在本文的 “热声发动机-不带活塞的斯特林发动机”中 ,我写了关于斯特林发动机如何改进并达到热声发动机状态的文章。 在本文中,我将讨论如何构建和测试您自己的热声引擎。
图1。 四级行波声引擎
行波热声发动机是具有外部热量输入的发动机。 由于最接近斯特林循环的热力学循环的完成,发动机将热能转换成声能。 此外,可以使用连接到发电机的双向涡轮将声能转换为电能,从而获得具有最少运动部件且电效率等于卡诺循环效率的30%至50%的热发生器。
发动机运转的原理是什么?
GIF 1.斯特林发动机alpha型首先,考虑斯特林引擎的alpha类型。 如果我们抛弃所有次要细节,则它由以下组成:一个气体在其中压缩,膨胀和运动的圆柱体; 活塞,实际上是用气体进行操纵的; 提供和除去热能的热交换器; 一个蓄热器,当气体从热的热交换器转移到冷的热交换器时,该蓄热器存储热量,然后当气体返回时,放出热量。
活塞运动之间的相位差为90度,可以实现热力学循环,最终在活塞上产生功。 这就是通常描述斯特林引擎的方式。
但是您可以不同地看待这个过程。 凝视GIF 1几天,人们可以了解到气体压缩,膨胀和运动与声波本质上是相同的。 如果相同,那么这就是声波。
GIF 2单级行波声引擎因此,完全有可能摆脱活塞而将它们替换为声共振器,在声共振器中将形成声波并产生活塞的所有功。
此设计是一种声学自振荡系统,可以与电子自振荡系统进行比较。 有一个环形管形式的谐振器(类似于电路中的谐振电路)和一个放大声振动的元件-再生器(作为电路中正确时间连接的电源)。 当热交换器之间的温度差增加时,穿过再生器的声波的功率增益增加。 当再生器中的增益大于波通过其余元素时的衰减时,引擎将自动启动。
在发动机启动的最开始时刻,不可避免地会出现气体中的噪声振荡。 而且,从整个噪声频谱来看,只有波长等于电动机外壳长度的振荡被放大(具有主谐振频率的波长)。 而且,当发动机运转时,绝大多数的声能落在具有主共振频率的波上。 该声波是行波和驻波的总和。 由于来自热交换器和蓄热器的部分波的反射以及该反射波在主波上的叠加,因此产生了波的驻波分量。 驻波的存在会降低效率,这在设计发动机时必须予以考虑。
考虑自由行波。 这样的波发生在发动机的共振器中。
GIF 3谐振器中传播的声波中的温度和压力图在谐振器中,由于谐振器的直径太大而无法对诸如温度和压力之类的气体参数产生强烈影响,因此波与谐振器的壁之间的相互作用非常弱(GIF。3)。 但是仍然有影响。 首先,谐振器设定波的方向,其次,由于与气体边界层中的壁相互作用,波在谐振器中损失了能量。 在动画中,您可以看到自由波中任意吸收的气体基本部分在压缩过程中会加热,在膨胀过程中会冷却,也就是说,它几乎绝热地收缩和膨胀。 几乎绝热-这是因为气体具有导热性,尽管很小。 在这种情况下,在自由波中,压力与体积的关系(PV图)为一条线。 即,由于气体不起作用,因此对气体也不起作用。
在发动机再生器中观察到完全不同的画面
GIF 4蓄热室中的温度和压力图表在蓄热器的存在下,气体不再绝热地膨胀和收缩。 压缩后,气体将热能释放给再生器,膨胀时会吸收能量,并且压力对体积的依赖性已经是椭圆形的。 该椭圆形的面积在数值上等于对气体进行的功。 因此,在每个循环中执行工作,这导致声振动增加。 在GIF 4中,在温度曲线图上,白线是再生器表面的温度,蓝线是气体基本部分的温度。
波浪与蓄热室相互作用的主要假设如下:第一蓄热室-在蓄热室中存在一个温度梯度,其中热热交换器的温度最大值最大,冷蓄热器的最低温度梯度,第二种假定-气体与蓄热室的表面发生强烈的热相互作用,即,它立即获取蓄热室的局部温度(蓝色)该线位于白色)。
再生器由什么组成? 通常它是一堆钢网。 此处,在动画中,它显示为一组平行板。 这种蓄热器也存在,但比网制造起来更困难。
行波热声发动机由什么组成?
