无人机具有很多功能:从拍摄报告和婚礼到监视森林区域以快速响应火灾,跟踪能源网络和输油管道的状态。 可以在室内使用可能飞行的机器人,但是为此,它们必须足够灵活且功能强大,可以与环境互动。 为此,日本专家创造了一种类似于飞行触手的DRAGON模块化机器人,该机器人会改变形状以穿透小孔,并在将来充当操纵器。
在救援行动中,机器人可能需要穿透门,然后克服许多其他危险障碍-避免撞到墙壁,壁橱,榕树或人身。 为了解决此问题,您可以制作一个非常小的机器人,该机器人可以飞入任何插槽。 但这仅适合观察。 您可以为无人机配备保护框架-但如此笨重的无人机将无法与环境很好地交互,也就是说,它再次只会帮助搜索操作。 理想情况下,机器人应该既小又灵巧,但又足够强大。
东京大学机器人学院的
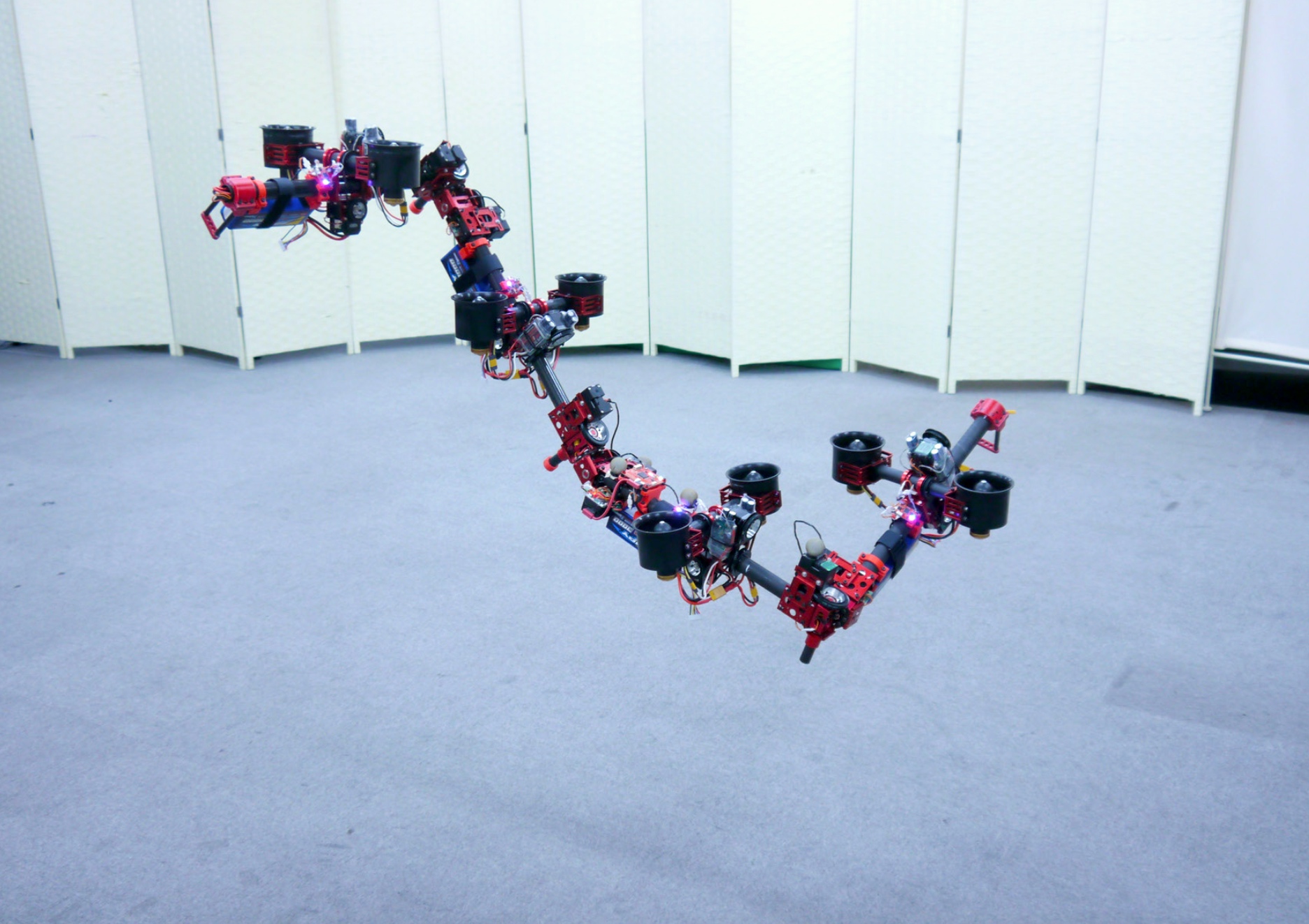
