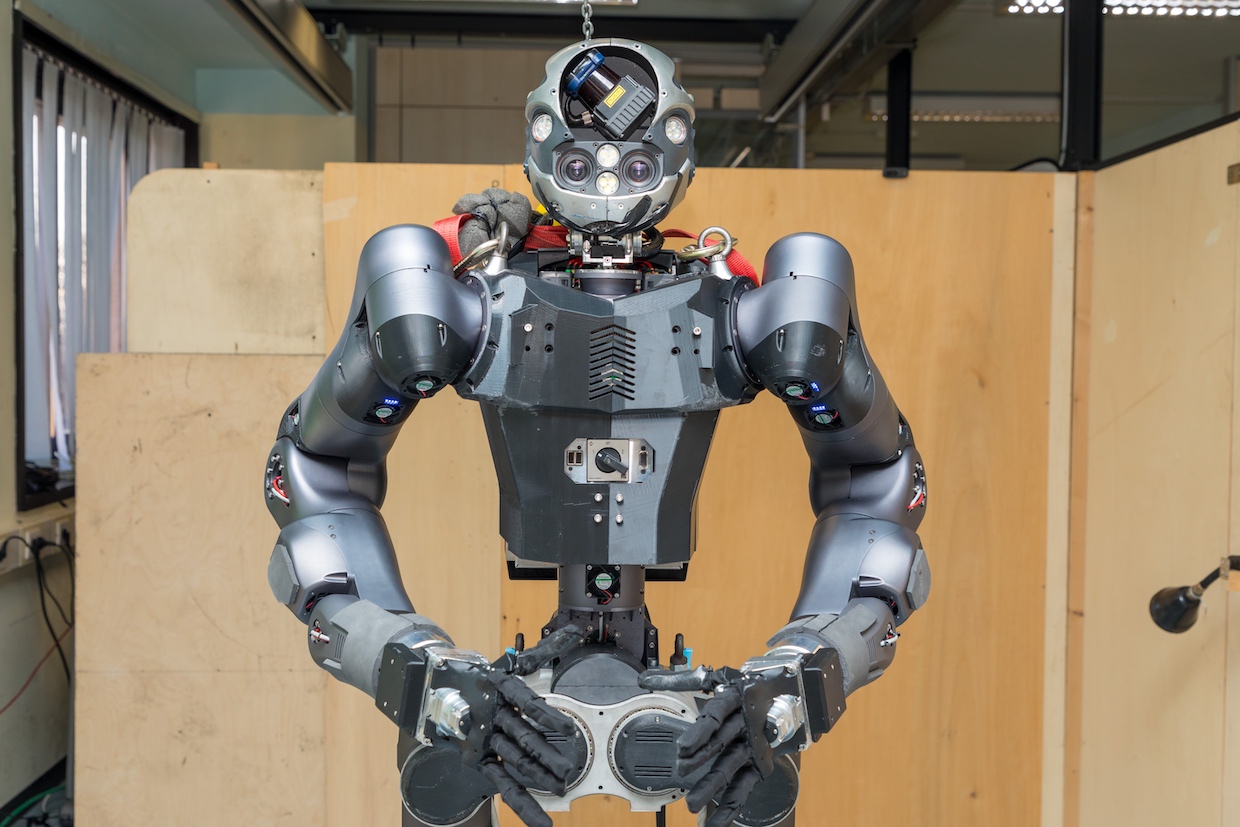
 步行者。 照片:IIT / WALK-MAN项目
步行者。 照片:IIT / WALK-MAN项目在过去的几年中,意大利理工学院(IIT)的工程师一直在努力升级
WALK-MAN (全身自适应运动和操纵)机器人。 这种人形机器人类似于波士顿动力公司著名的
Atlas机器人。 但这是为解决比搬运仓库中的货物更严重的事情而创建的-帮助发生技术事故的人员,分析瓦砾和灭火。 她于2015年6月在DARPA机器人挑战赛上首次露面。
这项工作是由IIT的一个小组进行协调的,但是实际上,来自欧洲许多研究组织和大学的科学家和工程师都参与了这项工作。 得益于欧盟委员会的资助,WALK-MAN已成为一个真正的国际项目:每个人都在各自的领域内工作并负责特定的模块或子系统:从软件模拟器到伺服驱动器和操纵器。
WALK-MAN项目已经进行了五年。 现在,工程师已经对机器人进行了重大升级,之后就该进行测试和演示了。
第一个WALK-MAN模型比现代
模型看起来更笨拙。 但是即使那样,它还是一辆强大的汽车。
第一个模型是WALK-MAN。 照片:IIT然后,开发人员注意到所有组件都是100%的新设备。 它的主要特点是使用特殊的强大引擎,能够为每个关节提供几千瓦的峰值功率。 机器人的设计旨在减轻机器人的重量并改善其动态特性,大量传感器监视负载,温度,机构和电子设备的状态。
新版本经历了重大的现代化。 该机器人收到了由铝,镁合金和钛制成的全新车身。 结果,可以将体重从133kg减轻到102kg。
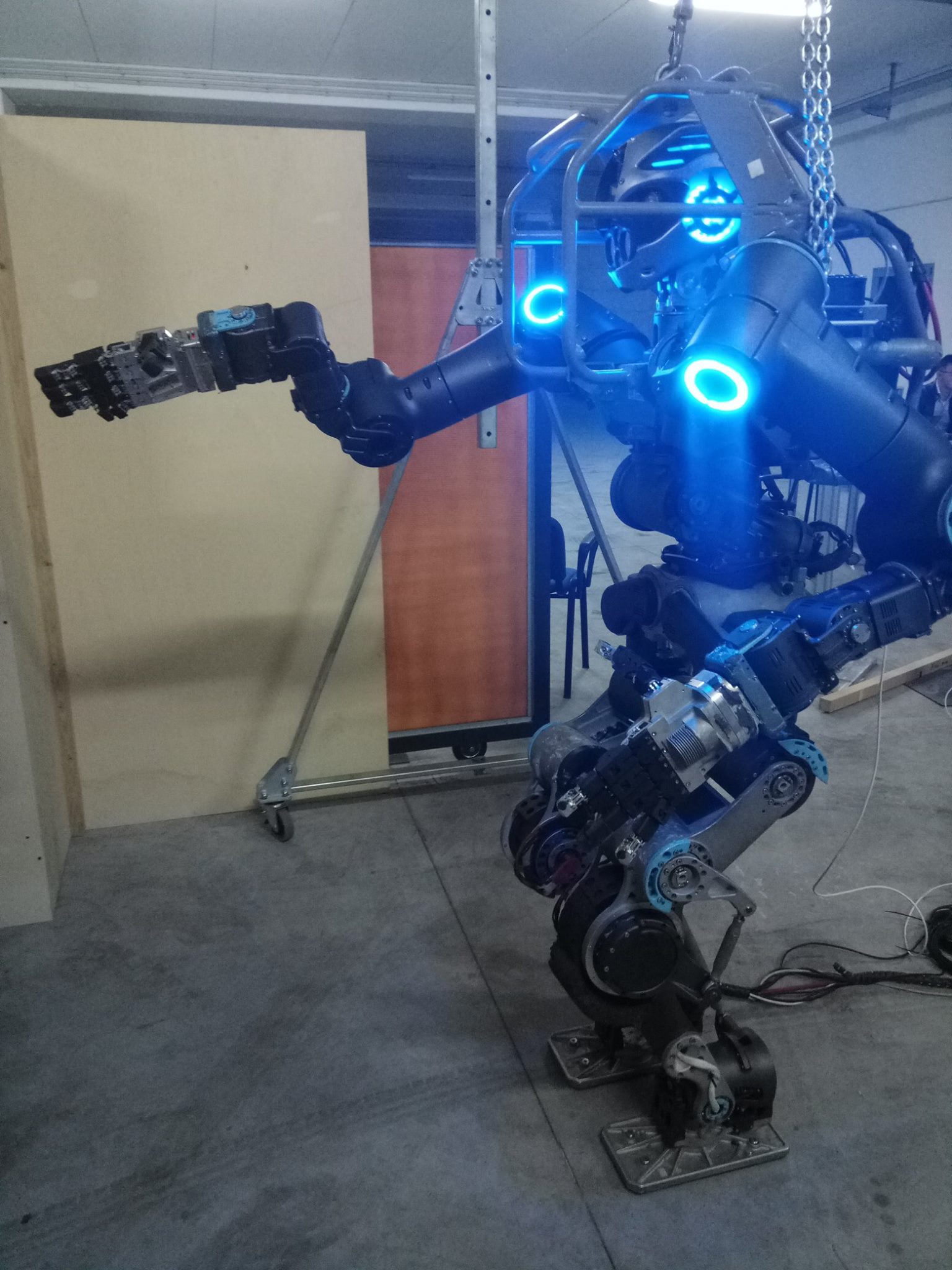