图2。 单级发动机的元件名称关于热交换器,蓄热器和谐振器,一切都很清楚。 但是通常在发动机中,他们会放置另一个二级冷热交换器。 其主要目的是防止谐振器的腔被热的热交换器加热。 谐振器中气体的高温不好,因为热气具有较高的粘度,因此波损耗更高,然后高温会降低谐振器的强度,并且经常需要将谐振器放置在远离耐热设备(例如无法承受的塑料涡轮发电机)的地方升温。 热热交换器和二次冷气之间的空腔称为热缓冲管。 该长度应这样,以使热交换器之间的热相互作用不明显。
当将涡轮机从热热交换器的侧面(即紧接在二次冷的热交换器之后)安装到谐振器中时,可获得最大的效率。
自Peter Zeperli首次提出其设计以来,图2中描述的单级发动机被称为Zeperli发动机。
图3。 四速发动机图可以改进单级设计。 De Block在2010年提出了四速发动机(图3)。 他增加了换热器和回热器的直径相对于谐振器的直径,以降低回热器区域内的气体速度,从而减少气体对回热器的摩擦,并将级数增加到四个。 步骤数的增加导致声能损失的减少。 首先,减少了每个阶段的腔体长度,并减少了腔体中的能量损失。 其次,蓄热区中速度和压力相位之间的差异减小(波的驻波分量被去除)。 这减少了启动发动机所需的最小温差。
所以-您可以用两个,三个或四个以上的步骤构建引擎。 步骤数量的选择是有争议的问题。
在其他条件相同的情况下,发动机功率由平台的直径决定,直径越大,功率越大。 电机外壳的长度应选择为使得振荡频率最好小于100 Hz。 如果外壳太短-也就是说,如果振荡频率太高,则声能损失会增加。
接下来,我将描述这种发动机的构造。
引擎创造
我将描述的引擎是一个测试迷你原型。 没有计划将其发电。 需要开发将热能转换成声能的技术,并且该技术太小而无法将涡轮机集成到其中并发电。 一个更大的原型正在准备发电。
图 4.案例因此,我开始制造该表壳。 它由4个台阶和4个谐振器组成,并且在拓扑上表示一个空心的甜甜圈,该甜甜圈两次弯曲了一半,弯曲了180度。 台阶通过法兰连接到谐振器。 整个身体由铜制成。 为了能够将某些东西快速焊接到体内,并且焊接起来也一样快,这是必需的。 谐振器由外径为15毫米,内部为13毫米的铜管制成。 从外径为35毫米,内部为33毫米的管子上移下来。 从法兰到法兰的台阶长度为100毫米。 船体的总长度为4 m。
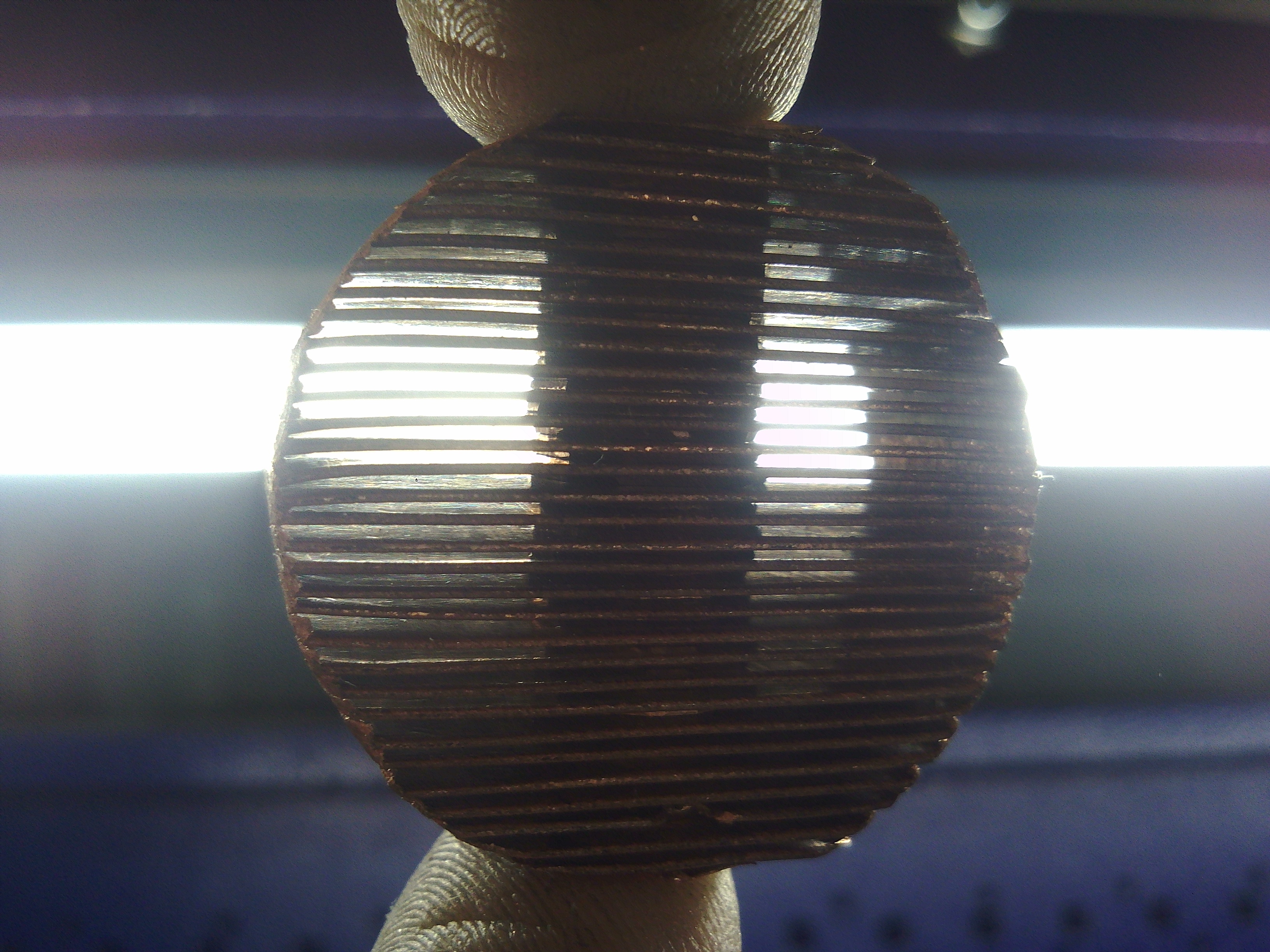
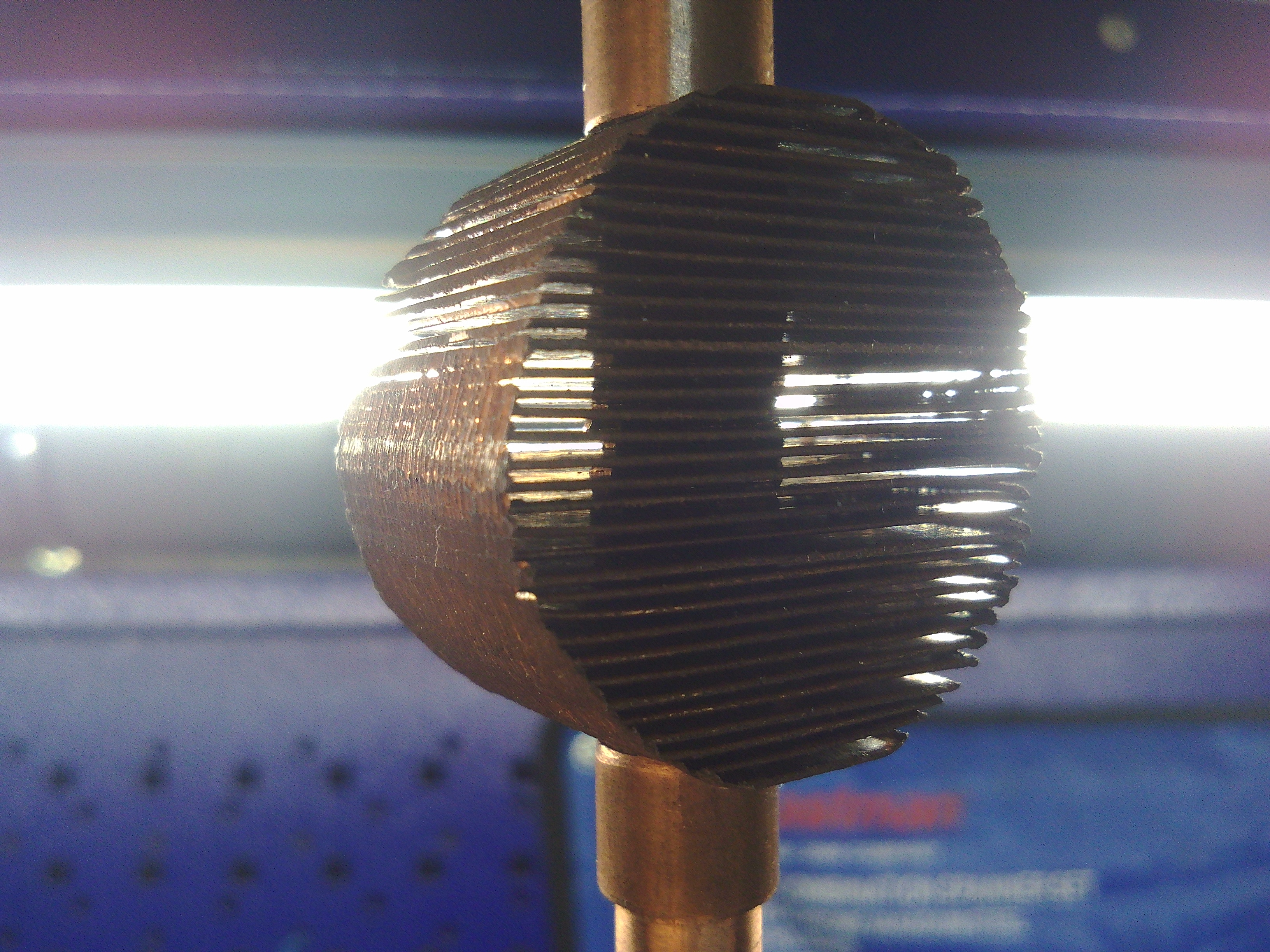 图 5.热(左)和冷(右)热交换器
图 5.热(左)和冷(右)热交换器然后,他制造了热交换器。 这些是板式热交换器。 这些热交换器的主要结构元素是这些铜板和垫圈
图 6.铜板和铜垫圈在热热交换器中,使用安装在中心孔中的镍铬合金线进行电加热。 最大热功率为100瓦。 用电启动发电机是自相矛盾的,但是对于测试原型来说非常方便。 使用电而不是气体或任何其他热能进行加热消除了计算输入热能的难度,因为在电加热的情况下,只需简单地将电压乘以电流即可知道输入热能。 准确测量传入的热功率-这对于计算效率很重要。
通过穿过冷却剂(在这种情况下为水)的中央通道中冷却冷热交换器。 在热交换器中加热的水进入外部冷却散热器,该散热器用作拉达这类超级跑车的炉子的散热器
图 7.加热器的铜制散热器,起VAZ-2101-8101050水通过冷却散热器后,返回到冷热交换器。 水由Topsflo太阳能直流循环泵5 PV循环。
图 8. 12V水循环泵图 9.蓄热室之一图 10.一个阶段的一部分图 11.切面在这些图中,可以看出,除了热交换器和蓄热室外,平台内部还存在铝制插入物。 仅需要它们,以便可以去除用于热热交换器的电线和穿过管壁的用于冷热交换器的配件。 如果没有这些插入件,则有必要通过法兰输出,这是非常不愉快的,甚至是不可能的。 因此,在每个插入件中都有一个直径为13 mm的孔,该孔与谐振器的直径完全相同,因此插入件的声学特性与谐振器没有什么不同-也就是说,它是谐振器的延续。
图 12.外壳中插入铝看起来像是盒子内部的冷热交换器:
图 13.焊接式热交换器电子和测量设备
我选择12 V作为整个系统的主电压,因为您可以轻松找到便宜且功能强大的电源-计算机电源。 我选择了Aerocool VX 650W电源,因为所需的最大电能应该略高于400瓦。
图 14.电源Aerocool VX 650W我将Arduino Mega 2560用作系统控制器,并连接了所有传感器和调节器
图 15. Arduino Mega 2560使用脉冲宽度调制来调节热热交换器的加热功率。 为此,我为Arduino使用了四通道IRF 520晶体管驱动器。
图 16.用于Arduino的四通道IRF 520晶体管驱动器晶体管必须放置在散热器上,因为它们无法通过晶体管以超过10瓦的功率过热。
泵的功率控制也使用PWM进行,但只能通过Troyka-Mosfet V3电源开关模块进行。
图 17. Troyka-Mosfet V3-基于IRLR8113的Arduino电源键使用Arduino的20 A电流传感器测量流过热热交换器的电流。
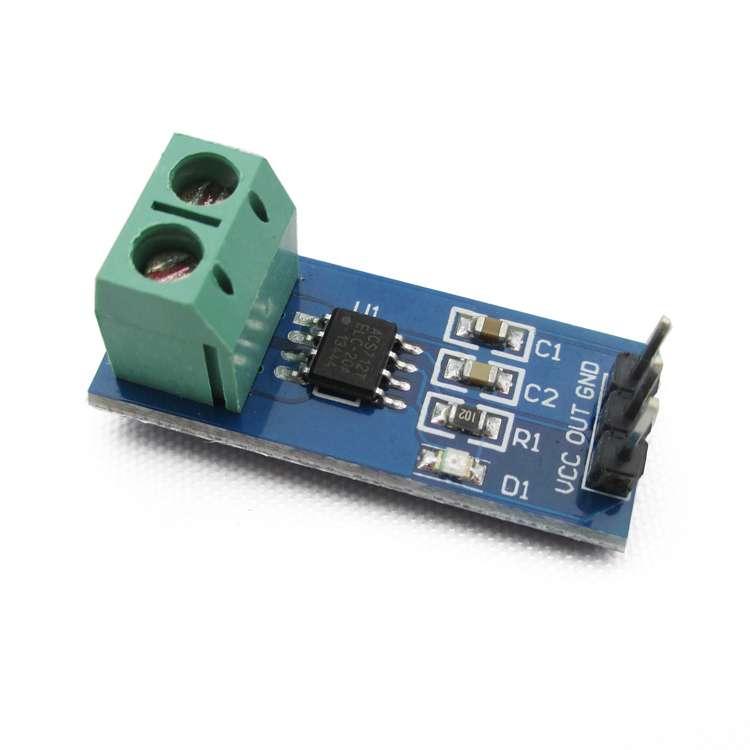
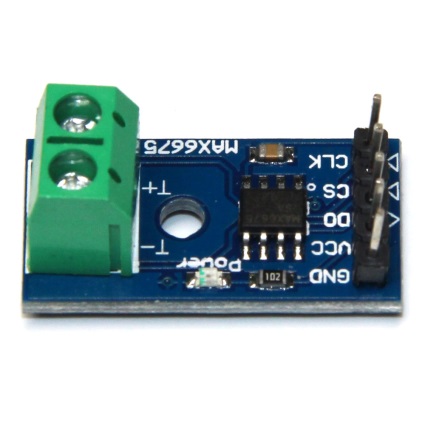 图 18.电流传感器20 A(左)和用于K型热电偶的模块-MAX6675(右)
图 18.电流传感器20 A(左)和用于K型热电偶的模块-MAX6675(右)还必须测量热交换器的温度;为此,使用K型热电偶和K型热电偶模块-MAX6675,该模块可以数字化热电偶的电压,因为它太小了,无法直接提供给Arduino。
图 19.铜管中的K型热电偶热电偶在结侧使用高温密封剂,在导线侧使用环氧树脂胶粘到铜管中。 这样做是为了将它们焊接到铜制电机外壳中
