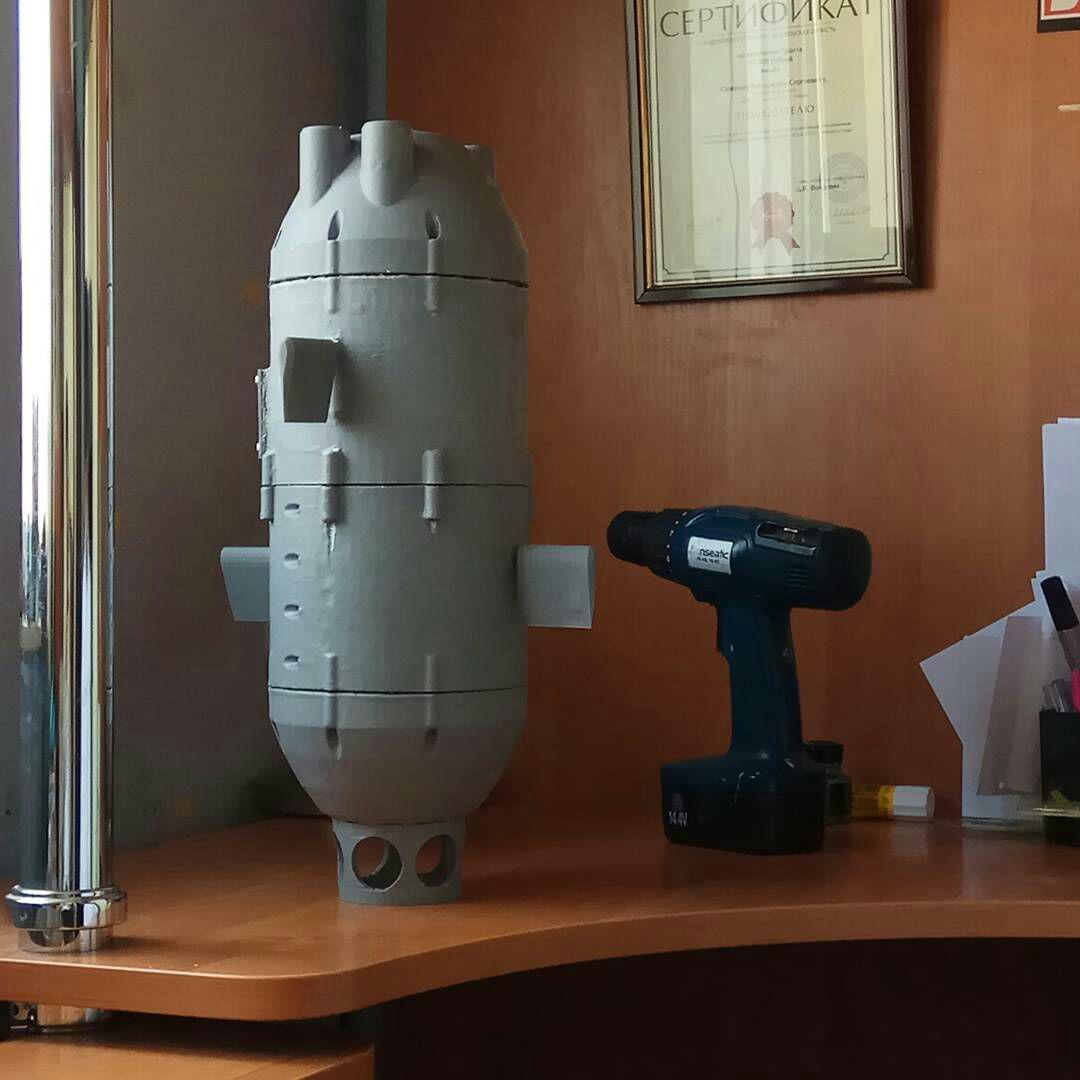
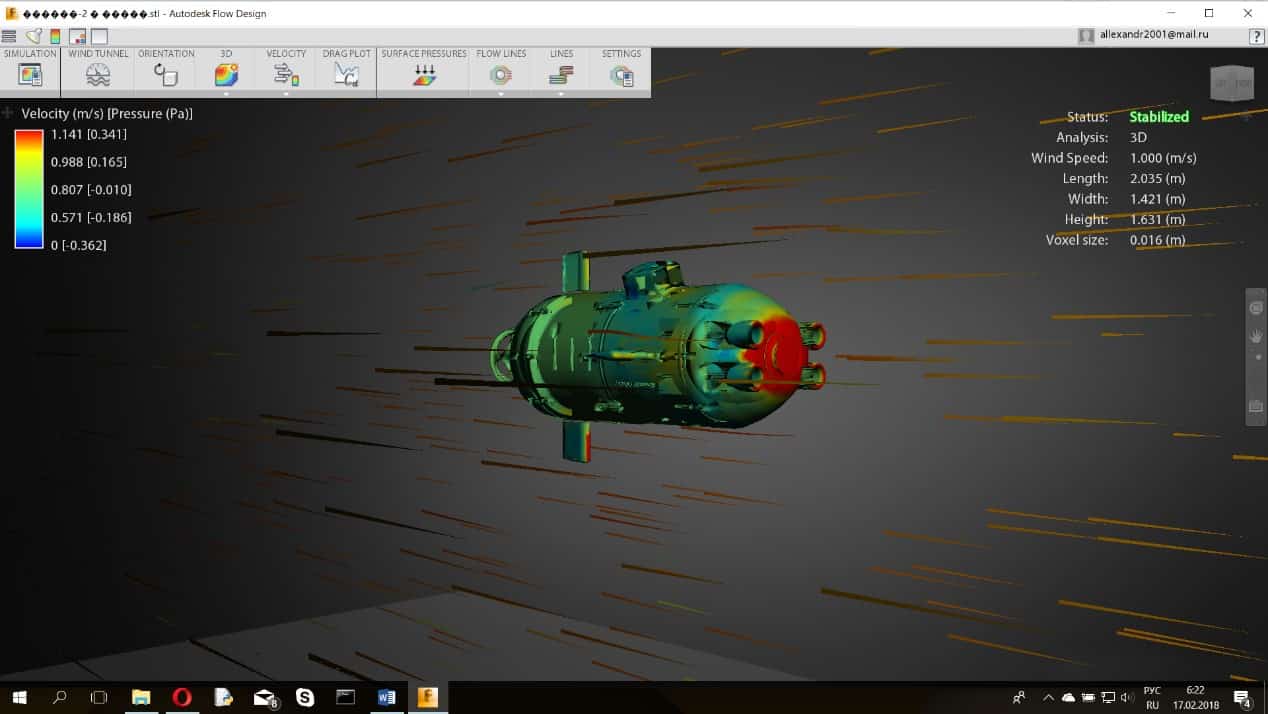
大家好,我曾经看到不出售具有远距离,功能差强人意且比全新iphone少的潜艇,因此决定自己制造。
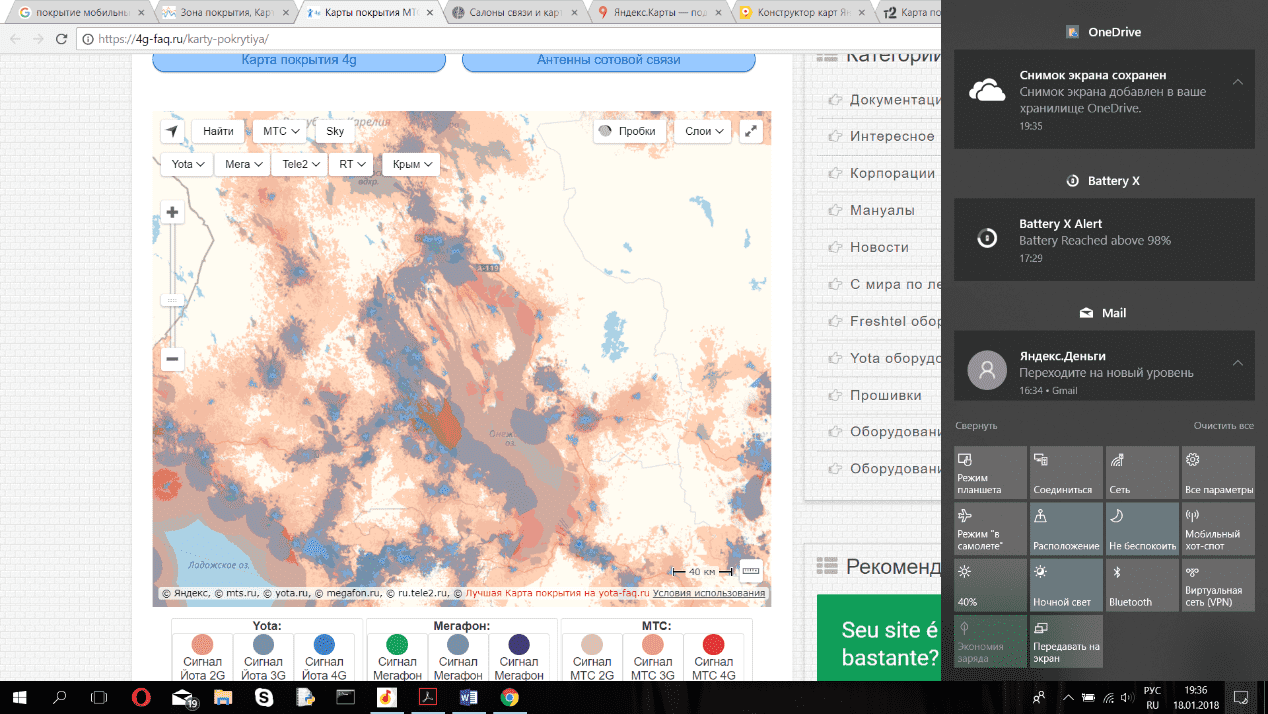
它通过Internet进行控制,现在移动Internet覆盖了俄罗斯的大部分地区。 小池塘完全被它覆盖,从大型互联网的海岸到海岸甚至几十公里。
