. (coded apertures) ( - ) . FlatCam (Ashok Veeraraghavan) . , (. ). — Angry Birds — ( ) . , , , . , . , . compressive sensing «» , .
.
, . , , , . 0,5 0,2 — , . FlatCam , , .
, , , , . , - , . , , .
. , , , , , , . , , , . , , , .
, . , - .