现在,仅需测量发动机中的压力和声振动,即压力波动,以找出发动机的声功率。 一方面,可以使用相同的绝对压力传感器测量发动机每个循环的平均压力(参考压力)和正弦压力波动。 但是在这种情况下,由于压力波动的幅度比参考压力本身小10倍或更多倍,因此不会涉及传感器的大多数测量范围。 即,仍然有较小的分辨率来精确地测量压力波动。 因此,需要分离参考压力和压力波动,以便通过另一个传感器测量压力波动,该传感器的测量范围适合于波动的幅度。 为此,制造了一个小的缓冲罐,并通过一根非常细的毛细管将其连接至发动机腔。 该管非常细,以至于以1个大气压的压力通过它填充水箱大约需要3秒钟。
图 20.缓冲罐,用于测量谐振器中的压力波动为什么都做完呢? 并且由于缓冲罐中有毛细管,因此形成了每个循环的平均压力,因为发动机中的典型振荡频率为80 Hz,即周期为0.0125秒,并且以振荡幅度增加压力大约需要一秒钟。 因此,油箱中的压力波动被排除在外,但同时每个周期都有一个平均压力,并且该油箱与发动机之间的相对压力已经可以测量。 这正是我们所需要的。
使用脚踏泵可以将发动机中的压力提高到5个大气压。
为了测量每个周期的平均压力,将MPX5700AP绝对压力传感器连接到缓冲罐,并将MPX5050DP压差传感器连接到缓冲罐和发动机谐振器之间以测量压力波动。

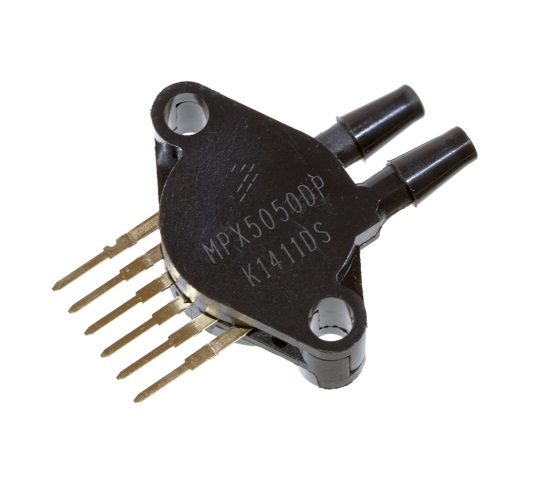 图 21.绝对压力传感器MPX5700AP(左)和压差传感器MPX5050DP(右)
图 21.绝对压力传感器MPX5700AP(左)和压差传感器MPX5050DP(右)首次发射
图 22.发动机在黑暗中运转时,传感器发出美丽的光芒启动发动机的第一次尝试是在准备好四个阶段之一的情况下进行的。 其余步骤为空(没有热交换器和再生器)。 将热热交换器加热到最高250摄氏度时,它没有启动。
然后,分两步进行了第二次发射尝试。 台阶之间的距离为外壳长度的一半。 同样,当将热热交换器加热到250度时,发动机没有启动。 在所有实验中,冷热交换器的温度约为40摄氏度,在所有实验中,工作流体为具有大气压的空气。
