Shakey创建于60年代,是第一个能够分析其动作的移动机器人。 该项目的宏伟目标并未完全实现,但对机器人技术的进一步发展产生了重大影响。
Shakey项目的作者在AI Magazine的大篇文章中描述了机器人控件的布置方式。 在这篇文章中-最有趣和最重要的文本片段的翻译。 它的作者Peter Hart是开发团队的成员。 创建Shakey
Shakey项目是在斯坦福研究所(SRI International)人工智能中心的倡议下于1965年1月启动的。 该研究所提议开发一种用于智能应用的“智能机器”。 但是工作组有不同的动机。 他们希望创建一个测试站点,以连接人工智能的所有领域(系统表示,推理,计划,机器学习,计算机视觉和对自然语音的理解)。
在开发Shakey时,工程师遵循两个规则:
- 机械结构需要保持尽可能简单-因此,机器人上没有安装单个机械臂;
- 为了避免以后进行缩小设计的工作,将电子机架安装在顶部。
由于Shakey的机械和感官功能受到限制,因此项目团队为机器人创建了一个健壮,简单的实验环境-六个房间内有大型几何块。 这些块被涂成可以被低分辨率相机识别。
Shakey的第一台计算机是SDS 940,其内存比现代笔记本电脑的L2缓存少。 1970年,它被功能更强大的DEC PDP-10取代。 Shakey通过通信处理器与PDP-10进行了交谈。 该系统是促成ARPANET诞生的那些节点之一。 大约在同一时间,开始完全重写Shakey软件。 铁只需要最小的改进。
关键Shakey设计元素Shakey软件
该产品的第二个版本基于两个基本思想。 首先是通过
一阶谓词演算来表示Shakey的世界,并用网格模型(第一个版本的关键组成部分)对表单进行补充。
第二个想法是将Shakey软件构建为多层。 第一次使用这种控制机器人的方法。 接下来,我们简要介绍每个级别,从较低级别的命令开始。
低级团队低级命令(例如ROLL和PAN)直接发送到Shakey硬件组件。 在此级别上,还设有诸如PANTO之类的团队,负责将设备的“头部”朝所选方向转动。
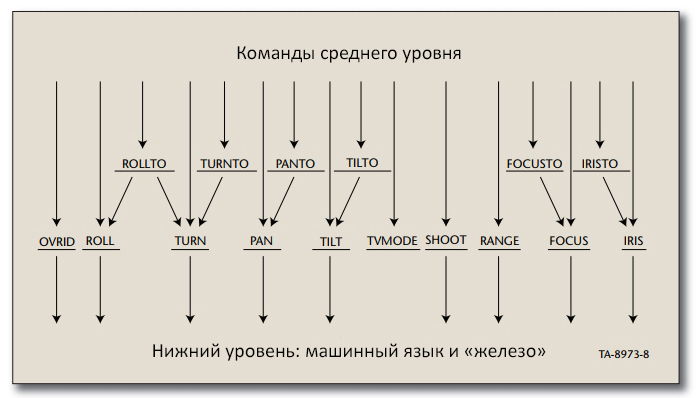 中级团队:马尔可夫链
中级团队:马尔可夫链在这个级别上,有诸如GOTHRUDOOR(“走进大门”)之类的团队。 由于它们都被表示为
马尔可夫链 ,因此被分配到一个单独的级别。
马尔可夫连锁店(GOTHRUDOOR团队)通过首先扫描左列直到达到执行相应操作的第一个真实条件,然后返回表的开头,才能“读取”马尔可夫链。 因此,马尔可夫链的特征在于稳定性(这种动作算法略有简化,但是“重返起点”的实践是基础,并且正如我们将看到的那样,这些链的重要特征)。
如果中级团队是Shakey可以执行的最后一支,则机器人的动作将非常有限。 他只能实现只需要一项预编程动作的目标。 为了做更多的事情,Shakey必须能够制定一系列行动(作为计划)。 自动调度程序STRIPS(斯坦福研究院问题解决者)负责此工作。 他是下一个更高级别的软件。
STRIPS,斯坦福研究所问题解决者由于两个重要概念的结合,出现了自动调度程序STRIPS。 首先是一种计划策略,称为目标和手段分析。 它由赫伯特·西蒙(Herbert Simon)和艾伦·纽厄尔(Allen Newell)在“一般问题解决器”系统中进行介绍。
第二个概念是谓词演算中定理的证明及其在问答系统中的应用。 Cordell Green的工作对此进行了讨论。 理查德·菲克斯(Richard Fykes)和尼尔斯·尼尔森(Niels Nielson)结合这些知识,于1971年创建了STRIPS,该工具使用目标和均值分析来计算谓词。
PLANEX,计划执行主管创建STRIPS后不久,研究所团队找到了一种方法,可以通过用变量替换系统中的常量来推广STRIPS计划。 他们还发明了一种称为三角表的数据结构,该数据结构演示了通用计划的内部相互依赖性。 这些设计构成了PLANEX系统的基础,这是Shakey软件的最新级别(Fykes,Hart和Nielson,1972年)。
使用此软件,PLANEX可以监视计划的实际实施。 系统可能会注意到是否出了点问题,并从那时开始重新安排工作,并在可能的情况下重用现有计划的某些部分。 这甚至可能是一个“创业”决定:如果Shakey突然接近完成任务,他可以将其转化为自己的优势。
这种检测和恢复错误的能力是Shakey软件的重要组成部分。 为在现实世界中可能会出问题的现实机器人创建动作计划与仅打印符号计划的“抽象”调度程序之间存在很大差异。 PLANEX和Markov链成为实现可靠的实际计划的解决方案。
Shakey软件级别层次结构电脑视觉
