BigDog是第一个广为人知的波士顿动力机器人。 在许多方面,正是他“创造了公司创造者的名字”。 被军方抛弃的军用机器人,以及第一个开发人员将相机踢向波士顿动力学的机器人。
现在该项目已结束,但已成为该公司后续发展的基础-猎豹和新Spot, 随着视频迅速传播。
今天,我们将尝试用其开发人员的话来了解BigDog设备。 作者于2008年发表了原始文章,但仍然(某种程度上)尚未翻译成俄文。 它讲述了机器人的主要组成部分以及协调步态的算法。 BigDog项目的目标是创建具有腿部并能够在崎terrain地形上移动的独立设备。 它们必须优于现有的轮式和履带车辆。 理想的系统应该走在人或动物可以去的任何地方,运行数小时并以其自身的燃料和有效载荷的形式承载重量。 她足够聪明,能够以最少的人工干预和控制来穿越地形。
尽管仍有大量工作要做,但由BigDog创造的机器人帮助采取了多个步骤来实现这些目标。
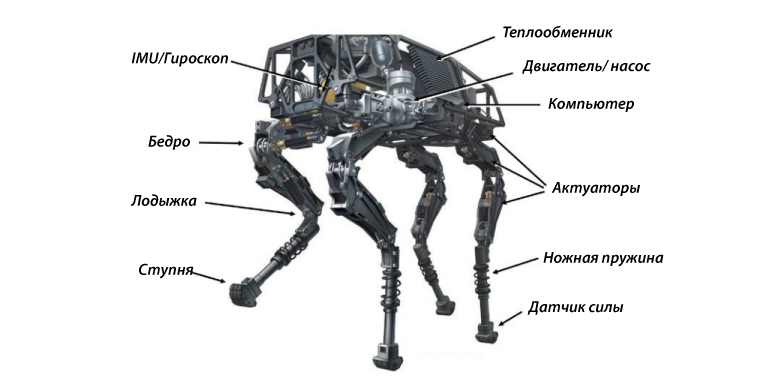
BigDog具有车载系统,可提供电源,电源,环境数据收集,监视和通信。 由水冷式二冲程ICE供电,功率约15 hp。 它驱动泵,该泵通过过滤器,歧管,电池系统将液压油输送到机械手的执行器。 执行器是由两级伺服阀控制的低摩擦液压缸。 每个执行器都有监视关节位置和强度的传感器。 每条支腿都有4个液压执行器,为关节供油。 安装在BigDog主体上的热交换器可冷却机油,而散热器可冷却发动机,以实现稳定运行。
 BigDog的关键设计元素
BigDog的关键设计元素车载计算机控制BigDog的行为,控制传感器并负责与远程操作员进行通信。 它还记录了大量的工程数据,以进行性能分析,错误分析和操作支持。
BigDog有大约50个传感器。 惯性传感器测量身体的位置和加速度,关节传感器测量关节致动器的运动和强度。 车载计算机处理来自所有这些传感器的信息,以估计机器人的运动方式。 另一组传感器控制BigDog的动态平衡:液压,流量和温度,发动机转速等。
车载计算机同时执行低级和高级监视功能。 低级系统控制伺服器的位置和关节中的营养。 高级别协调腿的位置,以在运动过程中调节身体的速度,位置和高度。 它还跟踪与地面互动的力量,以确保稳定运动。
BigDog有许多运动选项。 他可以站起来,蹲下,步履蹒跚地走路,走路,一次只抬起一只脚,小跑和疾驰。 爬行步态的速度为0.2 m / s,山猫为1.6 m / s,跑步为2 m / s(在实验室条件下,最大速度指示器为3.1 m / s)。 此外,机器人可以跳跃1.1米。
BigDog通常由操作员控制,该操作员与通过IP无线电连接到机器人的控制单元一起工作。 操作员提供运动和速度的高级控制。 他还可以命令机器人启动或停止发动机,站起来,坐下,行走或继续行驶。
[关于如何开发机器人的自主导航算法,您可以在此处阅读]立体视觉系统和激光雷达已集成到机器人中。 喷气推进实验室开发的立体视觉系统由一对立体相机,一台计算机和视觉软件组成。 它用于在机器人前面获取3D形状的景观并找到其路径。 需要激光雷达,以便BigDog可以跟随一个人而无需其他操作员命令。
步态控制
为了以人类的速度运动,BigDog使用了动态平衡的小跑步态。 它可以通过侧向速度和加速度来平衡,该速度由腿部的感知行为与惯性传感器共同确定。
BigDog控制系统响应基本姿势命令,协调机器人的运动学和地面反应。 控制器在支腿之间分配负载,以优化支腿的承载能力。 肢体的垂直载荷应尽可能保持均匀,并且单个腿部会产生针对臀部的地面反应,以减少摩擦。
负责肢体之间通信的步态协调算法触发腿部运动。 它由虚拟腿模型协调。 通用的BigDog步行控制方案可以表示如下:
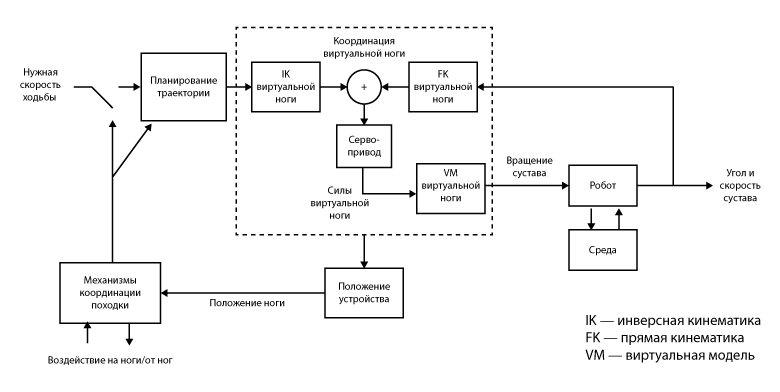 大狗行走控制模式
大狗行走控制模式我们开发了用于崎terrain地形的行走算法,并在进行机械手测试之前在物理模型中对其进行了测试。 模拟机器人以最大60度的角度沿着斜坡行走。 它的运动算法取决于它是在平坦表面还是在斜坡上变化。 此外,它还考虑了途中的意外障碍,例如石头或坑洞。
物理建模被用来开发步态算法。控制系统使用来自关节传感器的信息来确定“腿”当前是否在地面上,并确定每个肢体和驱动器上的负荷。 状态算法控制身体的位置,使肢体的运动学与腿部接触地面的反作用力相协调。 状态算法实现了腿在不平坦表面上的正确运动。 这样,您就可以控制身体相对于地面的转弯,步距和高度,从而使BigDog能够适应景观变化,而无需对地形有更高感知的传感器。
BigDog通过两种方式适应地形。 它可以调节身体对地面的高度和姿态,并控制脚的放置位置。 当从斜坡上升和下降时,机器人的身体会倾斜。 机器人通过纠正步态并使用较小的步幅克服了陡峭的坡度(大于45度)。
在文章的最后,作者感谢BigDog团队的所有23个人,并分享了他们的未来计划:加强机器人的身体,使BigDog自治并使其安静(汽油发动机像摩托车一样发出噪音)。 时间表明,最后一点仍然是一个严重的问题。在robo-hunter.com上有关机器人技术的更多信息: