加速:老妇人声称“ Moskvich”变速箱不合格
©M.Zhvanetsky“四十一”
1985年,一辆新车Moskvich-2141出现在苏联。
按照计划,小三班的这辆车将占据小二班的大众“八”型VAZ-2108与享有盛名的中产阶级伏尔加河GAZ-24-10之间的消费市场。
一辆相当宽敞,高速,舒适(按苏联标准)的汽车,带有一些别致的元素(标准配置中的VHF无线电!),这是苏联人的梦想。
除了...超出本文讨论范围的许多原因外,这还由于缺乏足够强大的发动机和自动变速器而受到阻碍。
而且如果应该通过从UZAM-331.10和VAZ-2106切换到新的发动机系列AZLK-21414来解决该发动机问题,并开始建造新工厂,那么自动变速箱将使所有事情变得更加令人难过。 严格来说,没有一辆大型苏联汽车可以拥有自动变速器,包括第24伏尔加河(Volga)对苏联命名法的梦想极限。
但是,仍然有一些想法,对于那些对苏联汽车技术的历史感兴趣的人,欢迎切入
在第41届Moskvich正式诞生之前,就出现了基于Moskvich变速器的自动变速器的想法,首先是通过毕业项目的形式,该项目由本文的作者(当时是MAMI的一名学生)在美国提出,然后在UKER AZLK中提出。在作者的倡议下(主要是用自己的双手),首先是“在业余时间里完成主要工作”,然后是在各种“创造有希望的技术的计划”的框架下。
- 应当指出,除了本文中考虑的为Moskvich-2141家族的系列汽车开发的无级变速器外,AZLK还开发了另一种有趣的基于环形变速器的无级变速器,作为2000年度汽车项目的一部分,但是“这完全不同。历史”,则需要进行单独的大型对话。
由于该变速箱原本应该安装在现有产品的汽车上,实际上在设计上是无法接受的,因此要求该变速箱的安装不得在车身上(直至安装点)进行任何改动,也不得进行其他部件和组件的改动(例如,排气系统,靠近变速箱,转向齿条,位置稍高等)。 这对结构的尺寸施加了严格的限制。
例如,在这张有关CVT案例的照片中,您可以看到“脚手架”(红色圆圈),其目的是为了分散与车身通道的必要间隙。无级变速
德国
PIV公司的带平滑皮带轮的“ V链” CVT被广泛用于需要平滑变速比的船舶发电机,造纸机和其他工业设备的驱动器中,被用作无级变速器的基础。
大众汽车在同一变速器的基础上设计了无级变速箱,不久之后,吸收了PIV的
LuK创造了AUDI的无级变速
Multitronic变速箱。
关于为什么选择PIV变速器的几句话,而不是当时比较流行的
Transmatic 。 在所有其他条件相同的情况下,PIV变速器的“皮带”(更确切地说是链)比Transmatic金属皮带具有更高的承载能力,并且如上所述,对无级变速器的尺寸施加了非常严格的限制。 通常,当时Transmatic仅用于扭矩最大为80-100 Nm的小型汽车,在这种情况下,无级变速箱应该与扭矩最大为160-180 Nm的新系列AZLK-21414发动机一起使用。
另一个同样重要的原因是,计划在现有的机械制造厂掌握无级变速器的生产,而且Transmatic金属带的设计过于具体,需要组织特殊的生产。
同时,PIV链带在结构上与通常的齿轮链类似,在生产中得到了很好的开发,并在工业中得到了广泛的应用。 区别仅在于轴的两端具有特殊的表面,这些表面沿着皮带轮的光滑圆锥形表面工作。 在这种情况下,车轴由15轴承钢制成,从制造技术的角度来看,它们与滚动轴承的零件非常相似。
因此,可以在苏联的一家轴承工厂掌握PIV型链的生产。
尽管无级变速器的原型是一件成品,但该设计立即被设计用于批量生产。 因此,所有文档均在“公差范围内”进行,因此无需安装零件即可进行组装。 卡特(Carter)原型虽然是根据木制模型铸造在地下的,但也专为注塑成型而设计。 其他细节也可以这样说。 因此,尽管它只是一个原型,但实际上是在量产条件下制造的。 这与“使用文件”组装的大多数自制产品不同。
大多数零件是在UAER AZLK的实验车间以及汽车制造厂的其他制造商中制造的,其中很大一部分加工是通过“转换”为
NPO Almaz进行的。无级变速箱设计
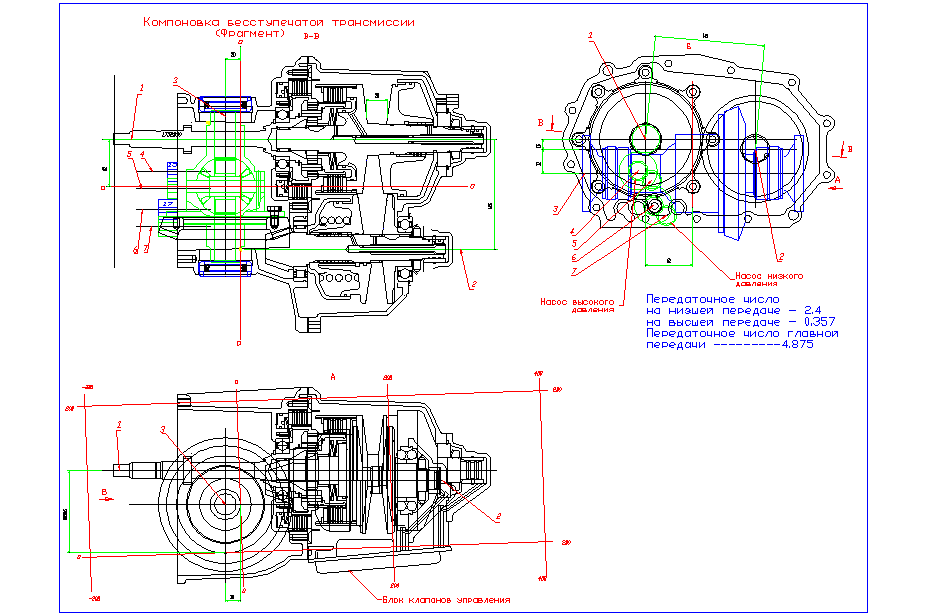
在布局图上,您可以看到无级变速器变速器在主动轮和从动轮之间的中心距离为145 mm,最大和最小齿轮比分别为2.4和0.357(1 / 2.8),即齿轮比范围为6.7(齿轮比略微不对称)以减少“低速档”中链条上的负载)。 相对较小的最大齿轮比需要较大的4.875主齿轮比,幸运的是,准双曲面齿轮允许这种情况。
压紧皮带轮,并使用位于皮带轮中的液压缸来改变变速器的传动比。
由于与齿轮传动不同,变速箱的驱动轴和从动轴的旋转方向相同,因此为了确保汽车车轮所需的旋转方向,主齿轮被证明是``倒置的''(驱动齿轮位于从动齿轮的另一侧)。 除了所需的旋转方向外,这还可以将变速器的驱动轴和从动轴推至所需距离。
结果,例如,如果将这种无级变速器的设计与Multitronic设计中的“相关”变速器进行比较,它会变得更加简单和紧凑。*借助“湿式”多片离合器换挡的行星齿轮实现了倒车。 它们还提供了使汽车行驶的功能,因此在这种情况下没有变矩器。 通常,离合器和倒档的设计类似于Transmatic方案,但是在布局特征,变速器的设计以及变速器和离合器的液压控制系统方面存在一些差异。
- 小小的“抒情离题”。
如果我们将这种无级变速箱的设计与Multitronic进行比较,那么设计人员训练有素的眼睛将能够注意到某些技术解决方案的巧合。 在这种情况下,“所有匹配都是随机的”。 事实是Multitonic设计的第一批公开出版物仅在90年代后期才出现,即 在设计了Moskvich无级变速器后约10年。 当然,Multitronic以前是设计的,但是文档自然是封闭的。 显然,仅是需要将笨重的工业PIV变速器设计与紧凑型汽车变速箱配合使用,这迫使设计师们朝着同一方向发展。
- 但是Transmatic设计已经有了一些可用的信息,因此当然要考虑到与Transmatic金属带和PIV链的结构差异,发动机的纵向位置以及无级变速箱液压控制系统的特征相关的特征。 。
结果,Moskvich无级变速箱的质量仅重50公斤(尽管在大批量生产中铸造的曲轴箱比注模成型要重一些),仅比Moskvich手动变速箱重8公斤。