最初的项目计划不需要在计算机视觉领域进行深入研究。 相反,该计划是将现有的计算机视觉技术集成到实验平台中。 但是,事实证明,当时可用的技术很少,因此专家们不得不在计算机视觉研究领域中努力工作。
这项工作的重要成果之一是发明了所谓的Hough变换的现代形式,这是一种用于从图像中提取元素的方法(R. Duda,P。Hart,1972)。 这是通过结合两个乍一看似乎完全不相关的概念来实现的。
第一个想法包含在Paul Hough专利中。 它描述了从图像平面中的点到变换空间中的直线的变换。 后者中的相交线对应于形状中的共线点。 但是出现了无穷斜率的问题,这使得该变换在计算上很麻烦。
第二个想法来自所谓的整体几何。 数学家有理论上的理由使用线的角半径的参数化,而不是霍夫使用的更熟悉的斜率截距。 彼得·哈特(Peter Hart)指出,当用正弦曲线代替线性霍夫变换时,不仅可以解决无限斜率的问题,而且新变换对于坐标的选择也不会改变。 此外,彼得·哈特(Peter Hart)和理查德·杜达(Richard Duda)将该方法扩展为检测图像中的分析曲线,并且此转换从此就被使用。
导航和A *算法
Shakey必须将注意力集中在地形上,因此开发了几种最短路径算法。 其中一个名为A *,是由彼得·哈特,尼尔斯·尼尔森和贝尔特拉姆·拉斐尔创建的。 新算法具有非常有用的属性:首先,它总是找到最短的路径,其次,它选择了最少数目的替代可能性。 我们可以说它总是有效并且在计算上是有效的。
您可能会认为,如此重要的结果会很高兴地欢迎任何出版物,但事实却恰恰相反。 A *算法的提出被当时所有著名的科学期刊所拒绝。
浏览这些旧的评论,您可能会认为由于所有这些令人恐惧的定理,编辑们都向数学家提供了一份阅读报告。 但是,数学家没有留下深刻的印象,因为从证明中只给出了节点数量有限的图。 那时,在作者看来,数学家们并没有看到具有十个节点的图和具有十万亿个节点的图之间的区别。 但是对于从事计算机科学领域的科学家来说,这种差异是巨大的。
最后,该报告被电气和电子工程师协会(IEEE Transactions on Systems Science and Cybernetics)接受,并被引用超过45年。
当时的世界
上面给出了Shakey项目团队所做工作的一部分(尽管远不及全部!)。 为了在更广泛的社会背景下了解这项工作,让我们看一下当时的知识和文化氛围。
1970年,在流行的《生活》杂志上发表了有关Shakey项目的重要文章。 作者,记者布拉德·达拉赫(Brad Darrach),似乎在标题上走得太远:“凭自己的思想,机器的迷人而可怕的现实。” 但是,尽管有些人认为机器人可以奴役整个世界,但其他人则对此类文章持怀疑态度。 从哲学的角度来看,休伯特·德雷福斯(Hubert Dreyfus)就是其中之一,他认为AI的概念基本上是不现实的。 在Darrach和Dreyfus之间的某个地方,有些人担心机器人可能有一天会承担人类的工作。
Shakey的《生活》杂志帖子key客
机器人的开发人员欢迎所有对他们的工作感兴趣的访客。 回顾所获得的反应还说明了当时的世界状况。 以下是一些示例:
- 一群小学生参观了实验室。 陪同他们的老师问工程师们做了什么“真正的工作”:“这个机器人是您的爱好,对吧?”
- 将军问是否可以在机器人上安装36英寸的刀。
- 电影《 2001年太空漫游》上映后,亚瑟·克拉克立即访问了实验室,但他对谈论《纽约时报》对这部电影的评论比对讨论机器人的未来更感兴趣。
- 一名高中生从西雅图开车去加利福尼亚的门洛帕克去看Shakey。 数十年后,比尔·盖茨(Bill Gates)回忆起他所看到的令人印象深刻。
- 美国政府的一名审计员问,SRI是否真的负责交付数十亿个“数据包比特”。 紧随其后的是其他问题,包括是否在这些钻头上发现了腐蚀。
Shakey项目完成
Shakey项目于1972年关闭-不是因为缺乏想法,而是因为缺乏资金。 在其存在期间取得了什么成就?
关于该分数的意见与团队成员的意见一样多,但是可以进行以下概括:
- 该项目的许多私有结果(STRIPS,PLANEX,A *算法以及新形式的Hough变换)已成为一项重大的技术贡献。
- 总体而言,Shakey是一项重大成就。 他既是第一个移动智能机器人,也是第一个将带AI的软件与物理硬件相结合的系统。
- Shakey在机制和软件方面的一般能力尚未达到最初的期望。 考虑到最初的高要求,这不足为奇。 实现某些既定目标花了数十年,而另一些目标仍未解决。
参考文献:
1.“ Shakey:从概念到历史。” 原始文章。 资料的第二部分讨论了Shakey项目发现的进一步应用。 前往
2.“重做Shakey机器人需要多少钱?” -尝试在现代条件下重制Shakey。 前往有关机器人技术的更多信息,请访问robo-hunter.com:科普: