 麻省理工学院仿生机器人实验室开发的创纪录机器人
麻省理工学院仿生机器人实验室开发的创纪录机器人在某些游戏中,AI会打败一个人。 但是有些任务通常不会将一个人视为竞争对手。 在这里,机器人只能互相竞争。 组装魔方就是典型的此类任务。
2016年11月,英飞凌科技股份公司的机器人创下了魔方魔方组装的世界新纪录:
在0.637秒内完成了组装 ,打破了之前的0.89 s的记录。 但是
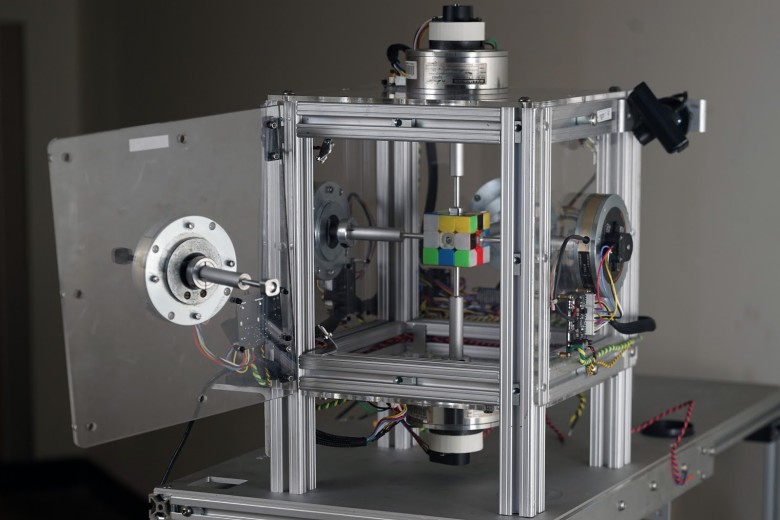
,麻省理工学院仿生机器人实验室的学生超过了欧洲工程师。 他们的机器人在
0.38秒内完成了任务。 这是一个“肮脏”的时间,其中包括按下“开始”键,图像识别并计算动作顺序。 任务本身的机械部分大约需要335毫秒。 在基于
min2phase的
程序中解决问题并发送指令-45毫秒。
实时视频的拍摄显然不适合人眼。 为了使不完整的人的感觉器官能够固定装配过程,并使人脑缓慢地意识到正在发生的事情,有必要将视频播放速度至少减慢几十倍。 以真实速度的0.03倍,某些东西变得清晰。
开发人员确信机器能够快速应对,但是这需要仔细优化高速相机上捕获的机械运动的时机。 在视频中,速度为0.03倍(放慢速度为33倍),值得注意的是,每次移动之后,立方体惯性的面都在来回停止之前来回移动。 因此,实际上90°旋转大约在10毫秒内完成,但是机器人将在15毫秒内完成下一个动作。 正是在这一部分中,可以显着优化流程。 但是该机器人几乎将以前的世界纪录翻了一番,几乎翻了一番,由于优化错误,立方体破裂或场效应晶体管爆炸了。 因此,我们决定保留原样。 但如有必要,学生可以从记录中“削减”另外100毫秒。
该设计使用以下细节:
- 6台Kollmorgen ServoDisc U9系列发动机(四台带有钕磁铁的N9M4T和两台UD9-E –它们具有相同的特性和性能)。 其中两个是从一个机械臂的旧项目中拿走的,其余的则是在eBay上廉价购买的。 每个引擎都装有一个带有eBay的US Digital 2000光学传感器。 尽管这些传感器为该实验提供了过高的分辨率,但还是设法以每台14美元的价格购买了这些传感器-全新,价格实在是太高了。 没错,要将传感器安装到发动机上,我必须进行一些修补。

- 6个定制设计的12伏电机驱动器。 STM32F303K8控制器在这里工作。 电路板组装在100伏晶体管上。 但是由于某种原因,在60伏特时,当立方体卡住时,其中一个爆炸了两次。 控制器固件 。

六个控制器之间运动的同步/协调由一个简单的逻辑板(AND Board)进行,该逻辑板从每个引擎接收有关运动开始/结束的信号,并向队列中的下一个引擎发送有关安全启动的信号。

- 2台PlayStation Eye相机分别拍摄三张脸。 与传统的网络摄像头相比,在Linux下以187 FPS的速度处理视频时具有非常低的延迟。 这些相机花了7美元就能买到。 没错,红色和橙色方块之间存在明显的区别,因此学生作弊了一点-然后用黑色涂料涂上橙色方块。
- 1魔方。 最便宜的之一 。
廉价出售这些立方体并不是徒劳的,因为在实验过程中有几块破碎了(参见视频)。 工程师写道,使一切正常运行的诀窍之一就是对多维数据集的所有细节进行真正的压缩。 如果零件彼此远离,则当您尝试快速旋转中心平面时,外部零件可以向外旋转。
组装分解良好的立方体通常需要19到23个步骤。 一些解决方案的总和比其他解决方案快(最快的解决方案包括21个步骤)。 因此,如果幸运的话,该任务将以大约30毫秒的速度解决。