抱歉,很长时间以来,我都没有对命名以及家庭自动化外围设备的乐趣。 具体来说,这个东西-灯光的遥控器-之所以出现,是因为我想要一个带有推扭式点击界面的东西,而不是通常分散的按钮。 效果还没达到:在家里,我没有注意到遥控器处于近距离范围,但是至少我关闭了格式塔。
简介TOR:
1)管理厨房中的三个照明组
2)管理房间中的三个照明组
3)同时管理所有光源
4)合理的电池寿命(从一周开始)
5)兼容Livolo编码,SC2260,EV1527
因此,如果您不喜欢Arduino,Livolo开关和中文收音机插座,则无需进一步阅读。 因为第一个是远程的基础,第二个和第三个是外围设备。
概念图
在我看来,控制逻辑如下:
- 按下“旋钮”可在环形(厨房-房间-一切)之间切换照明组的区域。
- 根据旋转方向旋转旋钮,可以打开或关闭所选组的照明。
- 通过不显眼的LED指示显示操作模式(选定的组)。
由于我是根据最不屑一顾的选项使用无线电控制的,因此没有受到干扰和反馈的保护,因此同时提供了一些技巧,以防错过操作。
如果旋转旋钮不能达到预期的效果,则同时按下和反向旋转组合键可以跳过该命令。 然后可以像往常一样重复该命令。
也就是说,如果我顺时针旋转旋钮而主灯没有点亮,则可以按下旋钮,逆时针旋转,然后松开并再次顺时针旋转以重复打开。
为什么这么辛苦? 然后,除了笨拙的协议外,我还拥有笨拙的外围设备。 例如,具有相同的打开和关闭命令的无线电控制的灯光开关Livolo和无线电继电器,以及普通的无线电插座,其中打开和关闭的命令是分开的。