还有一些照片。无极变速箱的设计工作于1985年正式开始,1987年,由于在索科利尼基国际展览会期间与PIV的代表进行了会晤,他们对这项工作表现出了浓厚的兴趣,因此他们得以大大加快发展,并于1988年初签署了《意图。”
1988年,开始生产原型零件。 根据计划,这项工作原定于1992年完成,但是在这一阶段工作进展非常缓慢,实际上停止了几次,因此原型仅在1995年才组装完毕。 我们将回到更低的水平。
变速箱控制系统
作为控制系统,最初假定使用的是纯液压系统,带有液压“逻辑”,皮托管等。
但是,即使是这种“最简单”的控制系统,在当时的汽车生产中也不具有特征,因此出现了问题。 但是,在80年代末期,随着Perestroika的兴起,许多合作社和小型企业,包括研究和生产企业,欣然接受了这类工作,它们是在国防企业的基础上兴起的。
在这种情况下,设计了一个基于TsIAM成立的小型企业。
提出了一种具有电子逻辑的电液系统,为此可以使用串行阀和用于电力系统和飞机发动机控制的电子元件。
控制系统是一个单独的板,安装在变速箱底部的窗户中。
照片显示了安装控制板的位置,控制板带有用于控制变速器和离合器的动力液压的通道。
控制系统的液压部分由发动机驱动的齿轮泵提供动力。 使用了半干式油底壳循环系统;为此使用了第二个泵(低压),通过粗滤器和精滤器将油从CVT箱泵送到主变速箱。
这项工作始于1988年,到1992年,在航空工厂的一家小型企业TsIAM分包商
的工厂制造了原型。
不幸的是,此时还没有进行变速箱采样,因此变速箱控制系统的“婚礼”一直都在延迟。 最后,这家小企业破产了,原型控制系统丢失了。
控制算法
控制系统必须根据其中规定的算法来控制变速箱。
汽车变速箱的主要任务之一是通过选择最佳变速箱(在分步变速箱的情况下)或无级变速比(在变速箱的情况下)来确保发动机在任何车辆行驶条件下均以最佳模式运行。
因此,在任何负载下,发动机都应以给定负载下的最低油耗运行。
- 当然,除了特定的消耗量外,还应考虑其他参数,例如毒性,发动机磨损,噪音,节气门响应等。
这可以在发动机的多参数特性上看到。
在其上,横坐标轴表示发动机曲轴的旋转速度,纵坐标轴上的坐标转矩*,此外,还显示恒定功率双曲线,并且从最小(绿色)到颜色显示每单位功率的单位燃料消耗量(克/ kW * h)。最大值(红色)。
- 在这种情况下,采用相对的多参数特性,在该特性上相对于其最大值显示发动机转速和扭矩。
可以看出,在相当大的发动机功率和转速范围内,最小比消耗在最大扭矩的大约50%至80%的区域内。
您可能会注意到,即使在发动机功率较低的情况下,也希望其扭矩相当大,并且速度必须最小。 随着功率的增加,发动机转速也应增加,并且在这种情况下的最佳扭矩变化很小。 好吧,有了最大的功率,别无选择,没有时间节省时间,因此负载和速度是最大的。
在使用手动变速箱的情况下,驾驶员自己可以选择所需的档位,并通过油门踏板调节负载。 例如,在强烈加速或在上升或越野行驶的情况下,这可能是第二档,而在SAME SPEED(安静)行驶时安静地行驶,则可能已经选择了第五档。
在自动变速箱的情况下,驾驶员可以通过油门踏板设置操作模式,而变速箱本身可以选择所需的档位。
好吧,在变速箱的情况下,齿轮比会无级变速,从而允许发动机根据油门踏板的位置在给定负载下以最佳模式工作。
乍一看,用于控制无级变速器的算法似乎比有级自动变速器更简单,但这并不是完全正确的。
那些使用CVT驾驶80年代汽车的人(例如,福特嘉年华或菲亚特Uno)可能已经注意到,在移动障碍物(颠簸,颠簸或整备)后,发动机会“ how叫”一段时间(速度明显波动)。 事实是,障碍物会导致负载急剧增加,因此控制系统迫使变速箱增加传动比,然后负载减小,变速箱的传动比也下降,结果发生振荡。
这些汽车的另一个令人不快的特征是,例如在超车时猛踩油门踏板时会感觉到“离合器失灵”。 控制系统接收到有关需要显着提高发动机转速的信号,并试图快速增加变速器的齿轮比以使其加速。 由于发动机如此快速的加速,其所有扭矩都花在了其自身飞轮的松开上(大约与您在空挡上踩下油门踏板时大致相同)。 当然,半秒钟后,发动机将达到所需的模式,汽车将加速行驶,但是在此期间,驾驶员将有时间获得负面情绪。
如果只是“钝化”控制系统,减慢其反应速度,则汽车将开始用油门踏板“平滑”思考,这也是不希望的。
原则上,如果变速器控制算法不仅响应曲轴转速,而且响应曲轴的一阶且最好是二阶导数(转速的加速度和加速度的加速度),则可以避免这些麻烦。
在这种情况下,变速器和发动机不会对负载的突然变化和油门踏板的剧烈操作做出“紧张”的反应,同时,它会“敏感”地监控较小的负载波动和油门踏板的最小运动。
当然,对于当前的数字控制系统,这是容易解决的任务,因此,在具有无级变速器的现代汽车上,上述缺点实际上得以消除。
但是,在80年代后期的液压传动和更先进的电子逻辑变速箱中,这很难实现。
在所考虑的变速箱中,使用了50年代末提出的技术科学博士 V.A. Petrov原始控制算法没有此缺点。
此外,作为控制变速箱齿轮比的“参考信号”,不是使用发动机转速,而是在飞轮之后立即测量其扭矩(在这种情况下,这是一个重要的保留!)。
当然,为此必须具有扭矩传感器,但是在这种情况下,其最初是为了根据相同的扭矩来调节皮带轮的液压缸中的压力而设置的。
通过变速器足够长的输入轴的旋转角度来测量扭矩(请参见本文开头的图示)。
为此,根据可计算扭矩的相位差,在输入轴前端和后端附近的齿轮圈上使用了两个霍尔传感器。 嗯,这些霍尔传感器之一也可以用来测量发动机转速。
为此变速器控制算法发行了本发明的版权证书。
此外,其他技术解决方案也获得了其他几种版权证书和发明专利。
结语(史诗)
不幸的是,原型无级变速器的制造时间几乎与总干事鲁本·阿斯塔扬(Ruben Astaryan)的AZLK权力上升同时发生,在此期间,工厂开始遭受痛苦。在这种情况下,不可能进行正常的测试,更不用说生产的发展了。好了,几年后,汽车厂本身终于破产了。但是,“这是一个完全不同的故事”,令人难过和非常难过...
PS:可以在我的相册中查看高分辨率的照片
PPS我试图写这篇文章很长时间了,但是由于一些主观原因,它根本没有用。最后,我意识到,如果我现在不发布它,那我将永远不会写。对于某些混乱,我深表歉意,通常我写起来容易些。如果对此主题感兴趣,那么可能会继续。
谢尔盖·阿斯兰扬(Sergey Aslanyan)“车库”节目中的“莫斯科回声”播出[07/31/2018]