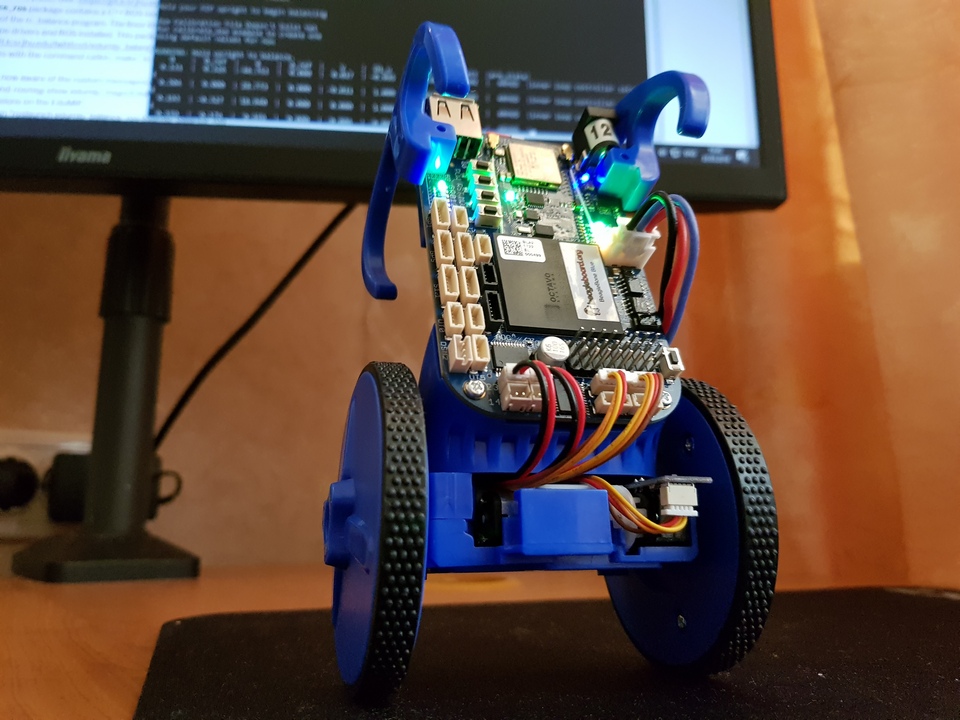
机器人可以在两个轮子上保持平衡,驱动速度非常快。 在完整的Linux上,有wifi。 您可以通过Web界面进行编程。 有在其上运行ROS的说明和资源。 一般来说,创造的机会很多。
我一直想和一个带陀螺仪,加速度计,指南针的机器人一起玩,是的,可以学习ROS。 我不想像以前那样焊接和修补任何东西。 因此,BeagleBone有一台付费PC,带有用于BeagleBone Blue机器人的内置扩展卡,该扩展卡具有必要的传感器和引擎驱动程序。 一段时间后,在美国为他完成了在美国组装EduMip机器人的工具包,他们编写了在源头上启动ROS的说明。 总的来说,我着火了。
套件中包含什么:
- 带电机的轴距/齿轮/车轮/编码器/电线
- 2芯1400 mAh锂电
- 12伏充电器
- 比格犬骨蓝
EduMIP是在UC SAN圣地亚哥协调机器人实验室机器人实验室创建的。 用于在线课程,大学和机器人界。
EduMIP是一个学习平台:
- 不稳定系统的动态建模和反馈控制。
- 机器人运动计划和避免碰撞。
- 通过H桥和编码器进行直流电机控制。
- 通过IMU和晴雨表进行方位评估。
- 通过WiFi(802.11 b / g / n)和蓝牙(4.1 / BLE)进行通信。
- 对(随附的)LiPo 2电池进行充电,平衡,保护和监视。
- Debian Linux中的多线程,面向事件的C编程。
EduMIP与Python,ROS,MATLAB&Simulink和LabVIEW兼容。
EduMip机箱是与WowWee合作开发的。
EduMIP可以轻松地通过3D打印进行扩展,并且拥有一个广泛的软件库,可通过以下方式为数百万个标准传感器和通信设备提供软件:USB,I2C,SPI,CAN,UART(GPS,DSM2),PWM(伺服,ESC),GPIO,ADC。
一样,我不得不购买另一个烙铁来将电线焊接到电动机上,这笔钱我们可以立即进行焊接。 该套件的其余部分质量很高且包装合理。
在一个晚上收集。 在我看来,马达和车轮是松软的。 我很高兴几乎没有必要将所有电子设备都焊接在一块板上。 电池通过电路板充电,从脚本中可以看到电池电压。
对我来说,毫无疑问的是BedgleBone具有内置的wifi和完整的linux。 Cloud9 IDE立即可用,您可以使用python和其他编程语言通过无线方式对机器人进行编程。 该开发板内置了4 GB的内存,已经在上面写入了Linux Debian,因此您可以在没有闪存驱动器的情况下启动和编程。 仅对于ROS,您需要将图像写入存储卡。
在下一部分中,我将分析如何对其进行编程,同时我将继续介绍如何从Debian中的该机器人安装其他库。