团队跳过技巧可让您创造性地击败非包容性(non-inclusion),而不会破坏一般的照明方案。 此外,跳过命令可让您跳过不需要打开或关闭的光源。
好吧,当然,为了了解遥控器的状况,它有一个单独的指示器,在发送命令时会亮起。
如果在一段时间内未触摸控制台(在代码中配置),则控制器进入睡眠状态。 但是,他没有保存最后的状态,并且当他通过按下笔唤醒时,他从头开始了生活。
这不是一个错误。 我再说一遍,我有没有反馈的开关,并且控制台实际上无法获得有关每个受控外围设备当前状态的信息。
因此,在唤醒后立即转动旋钮即可打开或关闭从头开始的灯。
第一种方法
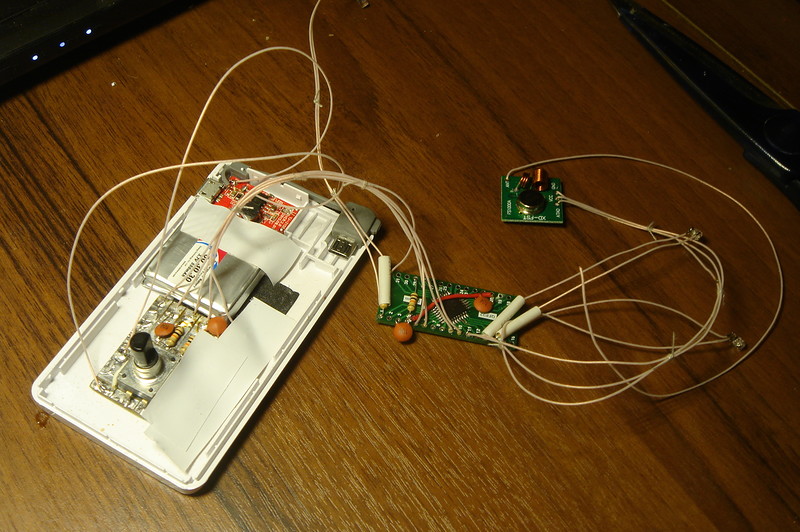
您可能会猜到,“带有扭曲的盒子”类型的视觉概念需要两件事:盒子和扭曲。 在第一个版本中,盒子的作用是由薄薄的移动电源发挥的,薄薄的移动电源可立即解决两个问题:我既有保护壳又有电池充电方案,还有连接器。 当然,电池本身必须更换为更紧凑的电池,否则填充物将不再适合。
结果变得更加复杂。 当我进行搜索时,我发现电位计旋钮越漂亮,其旋钮越大,其克成本与一克黄金成本越接近。 因此,我购买了一支笔,这种笔极少适合我的审美特性。

控制部分是使用ATmega328P进行实验的结果,以及现有家庭自动化(在相同的Arduino和原始无线电协议上)设定的故事情节的逻辑延续。
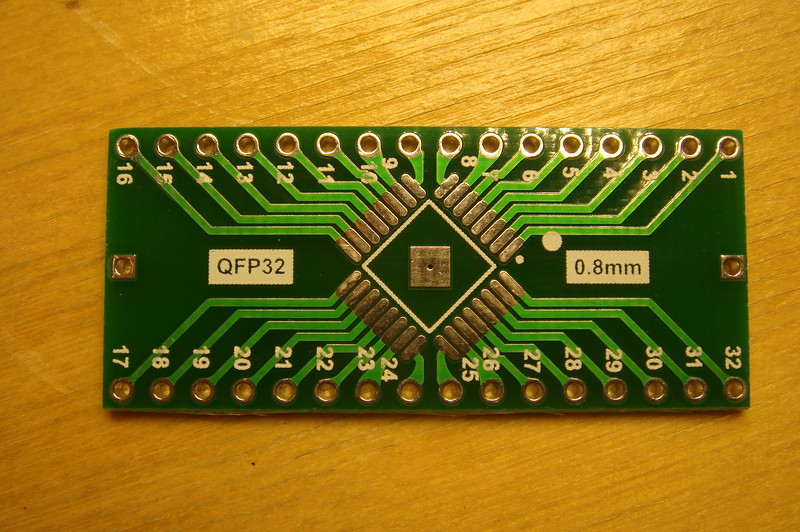
我不是很昂贵地购买了上述控制器的分散件,并有条件地制作了原型(实际上是一个从小机箱到大台阶的适配器)电路板,目的是尝试以最少(但合理)的元件数量从中制造出低成本的Arduino版本。
实验证明是成功的,并且在吞下经典的Blink之后,为Arduino环境配置的控制器非常成功地使LED闪烁。 好吧,然后,按照“完成猫头鹰”的原则,我在最终的板上增加了编码器(带按钮),三个LED和一个带有幅度调制的正常发送器,其载波频率为433.92 MHz。
为了将所有元素都放在一个小盒子中,我不得不承受一点痛苦,但是遥控器仍然有效。 尽管看起来问题已经解决了,但我还是想要更多-原始案例。

第二种方法
实际上,出现了一组同志的第一个版本(抱怨)被粉碎了,所以我无限期地推迟了它。 但是他没有指出:很可惜。
但是当3D打印机出现时,他保证自己有一天会制作相同的原始盒子,并用遥控器解决问题。
我不知道结果是好是坏-我真的不知道如何评估我的事情。 但是,在3DToday上,该团队比在MySKU上更热情(我没有抱怨-这不是我自己的礼物),他们对该案例的评价比我高。
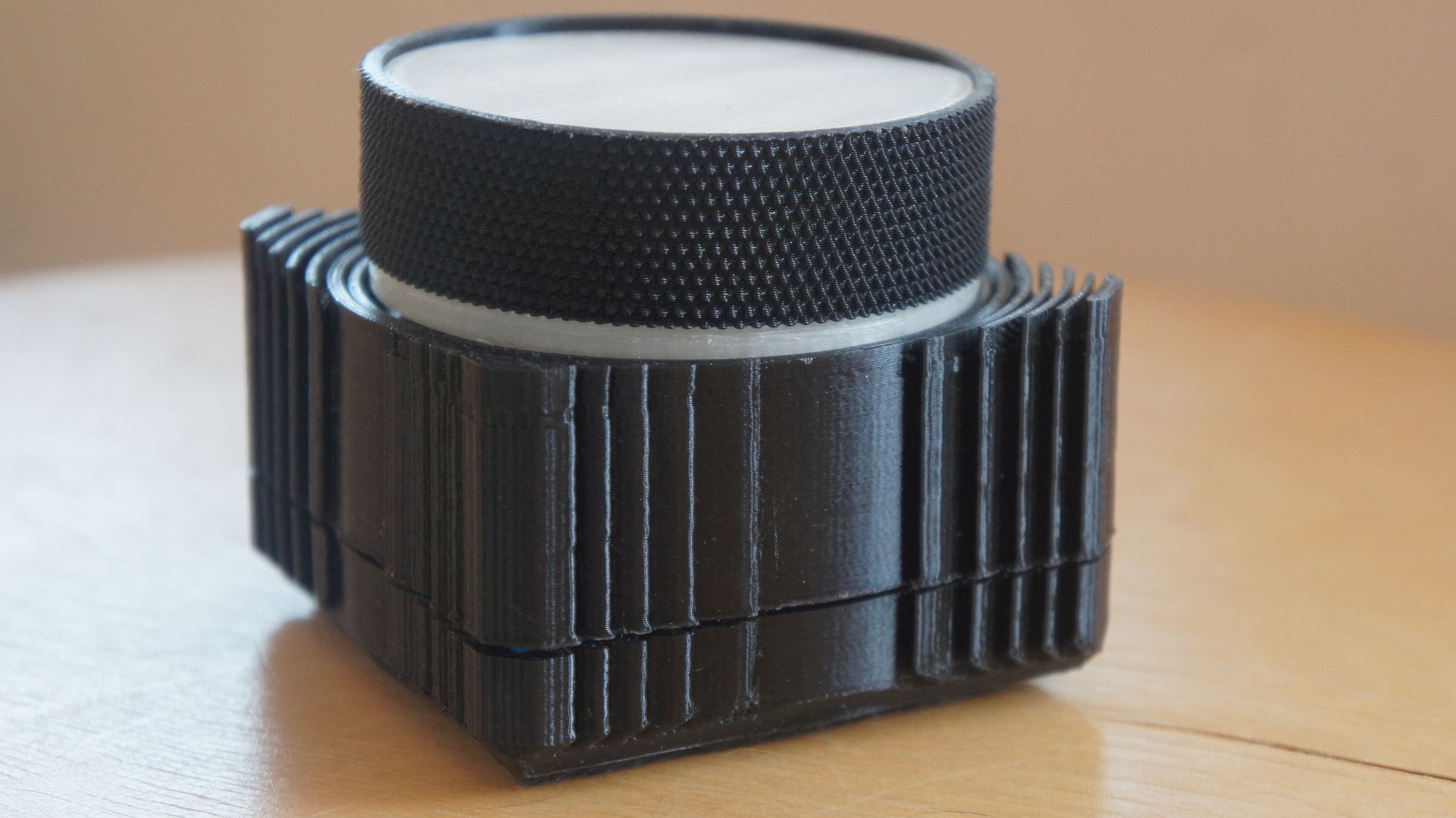
但是,由于拥有完全的行动自由,我放弃了脆弱的中国电池,取而代之的是将老式的18650用作电源,正如您可以轻易看到的那样,正是它的尺寸在很大程度上决定了整个外壳的尺寸。
我开始使机壳本身模块化,该机壳由许多部分组成,这使我只能重印单个(错误或不是非常理想的)元素,而不重印整个产品。
还有一点是,我真的不喜欢做连接器的切口,这是我做不到的。 因此,在供应链中
,刺猬伊夫琳(Evelyn)知道了另一个窍门:无线充电。
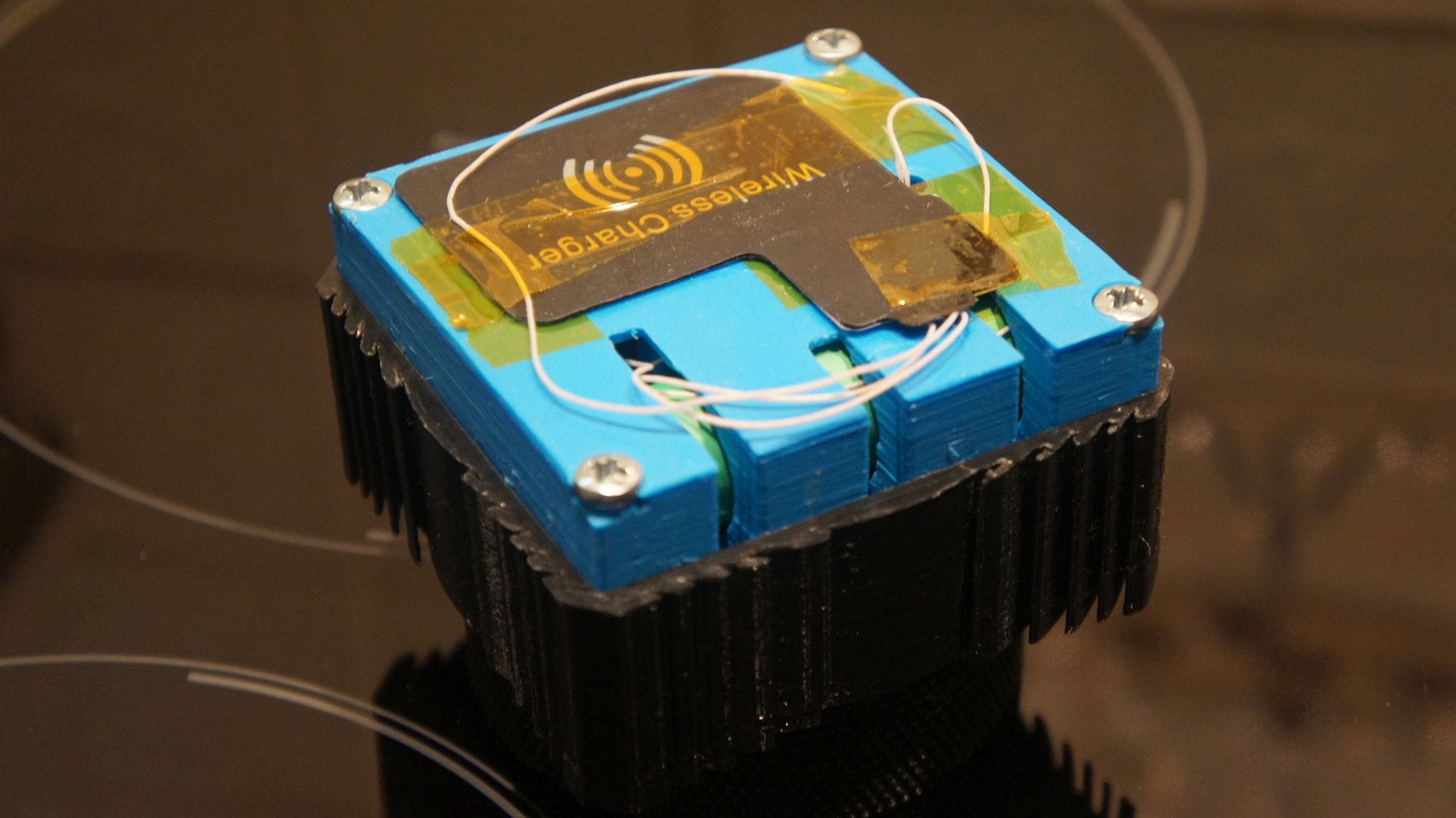
在我的zashashnik中,刚刚放置了另一个接收器,我立即将其付诸行动。
最后,最后一招很明显,但仍然如此:为了使遥控器不会在桌子上爬行,我将一块防滑汽车防滑垫粘在了底部。 最后,尽管将其重新布置到另一个地方也不是问题,但它绝对是一个整体。
重复什么
铁片
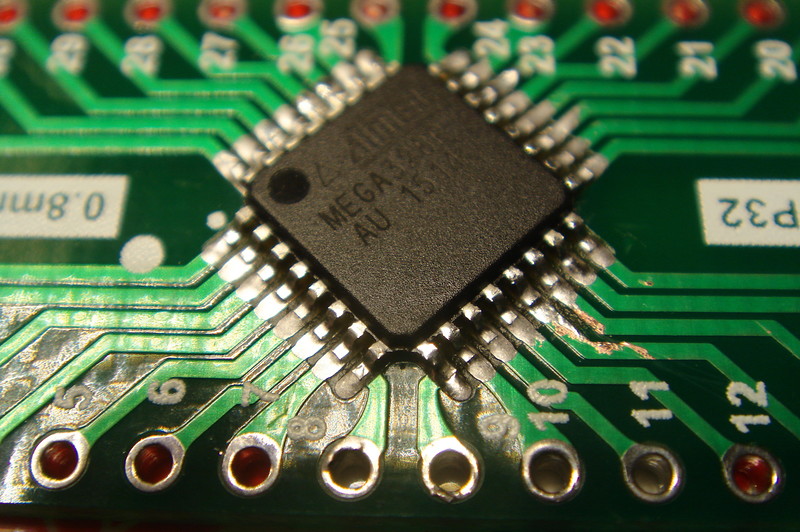
1)ATmega328P控制器-1个 (在我的TQFP软件包中,但任何人都可以)
2)10 kOhm电阻器-5个 (4个抑制编码器反弹,1个抑制控制器)
3)100欧姆电阻-3个
4)陶瓷电容器0.1微法拉-4个 (对控制器和编码器弹跳的抑制)
5)推式编码器(valcoder)-1个 (我有
PEC12-4220F-S0024 )
6)LED-3个 (直径3毫米)
7)锂电池充电板-1个 (理论上,从出现的移动电源中,任何在负载下自动开启的人都可以使用)
8)Qi无线充电接收器-1个
9)具有433 MHz幅度调制的发射机-1 pc。 (
像这样 )
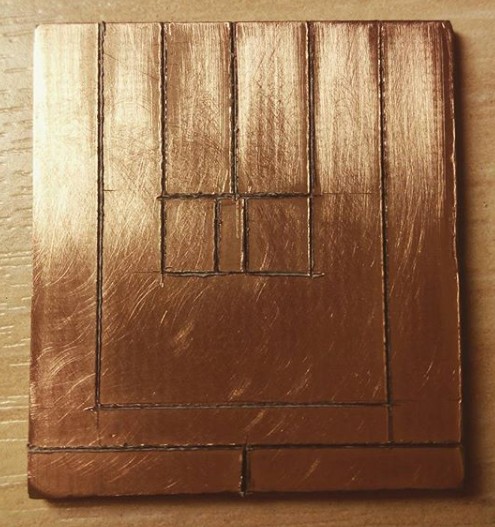
10)一些玻璃纤维编码器板
11)3D打印机
12)合适的塑料(我印有PLA)
13)M4x30螺钉-4个
通常,可以减少组件的数量。 例如,在一个非常小的版本中,该控制器根本不需要捆绑,尽管我决定听从
Nick Gammon的建议,并且没有多余的电容器和电阻器。
以同样的方式,您不必为硬件抑制接触反弹而烦恼,而可以尝试使用软件。 然后,您可以交叉另外四个电阻和一对电容器。
另外,您可以使用现成的Arduino开发板,例如Pro Mini,但是在这种情况下,我不能保证能耗低,您必须自己动手。 同时,这种情况必须纠正。
方案:
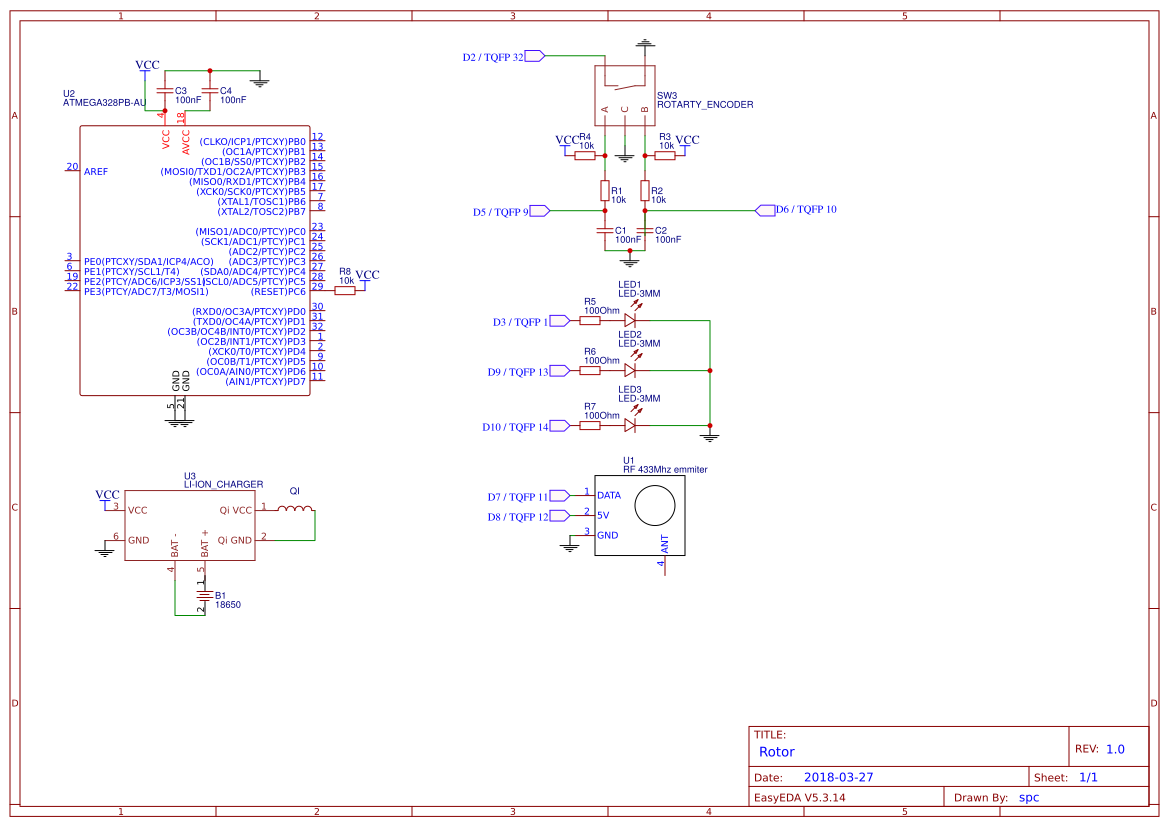
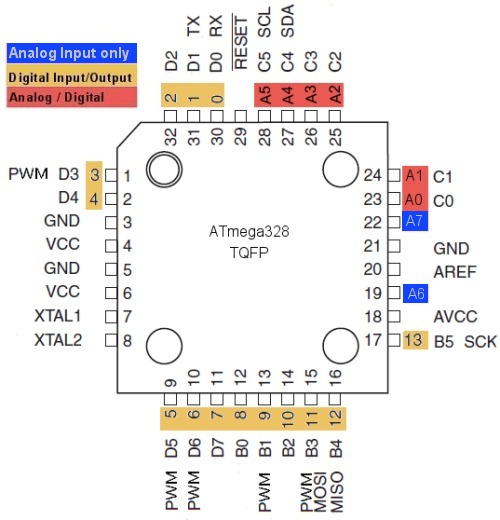
作为参考,
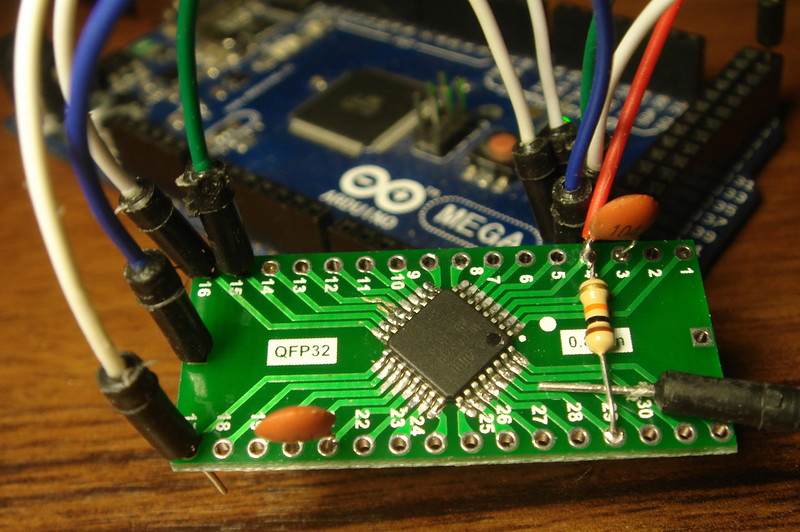
Hobby Electronics的TQFP-32封装中的ATmega328p引脚排列:
对于我的编码器,我画了一个小板:
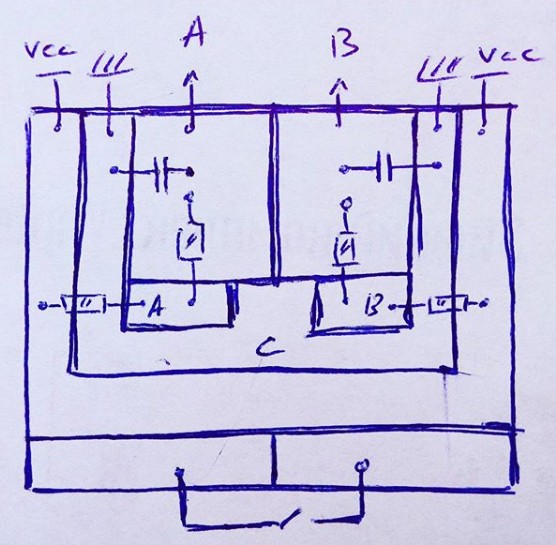
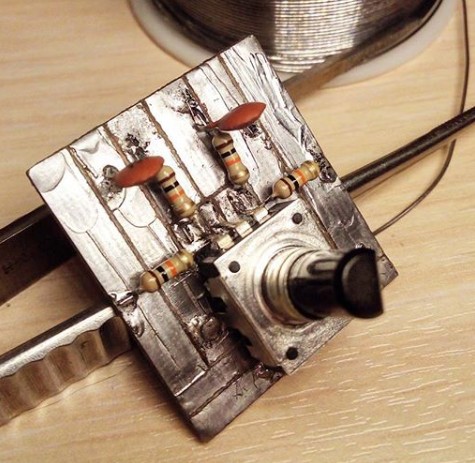
如果效果良好,则必须在安装编码器时进行钻孔,或者将其“向下”固定在板上(注意隔离,以确保没有短路),以便编码器a)或多或少均匀地安装并且b)不会摆动。 从历史上看,我有第二种选择。
在这种情况下,重要的是带有零件的板的高度(不包括编码器)不得超过(或不超过)5毫米。
如果Arduino开发板还没有准备好,那么为了使所有功能正常工作,您需要首先将Arduino引导加载程序写入ATmega328P控制器。为此,首先,将控制器描述添加到Arduino环境。 为此,请
访问Arduino官方网站并下载适合您的环境版本的描述档案(
对于1.6 ,
对于1.5 ,
对于1.0 )。
存档的内容应提取到Arduino环境文件夹的hardware文件夹中。 将来,我将描述仍在使用的1.0.3环境示例所发生的情况。
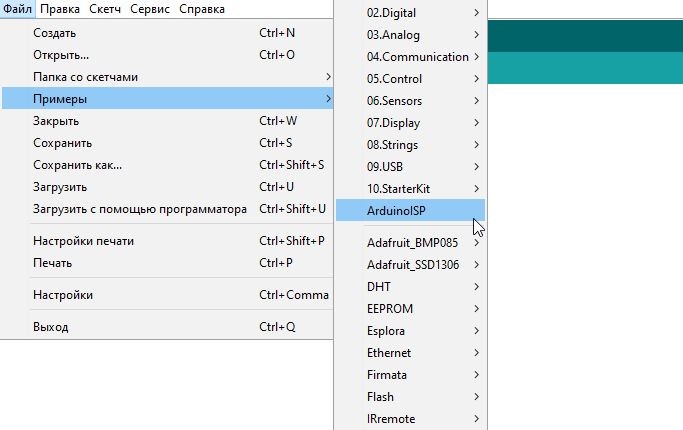
复制描述后,您应该启动Arduino并将编程器草图加载到Arduino中,它将用作该编程器本身。 草图位于文件-示例-ArduinoISP菜单中。
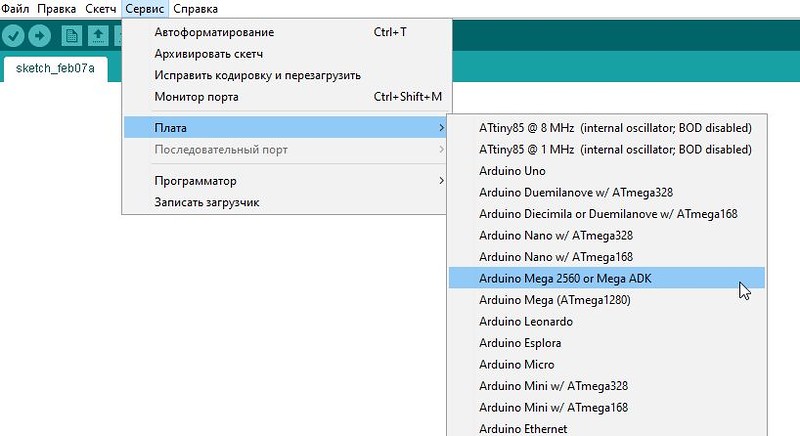
当然,您应该选择板子和端口。 我选择兆丰,因为我有:
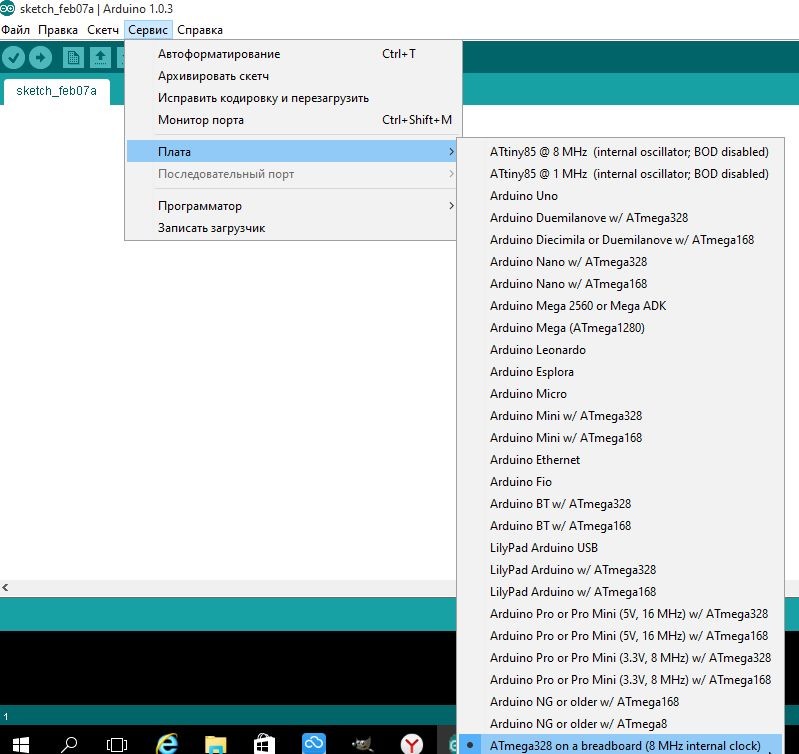
加载编程器草图后,需要切换到目标板。 即 在我们的例子中-频率为8 MHz的ATmega328和一个内部主振荡器。 如果正确复制了上述描述,它将在主板列表中:
现在,您需要将编程器板的MISO,MOSI和SCK线以及将来的Arduino与板连接,还需要连接RESET,GND和VCC。 最后,电源是最好的。
根据上面的信息图和Arduino Mega的描述,出现了以下图片:
SPI-Arduino Mega-ATmega328p
MISO-50-16
MOSI-51-15
SCK-52-17
SS(重置)-53-29
根据您的口味进行物理连接,我使用了一种专门的野蛮方法-将普通面包板电线直接插入板孔中,而无需焊接和绝缘:
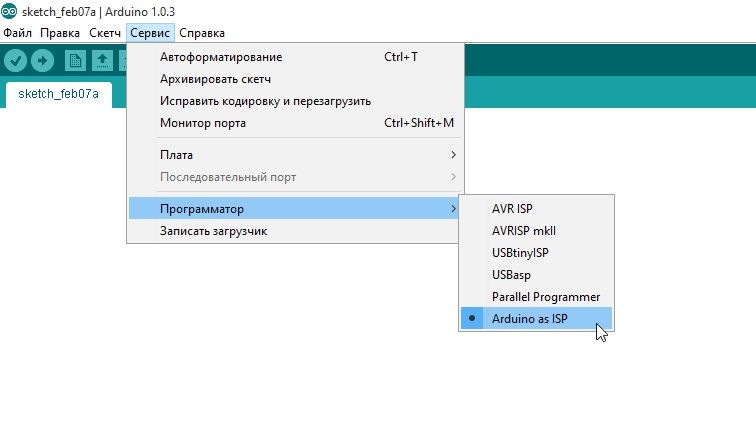
如果一切准备就绪,请记下引导加载程序。 首先,请确保选择了正确的程序员(服务-程序员-Arduino作为ISP):
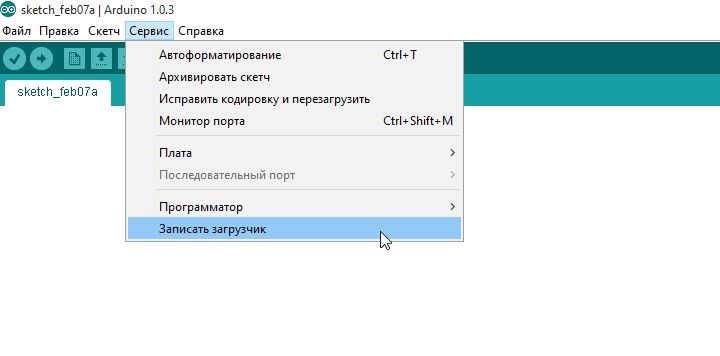
然后我们执行Service-Record bootloader:
之后,输出是一个极简的Arduino板,可以将USB-Serial适配器或带有该适配器的完整Arduino板加载到其中,以加载草图。 在第一种情况下,您需要交叉连接RX和TX,并且不要忘记连接公共地线。 在第二种情况下,还必须将用作适配器的RESET Arduino接地。
如果像我一样,如果您没有在下载草图之前自动重置控制器的电路,则有两种选择:要么拉其重置,要么在Arduino环境表明下载已开始时简单地打开其电源。
房屋
正如我所说,这种情况是模块化的。 这意味着,在眼睛看不到的内部,可以放入陈旧且不再合适的塑料。 您可以在上面放置电子产品:
我提请注意以下事实:该案例是特定的,旨在适合我的填充版本。