此外,埃隆·马斯克(Elon Musk)宣布创建全球互联网。
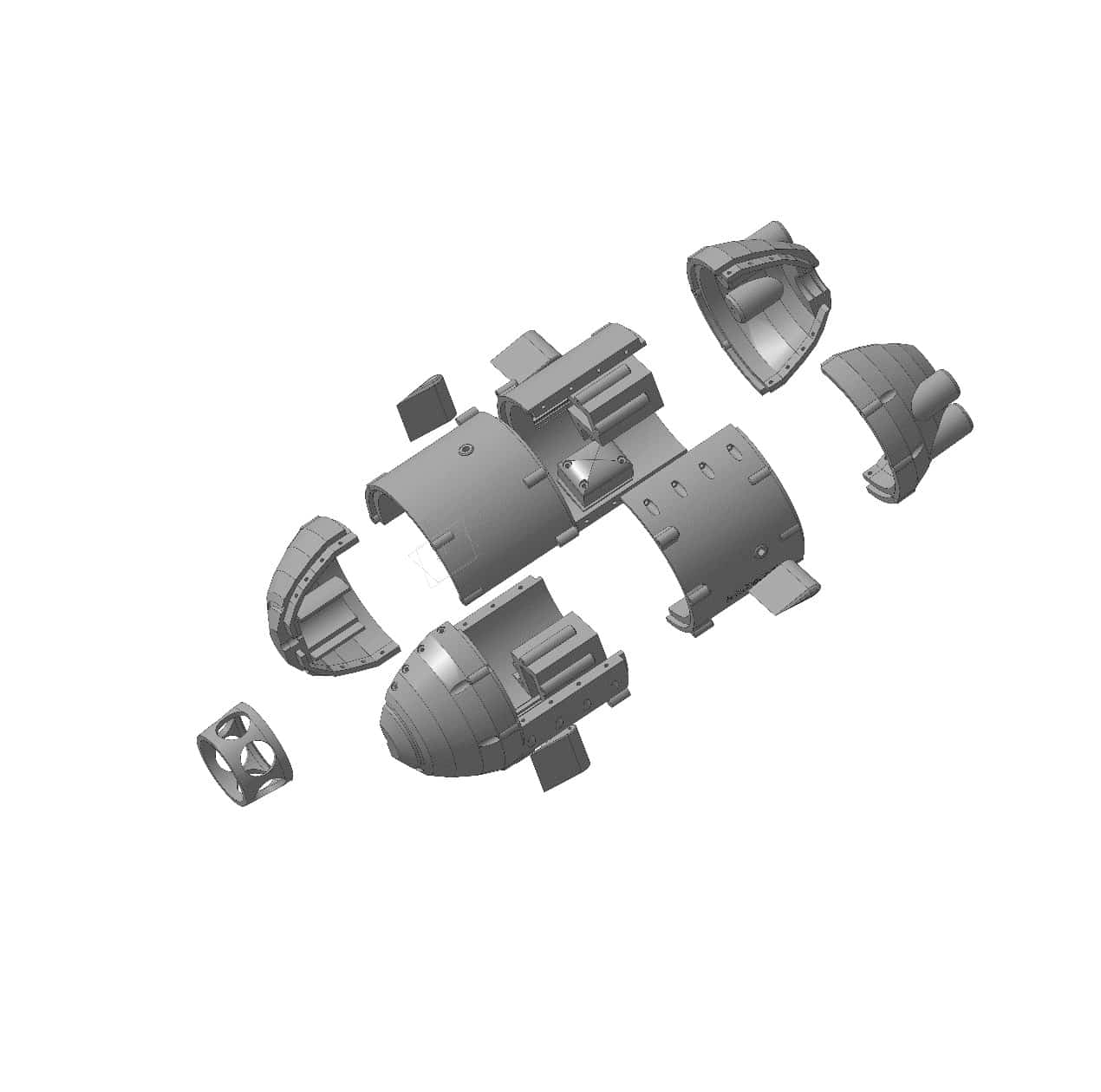
我决定在3D打印机上打印船只,这些模型是在guide_3d中制作的。 该代码是用python 3编写的。
链接到github 。
设备和材料
•3D打印机
•Raspberry pi单板计算机
•4g调制解调器(2个)
•笔记本电脑(2件1st-变送器,2nd-服务器)
•伺服电机
•网络摄像头
•引擎
•铅电池
