曾几何时,我遇到了VL-76-S电子数字时间开关,该开关是新包装的,但处于故障状态。 在内部的印刷电路板上未发现缺陷。 因此,工厂联姻,固件损坏。
继电器的一般视图。使我们感到惊讶的是流行且简单的微控制器ATTiny2313的使用。 在外部,此设计包括一个具有三十个开关形式的主机和一个端子,该端子上连接有220V电源和EM继电器的触点。 任务范围是0.1 ... 99.9分钟。 以0.1分钟为增量 (6秒)。 互联网上这种设计没有电路和固件,这不足为奇。 我三思而后行,决定从印刷电路板上绘制电路,以后自己在MK上编写程序。
该设计由三个互连的印刷电路板组成。 在第一块板上,制作了电源设备和TRA3执行继电器。 电源是根据无变压器电路制成的:使用淬火电容器来降低电压。 在第二块板上是ATTiny2313 MK和其他辅助元件。 第三块板上有开关(设定点)和控制LED。
从背面看的第三张照片。我将从第三块板开始描述。 开关是10位开关。 它们上没有标记,每个都有5个触点。 因此,取决于位置,某些触点以各种组合闭合。 调用触点后,我立即抓住了模式:根据与所选位置的编号相对应的数字的二进制表示形式,一个固定输出(常规)与其他四个输出(信息)关闭。 例如,如果选择位置“ 3”,则通用输出(连续第五个)与第三和第四个输出关闭,因为二进制表示中的数字“ 3”为“ 0011”。 这是一个棘手的开关。 其中有三个。 它们通过XP1和XP2连接器通过MK连接到第二块板。 XP3连接器连接LED和其他一些不必要的无焊废料,在板上需要放置这些废料。 这很可能是常见的六针DPDT开关(例如方形的,例如PB22E06)。 主板也许是通用的,但在此特定型号中并未使用。
第二(主)板的照片。打电话给交换机的触点,我并没有立即理解它们与MK端口的连接原理。 在主板上,立即可以看到8个SMD晶体管。 后来他发现这些晶体管与公共阳极一起用作二极管对。 它们的基极去MK端口,集电极和发射极去开关触点。 然后他们向我解释说,在这种情况下有二极管对,它们像晶体管一样响,但是它们不是晶体管。 总共,我们有16条导体,将二极管对留在第三块板上。 其中四分之三(12个)到达开关的信息触点(3到4个),还有4个保持空闲。 很容易猜测,从理论上讲,它们是为第四个开关提供的,由于某种原因,它在板上根本没有空间,因此并没有出现。 然而,为了不违反推理的逻辑,我将提到这个虚构的第四开关。 第二和第三开关的公共端以及第一和第四开关(但第四开关不提供该板)通过XS1和XS2配合连接器上的主板中的走线成对连接在一起。 这两对连接到晶体管组的输出。 这两个相同的组在晶体管BC857和BC847(不同的结构)上制成。 它们的输入连接到MK。 将逻辑“ 0”应用于该组的输入时,输出也将是逻辑“ 0”。 另外,板上有一个用于MK固件的XP2连接器,连接到MK接口的SPI端子,一个用于LED的XS3连接器,以及一个通过电缆连接到第一块板上的XP1连接器。 应当记住,某些MK端口既可以用于SPI(用于固件),也可以用于普通的输入输出(电路中的工作)。
以上所有内容均反映在我首先在草稿中绘制的图表中,然后在SPlan中绘制。 图中没有标出未标记的无线电元件的额定值(例如SMD电容器),它们并不是那么重要。 首先,我将给出主板和带有设置器的板的示意图(下图的签名)。