我建议使转子透明,以使其散射指示器的光线。 为了增加重量,可以在转子内部插入一个M16螺母:

仍然需要一件运动衫和一件外衣。 盖子可以简单地向内插入,并保持摩擦。 而且,当然,离不开外壳的上部和下部。
我打印了填充为10%的转子,其余元素填充为5%。 塑料-PLA。 在我的打印机上,喷嘴的设置温度在前三层中为200℃,在下一层中为185℃。 不幸的是,我不能说喷嘴的真实温度是多少。 桌子很冷。
组装很简单。
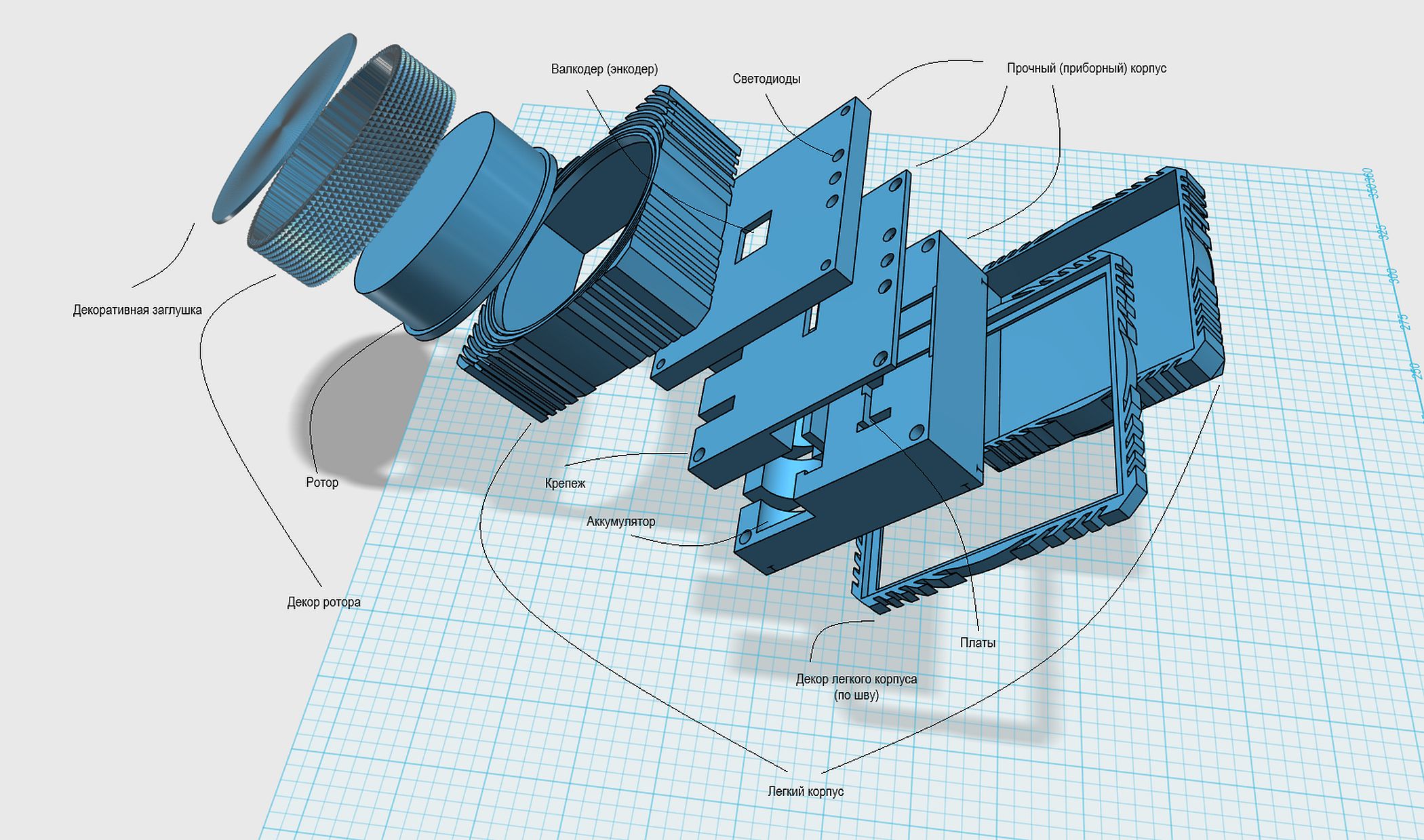
板放置在耐用箱的凹槽中,LED放置在耐用箱下部的凹槽中。 发射器的天线放倒,无线充电接收器以相同的方式放倒-使其更接近相同的电荷。
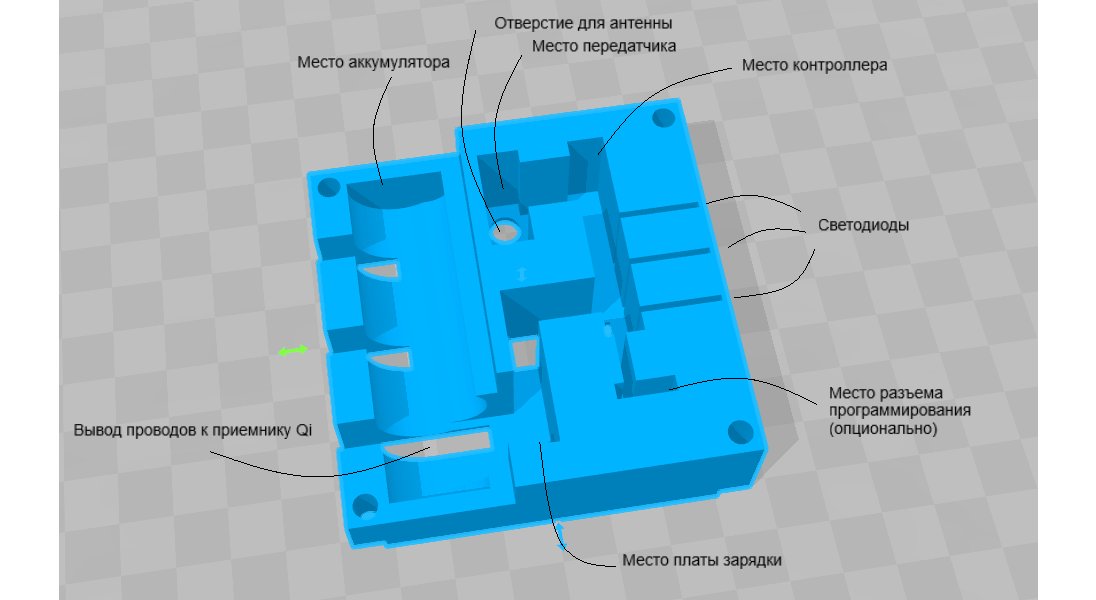
填充物由中间板固定,中间板的槽中穿过编码器线束。
编码器固定在上板上,并全部用M4x30螺钉拧紧,螺钉本身用塑料切割。
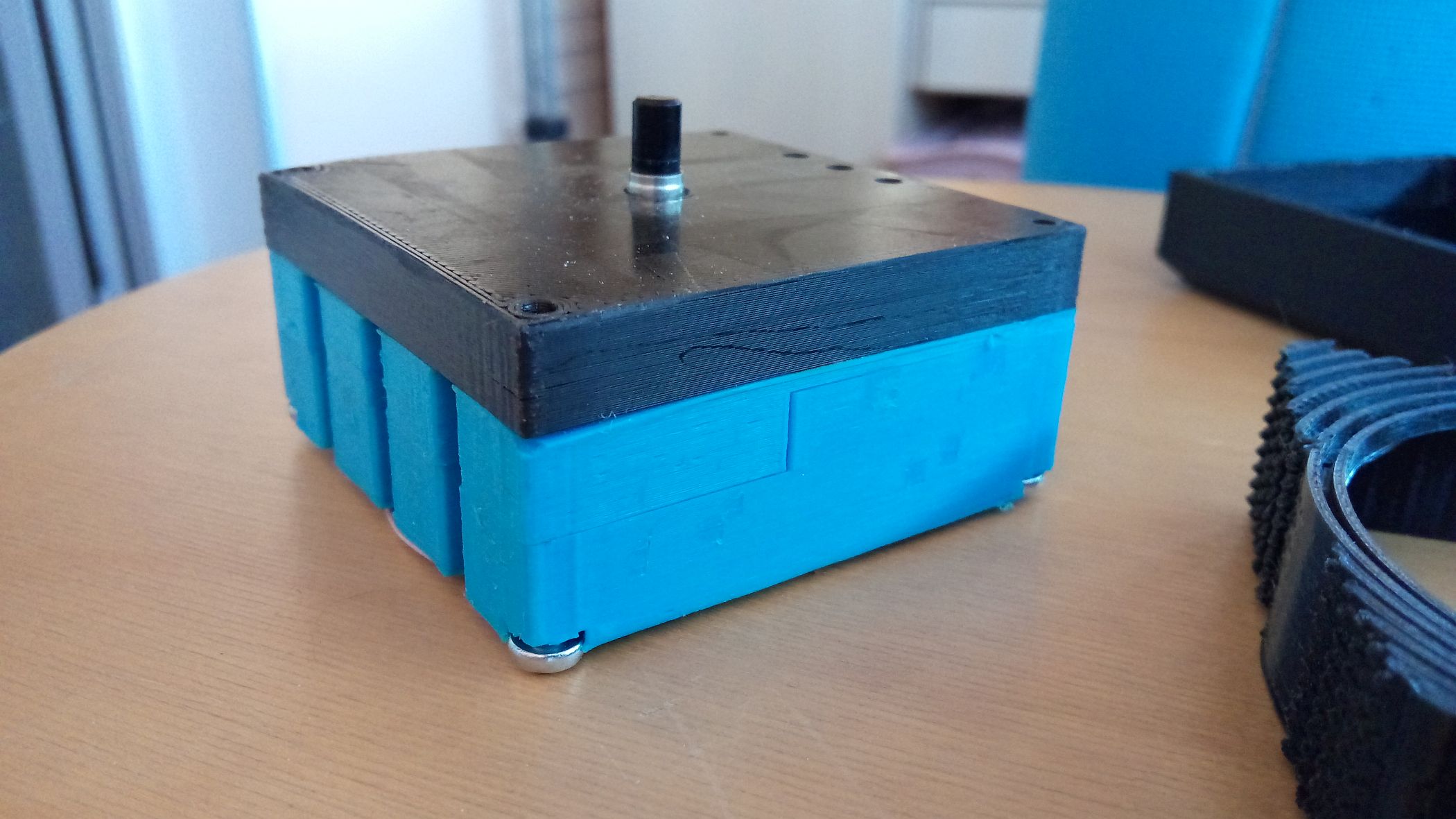
现在,可以将耐用的外壳封装在外壳的两半中。 转子放在编码器轴上,衬衫在转子上。 可选地,将防滑垫粘在车身底部。 另一种选择是装饰性插入物,将接缝隐藏在身体的两半之间。
代号在代码中,您需要指定命令来打开和关闭外围设备。 可选-更改自动关机超时时间。
这些都位于变量部分。
案例模型
参考 。
仅此而已。
PS:我尽力不忘记任何事情,但我可以。 如果是这样,我深表歉意,并将尽我所能正确回答主要问题并纠正错误。