•其他(继电器,烙铁,传感器,胶粘剂,油漆,密封胶...)。
详细资料
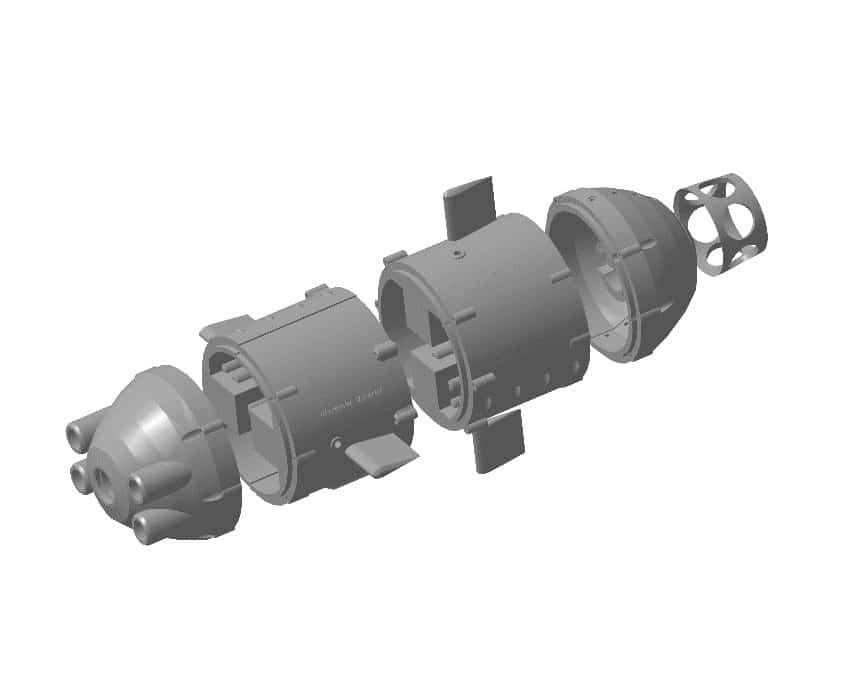
如前所述,细节在带有0.3毫米层,0.4毫米喷嘴的3D打印机上打印
在带有bf2胶基材以提高附着力的铝桌上,最长的细节打印了大约14小时。 底部装配图。
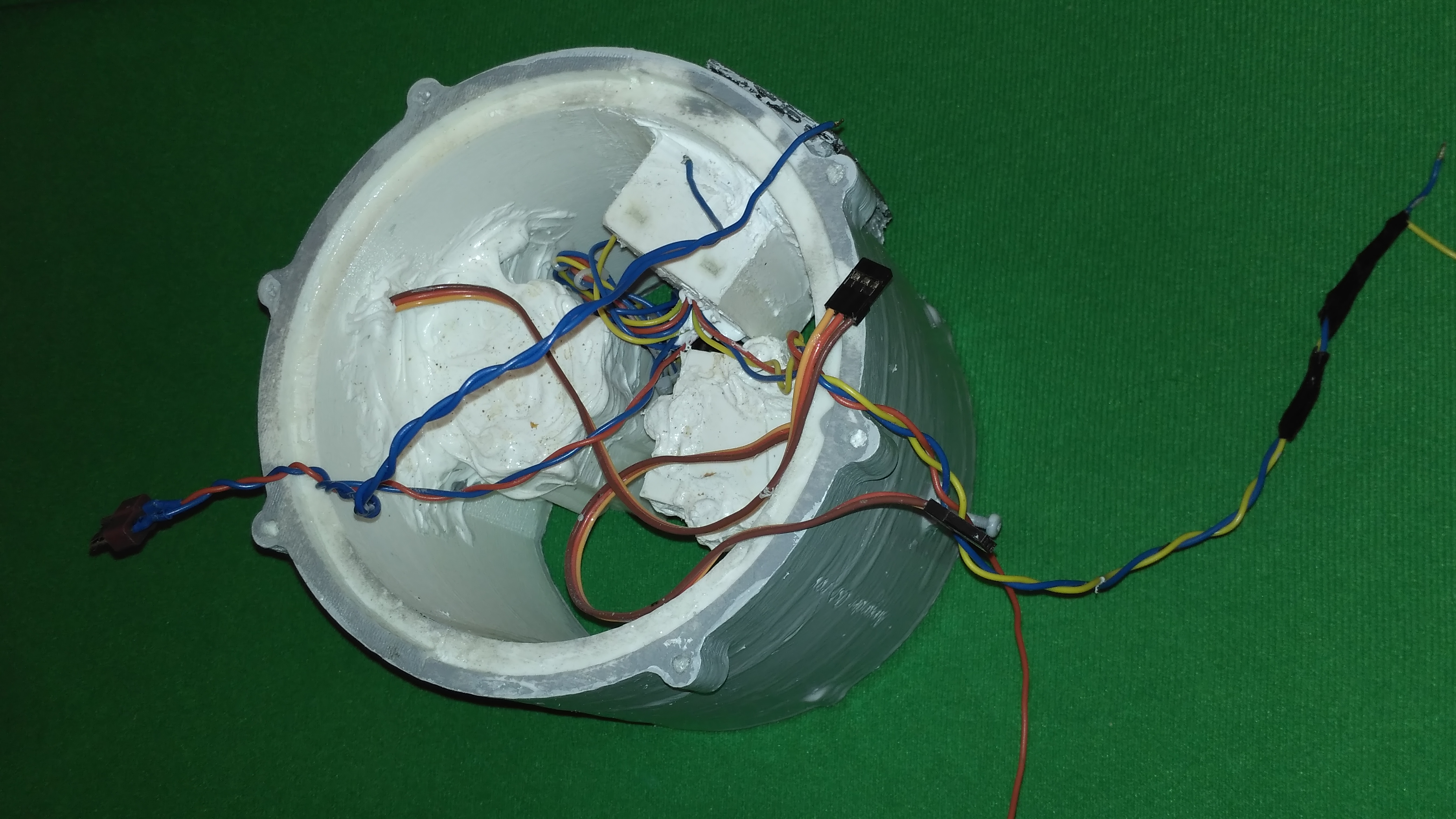
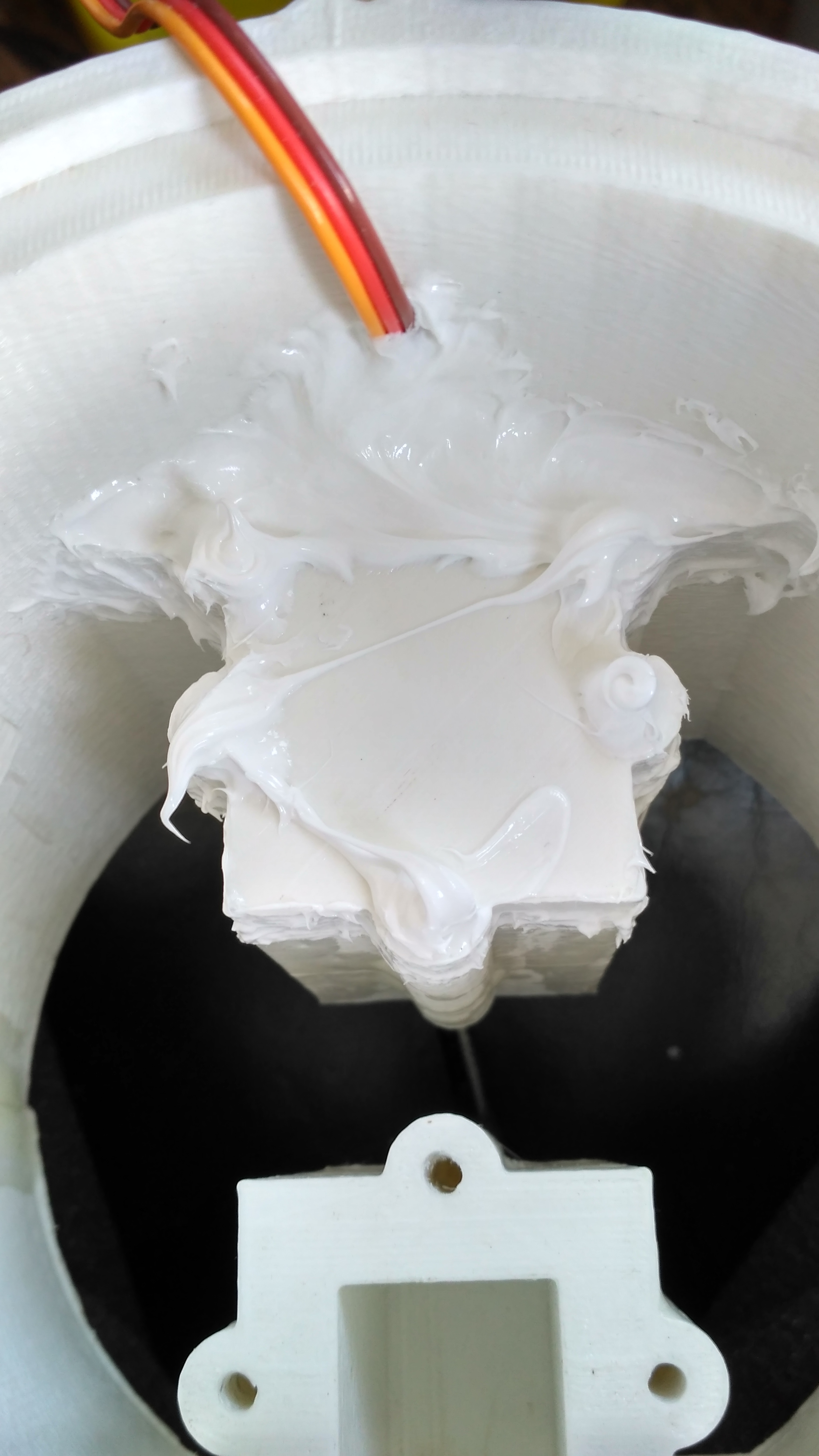
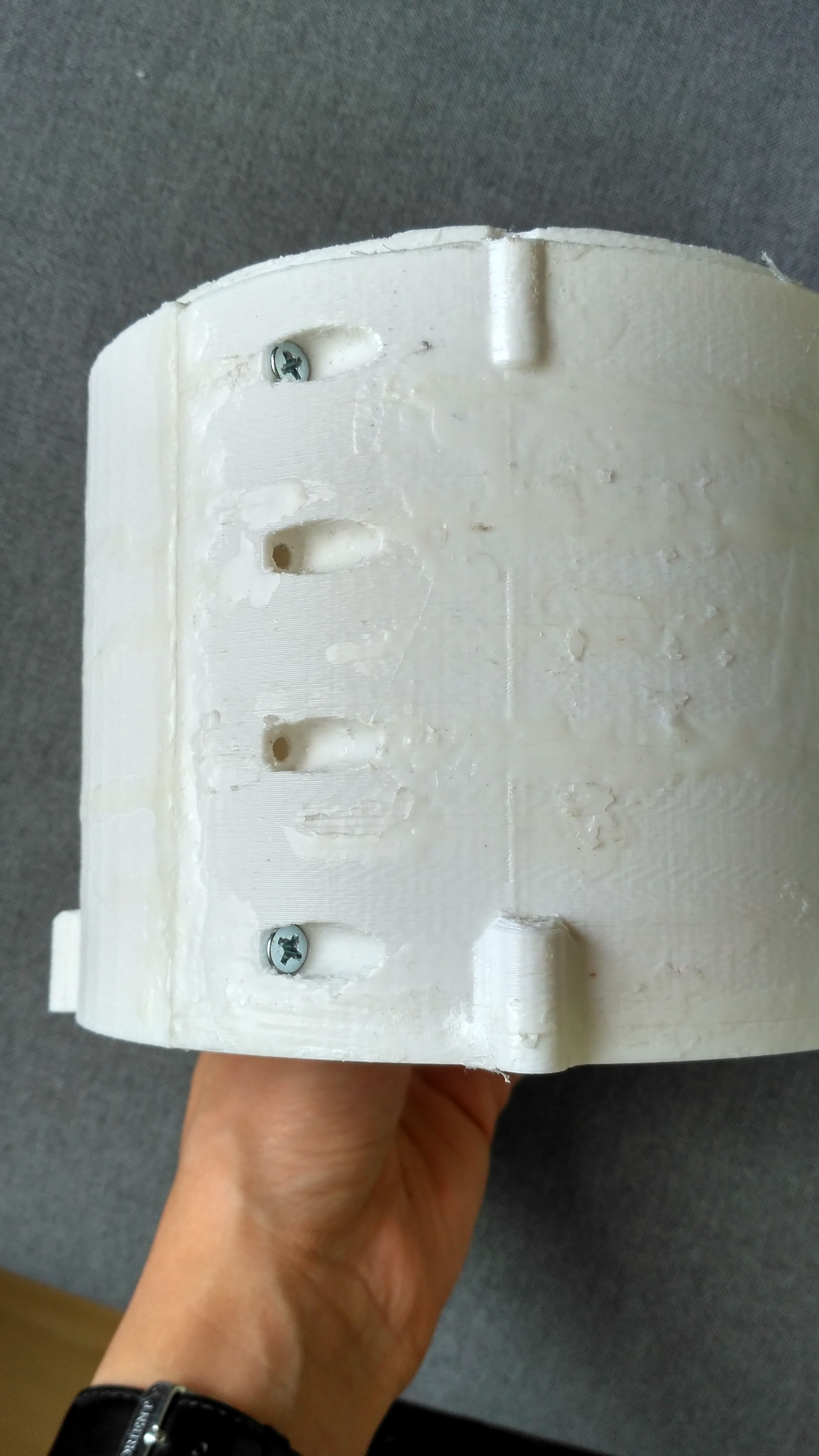
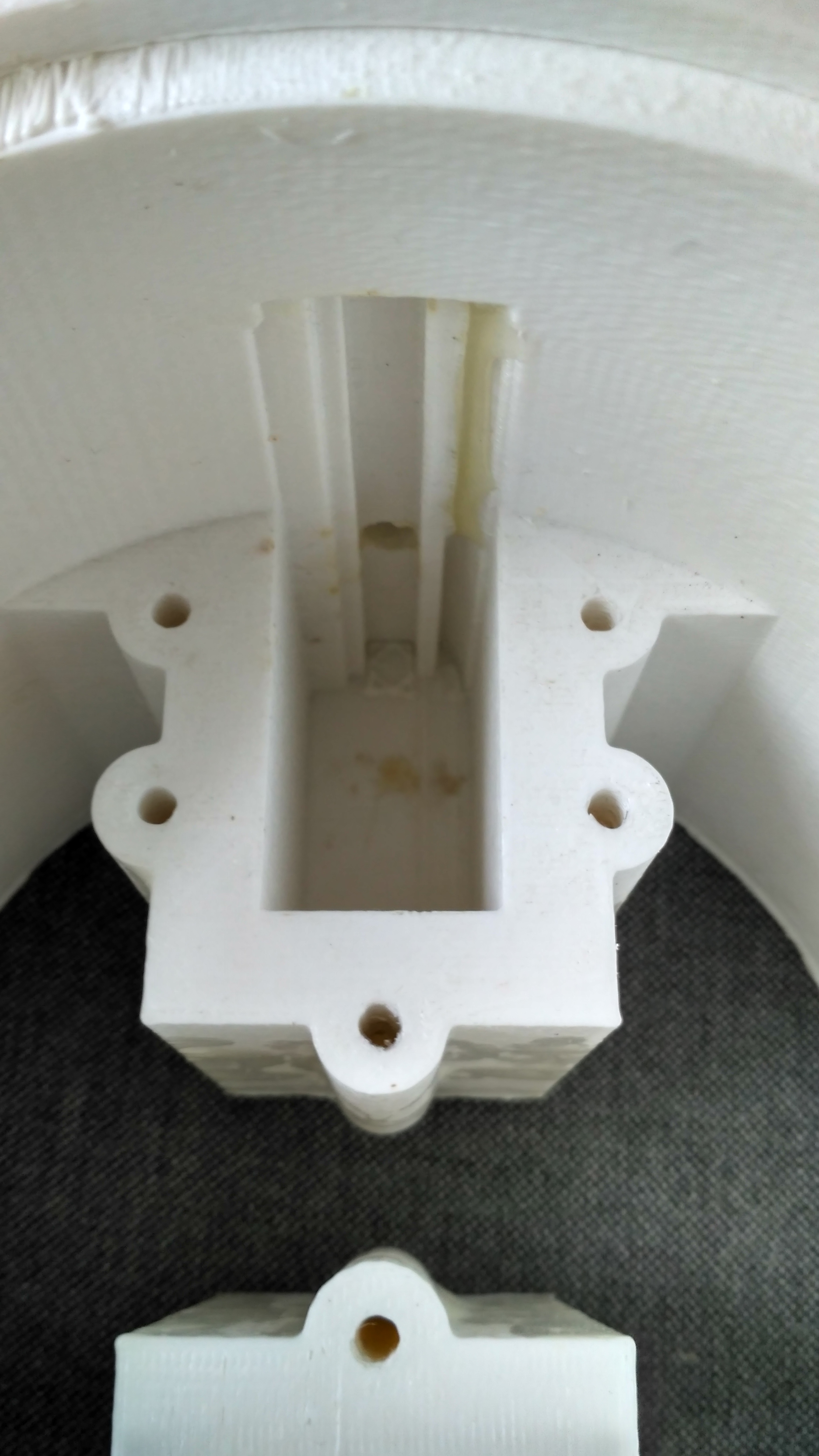
密封性
为了密封,伺服电机和前导BC电机用硅酮密封胶和油脂密封。 由于船体零件的尺寸以及吸收塑料的收缩趋势(打印后重新调整尺寸),船体本身在某些地方用pvc胶开裂,在某些地方用螺栓连接的硅酮密封剂用于水族箱。
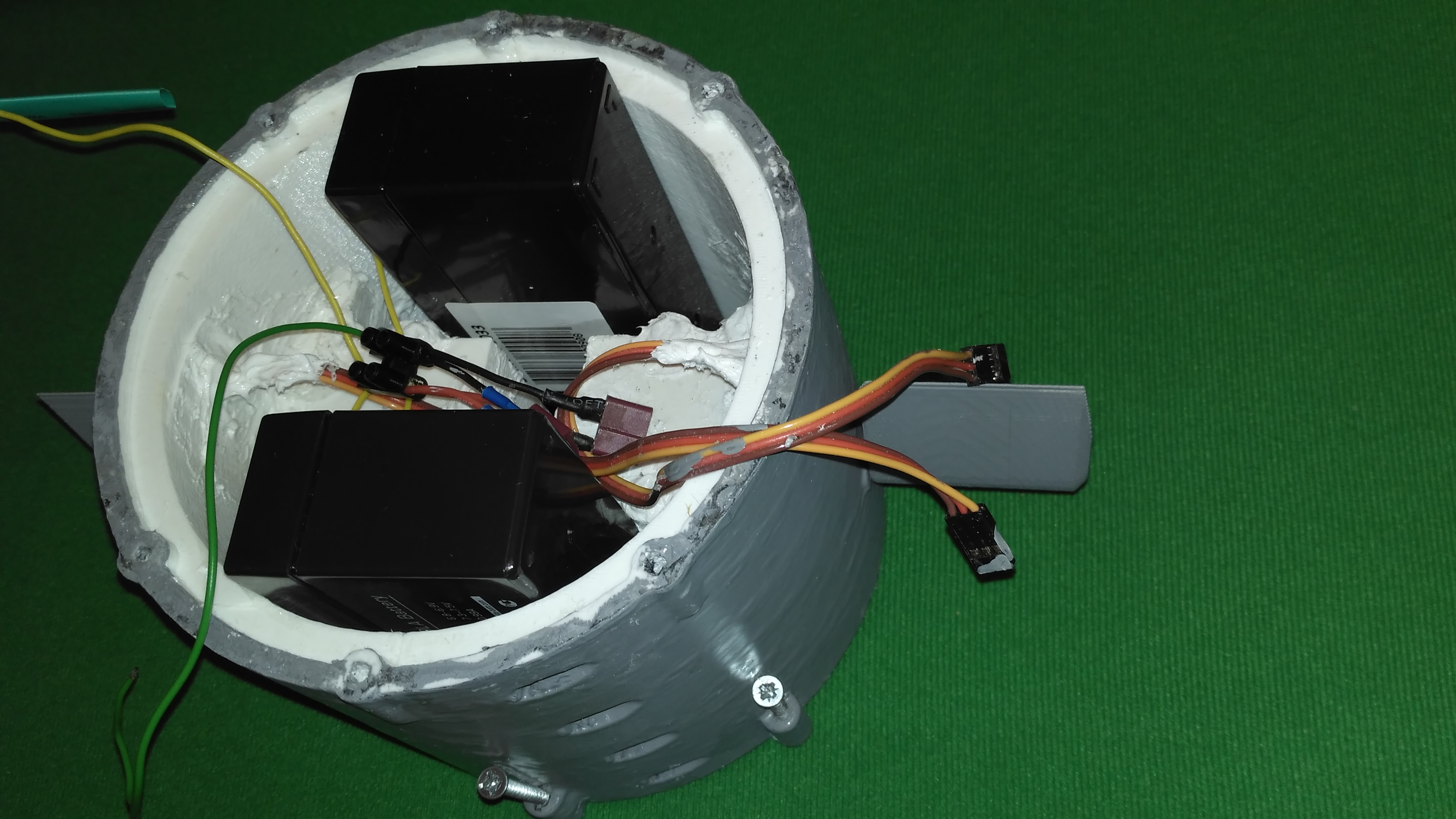
营养学
作为一种电源-两节串联的6v铅蓄电池能够提供3.3 AmH的功率,因此使用铅蓄电池,因为它们价格便宜,必须在船外引出较少的充电触点,而且它们也很笨重(船太笨重,平均密度应约为1000 kg / m ** 3)。
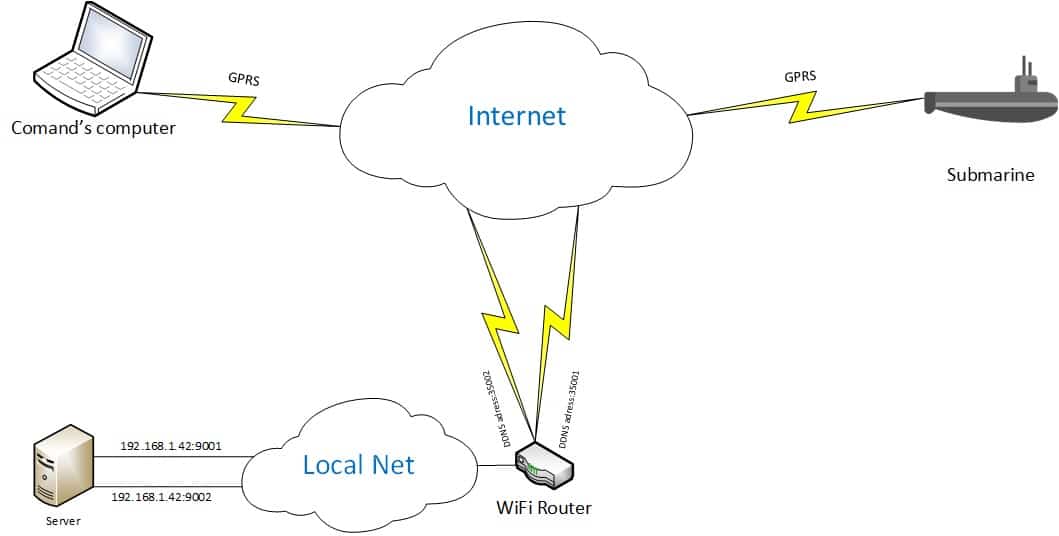
资料传输
现在介绍主要内容,即数据传输。
由于水吸收了EMV,因此必须将调制解调器带到顶部,以便船在漂浮状态下运行。
在本地的本地网络中,安装了一个服务器,它将到达它的所有内容从一个地址传输到另一个地址。 此刻,船上传输视频,笔记本电脑命令控制。 这些都是通过套接字组织的。
正如我已经说过的那样,由于我想尽可能多地使它变得更有趣
并重新发明轮子 ,所以我自己进行了视频传输,因此在没有更好地发明任何东西的情况下,我决定不传输视频,而是传输jpg格式的帧。 传输一张图像后,停用词“ stop”中毒,并且由于它不会出现在jpg中,因此代码可以轻松区分显示图像的位置和时间。
while bytes('stop','utf-8') not in data: image_result.write(data)
使用opencv播放图片和接收相机。 尚无压缩,因此延迟长达9-13秒。 控制按钮是使用Tkinter编写的。
3D底部模型
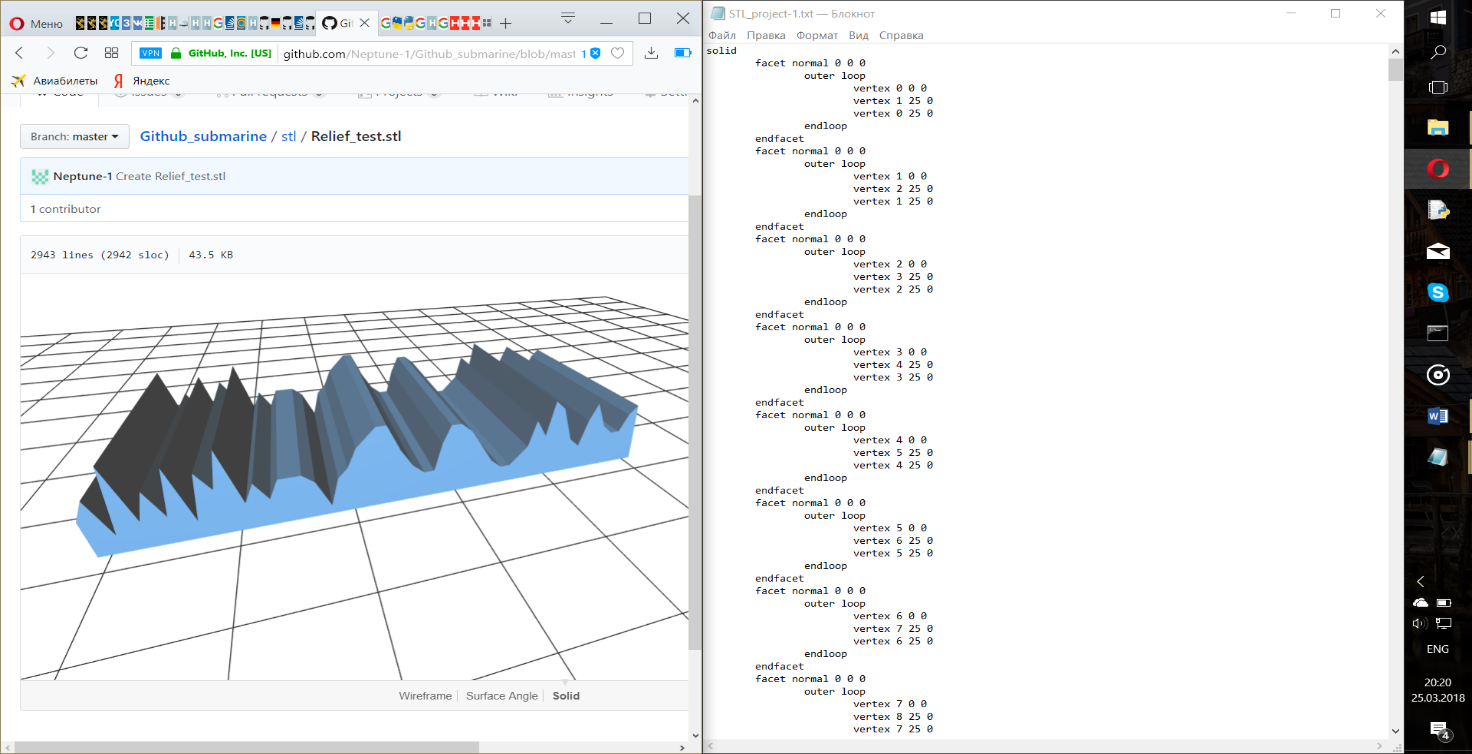
将3D模型上传到github时,我看到了stl文件的组成,并决定编写代码以从超声波测距仪(尚未安装)所走过的距离列表中创建底部地形的3D模型。
txt中的tetrahedron.stl示例solid
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 2 0 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 2 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 2 0 0
endloop
endfacet
endsolid
接下来是有趣的照片,不是很好




总结
实际上,这就是我想告诉的所有内容,我不了解的主要思想是创建了一种设备,该设备可以从距控制笔记本电脑很远的水下接收信息。 再见,直到下一篇文章。