主板方案。第三委员会与二传手的方案考虑一下每个二传手的审问。 来自端口PB4和PB5 MK逻辑“ 0”的信号打开晶体管VT2和VT1,接着打开VT4和VT3,分别连接到开关1和2的零总线公共触点。 这是依次发生的。 首先,逻辑“ 0”来自PB4(迄今为止PB5设置为逻辑“ 1”),连接第二和第三开关。 在这种状态下,信号的值由控制器依次从输入端口PB3,PB2,PB1,PB0通过第二和缺失的第四开关的二极管组2VD1 ... 2VD4记录下来。 立即,来自引脚PD6,PD5,PD4,PD3 MK的信号值被固定,来自第一和第三开关的信号通过二极管组2VD5 ... 2VD8固定到该引脚。 但是,由于仅第二和第三开关通过公共触点连接,因此来自第二开关的信号将到达MK的第一个指定端口,而第四个将被忽略。 同样,来自第三个开关的信号将到达MK的后半部分,而第一个将被忽略。 在此阶段,控制器知道第二和第三开关安装在哪个位置。 之后,将PB4设置为“单位”,关闭第二和第三开关,将PB5设置为“零”。 在这种情况下,第一和缺少的第四开关通过公共端连接到“外壳”。 它们的询问与前面的情况完全相同,但是现在将记录上次被忽略的那些开关的信号。 因此,控制器知道所有开关的位置信息。 此过程类似于轮询矩阵键盘,但在这种情况下为4层矩阵,尺寸为2 x 2,但缺少一个元素。
电阻器R8 ... R15-上拉电阻。 虽然,可以“拉起” MK本身。 精确的时钟频率MK可提供10 MHz的石英。 R1和C4-MK重置电路。 该板上没有其他有趣的东西了。
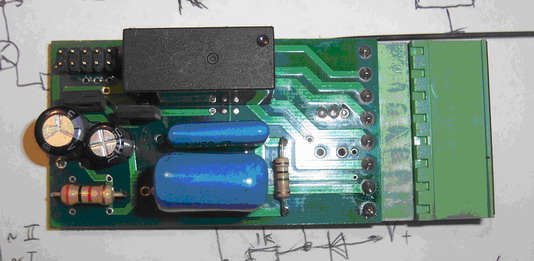 元素侧面的第一个(电源)板的照片。
元素侧面的第一个(电源)板的照片。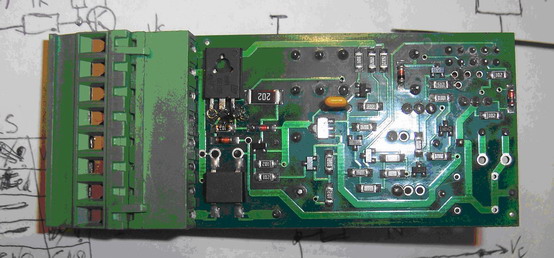 背面第一个(电源)板的照片。
背面第一个(电源)板的照片。让我们继续第一块板的方案(上图)。 该计划似乎非常有趣,在某些地方令人难以理解。
 第一(电源)板的方案。
第一(电源)板的方案。C1C2-降低电压。 R1-放电以上。 在二极管电桥DB1之后是两种电解质。 为了使电路复杂(或出于可靠性考虑)-级联稳定方案VT3R6VD3-VT7R12VD5。 VD5类似于未使用的发射极SMD晶体管。 这样可提供稳定的12V DC电压。 接下来是5V的VR1线性稳压器。 同时,电压从DB1二极管电桥通过VD2二极管移至另一个24V VT1R3VD1稳定器。 该电压提供给EM继电器Rel1的线圈和R17。 后者不清楚原因。 R17的另一端来自晶体管组VT9VT10。 该组的电路与主板上的电路相似。 来自单独的MK PB6端口的信号通过连接器到达该晶体管组的输入。 为什么需要它? 为什么将R17电阻连接到24V? 最有可能的想法是,您可以通过以某种方式对PB6 MK端口进行编程来代替电阻,例如放置内部控制LED。 或其他交换节点。 但是,同样,这是胡说八道,正如我的熟人无线电工程师在看过设计板时所说的那样。 EM继电器Rel1的第二端连接到类似的晶体管组VT2VT5,并且连接到MK PD0端口。 来自该端口的信号“ 0”打开正在执行的EM继电器。 最有趣的是,外部LED通过两个连接器(通过主板)不与EM继电器并联,而是与VT2晶体管的发射极间隙相连。 在端子上,根据继电器上的标签判断,插针编号1和2保持为空。 但是在该电路中,第2号触点连接到公共线,第1号触点被馈送到晶体管组VT6VT8的输入。 该组的输出发送到PD2 MK端口。 稍后,我阅读了该继电器模型的规范,这些触点用于控制在相同情况下组装的其他继电器模型。 我正在考虑的模型不涉及控制,但是在MK上编写程序时可以实现,因为该方案提供了这种机会。 在控制之下可能意味着启动,重置(在“触发”模式和正常模式下)以及所有想到的东西。 其他继电器的规格显示了时序图,这些时序图显示了继电器的行为(取决于给定的控制信号)。 它还在下面说:应客户的要求,我们可以实现任何可能的图表。 以及计划的最后时刻。 来自端子1的控制信号也到达无用的VT4晶体管,由12V电压供电。 再次,这是该方案的复杂性。 也许还有一些想法? 我没有深入研究。 我将很高兴收到任何评论。
连接器端子的标记在连接器本身的名称之后通过点号进行标记。 “〜”符号后的罗马数字表示无用和遗漏的结论。 后者在计划中并不少,但我将不再赘述。 下面,我用连接器的名称,结论和基本元素来给出每个电路板的草图。
 板草图。
板草图。考虑对MK程序的源代码的描述。 该程序本身很简单,由我用CVAVR编写了20分钟。 我将讨论执行程序的算法。 对于某些人来说,这些信息似乎是很平庸的,但是对于初学者来说,这并不是多余的。 在我的算法版本中,时间继电器上的计时器将不被询问一次,而是被连续询问。 而且,即使继电器跳闸后,轮询仍将继续。 这样您就可以随时随地进行调整。 也许此算法与该继电器的操作与原始算法不一致,但是我对原始算法并不熟悉。 在上述算法的示例中,将考虑程序的描述。
带说明的C程序的源代码。我们连接了用于ATTiny2313 MK的库,以及延迟功能的库。
#include <tiny2313.h> #include <delay.h>
接下来,根据MK端口的电路分配,进行必要的宏替换。 这些替换很方便,因为您可以在程序文本中而不是例如PORTB.5中编写getAD,这更加方便。 编译getAD将解释为PORTB.5。 因此,第一个替代是用于连接第一(A)和第四(D)设定点开关的输出。 第二个用于第二个(B)和第三个(C)。 接下来是启用中继的替换。 最后,在程序和所考虑的模型中未使用的“ Ctrl”替代。 你不能写。
#define getAD PORTB.5 #define getBC PORTB.4 #define RL PORTD.0 #define Ctrl PIND.2
变量A,B,C用于存储对应的三个开关的位置编号,并采用0到9之间的值。
unsigned char A,B,C;
变量i-十分之一分钟(6秒)的数字的当前值,即继电器最小“刻度”的数字。 变量t是从主机收到的十分之一分钟(滴答声)的数量。
unsigned int i=0,t;
该程序的主要功能如下所示。 在前6行中,我不了解。 它们是使用辅助实用程序CodeWizadAVR形成的,并且与10 MHz处的外部石英有关。
void main(void) { #pragma optsize- CLKPR=0x80; CLKPR=0x00; #ifdef _OPTIMIZE_SIZE_ #pragma optsize+ #endif
以下两行配置了我们的MK的端口B。 根据该方案,我们将低4位输入到输入,将最高有效位输入到输出(不使用PB7,而PB6无用,但从理论上讲是输出)。 因此,根据我将不描述的MK配置原则,我们将数字240写到DDRB寄存器(F0以十六进制表示)中。 初始输出电平为“ 1”,除了不必要的PB7以外。 为了以防万一,让我们将MK的“上拉电阻”连接到输入,即使它们已经安装在电路中。 为此,我们以十六进制表示形式将PORTB寄存器设置为7F。
PORTB=0x7F; DDRB=0xF0;
端口D的配置方法相同,除了下部的两个引脚外,输入上的所有引脚均如此。 输入上的“上拉电阻”与输出上的初始输出电平“ 1”相似。
PORTD=0x7D; DDRD=0x03;
以下五行与MK计时器之一的配置有关。 该计时器为十六位数字,也就是说,它的得分最高为2 ^ 16 = 65536。 计数频率由MK时钟频率和分频系数(五个预定义值之一)确定。 在描述的程序中,决定保留一个帐户6秒钟(最小任务步骤),然后将变量i增加1并将计时器重置为计数的开始。 为了确保上述效果,您需要采用最大除数比1024并计数为58594。后者很容易计算。 MK频率-10,000,000 Hz。 使用1024的分频比,计时器频率将为10,000,000 / 1,024 = 9,765.625 Hz,周期将为1,024,000 / 10,000,000 = 0.0001024 s。 在6秒内,将堆叠6 / 0.0001024 = 58593.75的此类时间段。 此数字位于16位定时器中,但不是整数,因此必须四舍五入为58594。在这种情况下,我们的时间继电器的误差将不明显:58594-58593.75 = 0.25; 0.25 * 0.0001024 = 0.0000256; 0.0000256 * 999 = 0.0255744。 即,对于最大可能的时间段(99.9分钟),此时间继电器的不准确性将约为25.6毫秒,这在实践中是可以接受的。 顺便说一句,制造商还规定了设备的错误,我们的错误也不会更严重。 在TCCR1B定时器配置寄存器中,写入值5。不赘述,这意味着定时器启动,并且分频系数为1024。在TCNT1寄存器中,我们写入值0。该寄存器为16位,分为两个8位,一半:最小的(L )和高级(H)。 将值写入该值,计时器将从该值开始继续计数。 我们需要从头开始计算。 值OCR1A寄存器,定时器将在该值之前读取,之后它将调用中断功能。 此时,程序的主要功能被中断,并执行该中断功能中指定的动作。 练习完中断后,主功能将继续执行。 如上所述,该值等于58594(十六进制表示法为E4E2)。 由于OCR1A寄存器也分为两半,因此我们将上述值分批写入。
TCCR1B=0x05; TCNT1H=0x00; TCNT1L=0x00; OCR1AH=0xE4; OCR1AL=0xE2;
接下来的两行正确配置了中断的解决方案(不赘述)。
TIMSK=0x40; #asm("sei")
在主周期中,将使用30 ms的延迟不断轮询设定开关(根据电路说明中的算法),以确保正确稳定的运行。 通过在PORTB.5上将值设置为“ 0”(getAD = 0),我们准备了第一个开关。 其结论是将MK的端口D连接到引脚6、5、4、3。方向是从最小到最大。 也就是说,开关的低位连接到端口MK的相对低位(位3)。 因此,为了在第一个开关的位置上从MK的端口D接收信息,必须向右移三个位置(PIND >> 3),使用“〜”操作将接收到的位取反(因为根据方案,信息将为“ 0”)并将接收到的8位值的不必要的高4位复位。 最后的操作是通过将结果与数字15进行逻辑按位相乘(二进制表示为00001111)来完成的。 完成该操作后,将为变量A分配第一个开关的位置值。 接下来,关闭第一开关,准备第二和第三开关。 从第二个开关到变量B的值类似地从MK的端口B获取,但没有移位操作,因为此开关的端子连接到MK的端口B的最低引脚,并且同向连接。 从第三个开关到变量C的信息以与第一个开关相同的方式删除。 此后,第二和第三开关(getBC = 1)被“关闭”,并且在变量t中计算出三个开关的设定值(十分之一分钟)。
while(1){ delay_ms(30); getAD=0; delay_ms(30); A=(~(PIND>>3)&15); delay_ms(30); getAD=1; getBC=0; delay_ms(30); B=(~PINB)&15; C=(~(PIND>>3)&15); delay_ms(30); getBC=1; t=100*A+10*B+C; } }
该变量与类似的实时变量i的比较发生在中断函数中。
interrupt [TIM1_COMPA] void timer1_compa_isr(void){ i+=1; if(i>=t){ RL=0; }else{ RL=1; } TCNT1H=0x00; TCNT1L=0x00; }
如果最后一个变量超过设定值,则“执行继电器”(RL = 0)将打开“ 0”。 此外,如果同时将开关设置为一个大于变量i的值,它将关闭。 在相同的中断功能中,变量i加1,计时器重置为0。
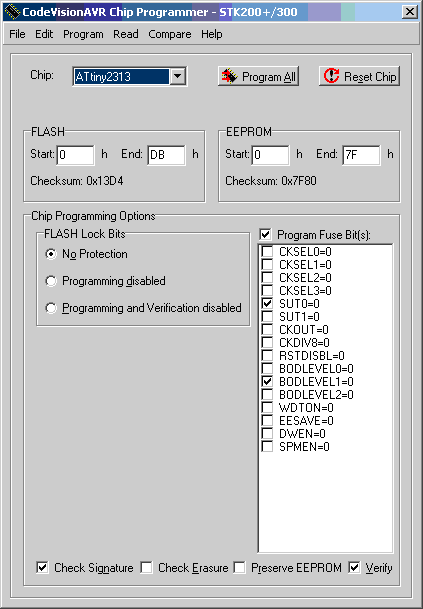
从MK上注销了FUSE位,并保持不变。 我分析了它们,那里一切都很好。
因此,不仅复制了设备图,而且还开发了MK程序,其功能与专有程序没有区别。 此外,在软件级别可以相当灵活地(最重要的是,免费)更改设备的时间参数,并在各种功能中使用控制输出(终端上的No.1)。 该程序非常简单,可以(甚至更好)用汇编器编写,但是我还没有做。