在所有四个阶段的工作中,首次成功启动。 发射时热热交换器的温度为125度。 当以372瓦的最大热功率运行时(即每个热热交换器93瓦),热热交换器的温度为175度,冷时为44。测得的振荡频率为74 Hz。 谐振器中的声波功率为27.6瓦。 尚未测量将热能转换为声能的效率,因为这需要在台架之前和之后放置额外的压力传感器,以测量台架中声功率的增加。 此外,为了确定效率的实验,有必要在发动机内部放置一个负载,但这是以下内容的主题...
在4个阶段中的3个阶段,发动机也可以工作。
三个热热交换器在启动时的温度约为175度。第四个-未使用的阶段同时以热泵或冰箱的模式工作(这取决于角度,我们需要的是加热还是冷却)。即,空载级的冷热交换器具有与所有其他冷热交换器相同的温度,并且热热交换器开始冷却,这是因为声波从其中去除了热能。在实验中,以此方式获得的最大冷却为10度。启动时令我惊讶的是,绝对紧密度对于设备正常工作并不重要。也就是说,在第一次启动时,缓冲罐和压力传感器应连接的管道没有堵塞。两个孔中的每一个的直径约为2.5mm。也就是说,发动机是完全防漏的,但这仍然不能阻止其成功启动和运行。人们甚至可以将一根手指放在试管上并感觉到空气的振动。当管子堵塞时,热热交换器的温度开始显着下降(下降20-30度),冷热交换器的温度上升5-10度。这是直接的证据,在密封期间,由于热声效应,壳体内部的声能增加,因此热交换器之间的热传递增加。然后,许多人担心发动机在运转过程中会很大声。确实,您可能会这样认为,因为在谐振器中测得的音量为171.5分贝。但是,总的来说,整个波都被封闭在引擎内部,实际上它是如此的无声,以至于其工作只能由外壳的轻微振动来确定。邀请参加该项目
我在Engels的热声学帮助下,在Sol-En工程俱乐部中创建。那些也受到创新方向的启发并且希望将来加入的人们,用自己的信息写下您来自哪个城市的信息。