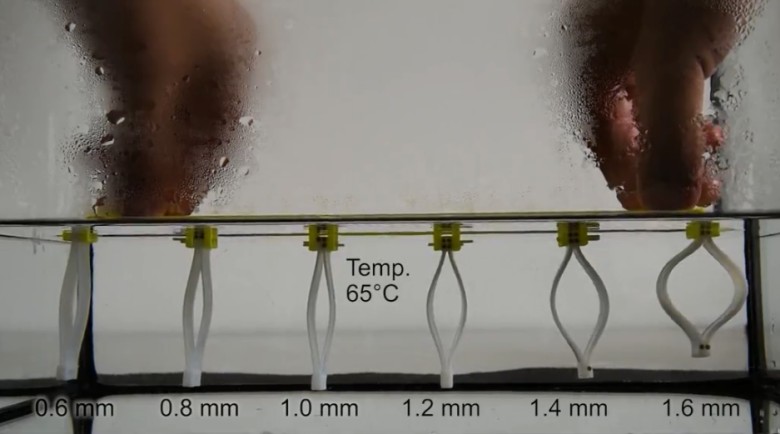
 柔性聚合物条对温度变化的反应取决于其厚度。 此处显示的是放置在65°C的水中时0.6至1.6毫米的条带。 矫直速度从7到37秒不等,您可以按一定顺序对机器人的动作进行编程
柔性聚合物条对温度变化的反应取决于其厚度。 此处显示的是放置在65°C的水中时0.6至1.6毫米的条带。 矫直速度从7到37秒不等,您可以按一定顺序对机器人的动作进行编程加州理工学院的工程师和苏黎世瑞士高级技术学院的同事们
创造了可以独立运动的
机器人 ,而无需使用任何电动机,伺服器或电源。 听起来像永动机吗? 不完全是 事实是,在机器人掉入水中后,每对桨或“肌肉”只能进行
一次桨运动。 但是最重要的是,肌肉和桨的数量可以任意选择-并且它们可以在不同的时间间隔中连续工作。 因此,您可以对机器人的轨迹进行预
编程 ,以及执行各种操作,例如,先卸货再进行躲避动作。 该研究由陆军研究办公室资助。
尽管表面上看起来很简单,但它们是同类设备中首个使用材料变形进行水中温度编程的设备。
演示视频中
显示了操作原理。
视频演示清单
- 一招 。 从一个冲程开始的距离大约相当于机器人长度的1.15。
- “肌肉”对温度变化的反应取决于柔性聚合物带的厚度。 视频显示了放置在65°C的水中时条纹的厚度为0.6mm至1.6mm。 矫直速度从7到37秒不等。
- 具有两对桨的划船机器人的运动 。 中风的顺序由第一对和第二对桨的肌肉厚度调节。 从两次行程开始的距离约为机器人长度的1.9倍。
- 左转运动 。 第一对桨将机器人向前移动大约其身体的0.5,第二阶段的桨将身体旋转大约21.45°。
- 运动两圈 。 第一个冲程后,机器人向左旋转约21.64°,第二个冲程后,机器人向右旋转约21.45°。
- 由另一种材料制成的肌肉在40°C的不同温度下膨胀。 视频显示以前的材料对这个温度没有反应。 因此,科学家可以根据环境温度对机器人进行各种动作编程。
- 一个复杂算法的例子 。 机器人游动设定的距离,放下负载,然后以相反的方向漂浮。 第一个条件是较早燃烧的较薄的聚合物条带提供的。 负载由厚条固定,这些厚条稍后会做出反应,并在机器人驶过编程距离后释放负载。
- 致动器的内部机制显示了肌肉如何将双稳态机制从一个平衡状态转移到另一平衡状态。
根据开发人员的说法,这项研究在某种意义上“消除了材料和机器人之间的边界”,因为材料本身充当设备中的机器:“我们的示例表明,我们可以使用响应环境信号而变形的结构化材料,加利福尼亚理工学院工程与应用科学学院的机械工程与应用物理学教授,科学论文的作者之一Chiara Daraio
说 ,机器人的控制和运动。
机器人由柔性聚合物带驱动,柔性聚合物带在寒冷时会收缩,在加热时会拉伸。 放置聚合物以激活机器人主体中的双稳态开关,该双稳态开关又连接到可移动元件,例如,固定到桨上以向前移动。
这项研究基于
先前关于双稳态元件链的科学工作,以用于传输信号和设计可编程机器的逻辑门。
除温度外,还可以对机器人进行编程,使其根据其他条件执行动作-例如,对介质酸度的变化做出响应。
该科学文章于2018年5月15日
发表在《
美国国家科学院院刊》上 (doi:10.1073 / pnas.1800386115,
pdf )。