如今,机器人界绝对是成功的。 乐高,arduino,划痕等可供现代儿童使用(我相信很多人都和我一样,嫉妒这个孩子在这方面)。 作为机器人技术的老师,我决定分享一些我在几年的工作中积累的资料,即一个相当简单的机器人以及与之相关的一些活动。
我在教室中使用这些单元是为了向孩子们解释引擎驱动器,线传感器和测距仪的操作原理。 被这个机器人的研究所超越的孩子通常已经一年没有学过,并且对Arduino,电机和电气工程的总体知识很少。 互联网上有许多包含这些组件的项目,但是有两点促使我开发机器-我想使用一个可容纳4节AA电池的隔间,并且能够将几乎任何传感器牢固地连接到机器人上(设计中有几个额外的安装孔)。

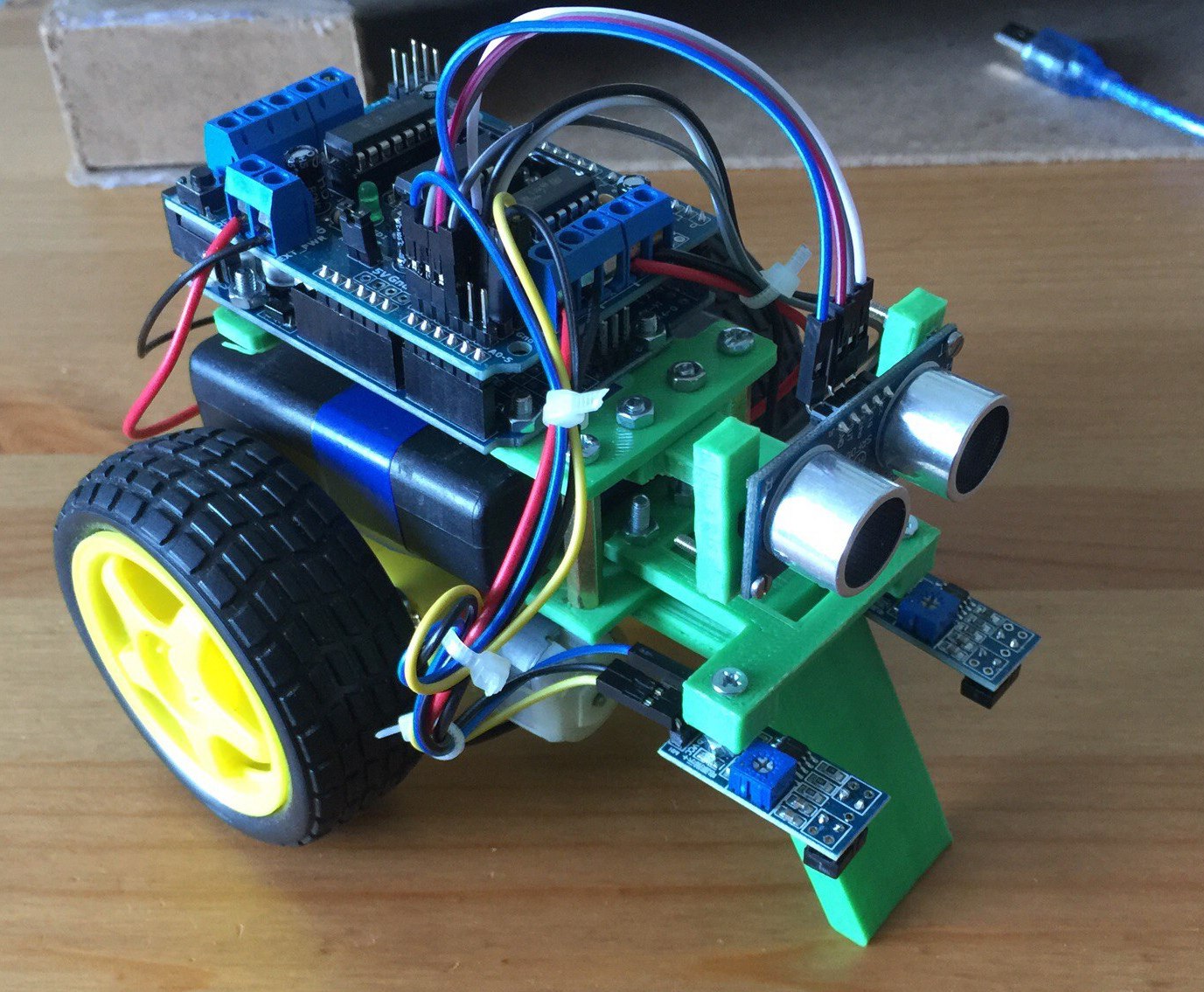
机器人由带有电机屏蔽罩l293d的Arduino Uno板控制,该传感器由我安装的HC-SR04测距仪和两个tcrt5000线传感器(具有数字和模拟输出)组成。
机器人主体由3部分组成(不包括传感器的可选安装件),这些部分在3D打印机上打印。 对于组装,您将需要M3紧固件,我在包含3D打印机文件的文档中描述了所有必要的元素。
机器人是在标准Arduino IDE环境(年龄较大的孩子)和miniBloq程序(对于年轻的群体)中进行编程的。 对于标准环境,使用AFMotor库,这对于使用引擎驱动程序的屏蔽是必需的。 在miniBloq中,要工作,需要使用本节中的相同驱动程序选择“ ta-bot v1”机器人设备。
该机器人配备了测距仪和线传感器,适合参加许多学科的比赛,但是它只是为训练而设计的,它无法赢得奖品。
可以和他一起上的课:
- 使用引擎驱动程序。 车轮以不同的方向和速度旋转。
- 简单的操作。 围成一个圈,骑八字形图(通常,在这些课程中,您必须多次选择必要的时间和速度才能获得给定的图形)。
- 线传感器。 工作原理。 传感器读数传输到计算机(端口监视器)。
- 与一个线传感器一起排成一行。
- 骑行与两个线传感器。
- 测距仪。 测距仪的原理。 将测距仪传输到计算机。
- 用测距仪在房间里骑。 机器人前进撞到障碍物后,就会一路驶向墙壁。
- 搜索敌人(如robosumo)。 两个机器人围成一圈,开始旋转,用测距仪寻找敌人。
在包含详细信息的文件夹中 ,您还可以从上面的列表中找到几个完成的课程。