由于重量的减少,尤其是皮带上方的重量的减少,机器人显着增加了动力,动作的清晰度,保持平衡的能力-所有这些都是非常重要的特征,必要时可以在计划使用的自然灾害,灾难或事故现场采取行动。 新的动力驱动器安装在车身上部,即使使用1 kWh的较小电池,该机器人也可以自主工作约两个小时。
机器人的尺寸在宽度和厚度上都减小了,因此他更容易进入瓦砾中间和走廊的狭窄开口。 与比萨大学的工程师一起,开发了新的生物形态“手”-具有19个自由度的机械手,可以安全地捕获各种物体。 有足够的力量可以承受10公斤的负载超过10分钟(以前的型号举起7公斤)。
作为初步演示的一部分,WALK-MAN参与了在遭受地震破坏,煤气泄漏和火灾的工业工厂中进行救援行动的模拟。 也就是说,在对人类工作来说太危险的条件下-在这种情况下,最好使用机器人。 无论汽车多少钱,它总是比人类生活便宜。
该视频显示了机器人如何在建筑物周围移动,转动阀门,解锁门并打开灭火器。 大约80%的时间由操作员控制机器人:自动驾驶仪仅负责某些局部功能,例如保持平衡,某些身体运动等。
开发人员注意到软件和计算机功能有了显着改善。 现在,WALK-MAN能够实时使用复杂性不断提高的可靠控制模块。
应该注意的是,在2015年DRC比赛中,第一版机器人表现不佳,仅克服了8个障碍中的2个。 现在,许多问题已得到解决:WALK-MAN变得越来越容易和强大,因此它现在更适合在人类环境中工作,它移动更快,更稳定,消耗更少的能量并执行更复杂的协调运动。 设计师在不久的将来将面临的主要任务是自主权的逐步提高和更高的工作速度,包括更快的行走。 如视频中所示,尽管名称叫WALK-MAN,但移动仍然非常缓慢。