JSK实验室创建了DRAGON机器人,该机器人代表具有多自由度空中转换能力的双转子嵌入式多链接机器人。 模块化设备可以动态改变形状-它可以从方形直升飞机变成细蛇形,从而使其能够穿透狭窄的通道或采用其他形状。
DRAGON由模块组成,每个模块在环形罩中都装有一对风扇。 风扇改变位置,导致模块朝不同方向移动,从而使机器人可以几乎任何允许其自由度的形式飞行。 模块通过旋转支架连接。 该设备在紧凑型
Intel Euclid计算机的基础上运行。 电池可持续飞行三分钟,科学家必须努力改善这一指标。 可以假定该设备将通过电缆进行记录,但是在这种情况下,它将失去可操作性,或者将找到其他独立的电源。
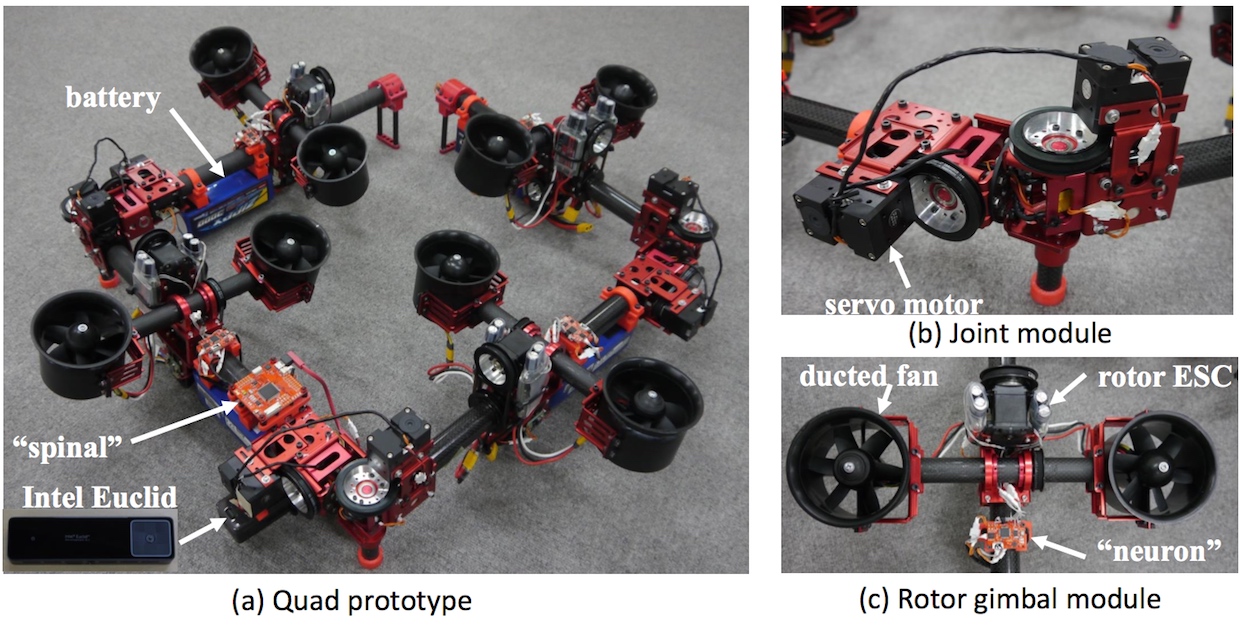
四个模块的原型,总共装有八个风扇。 开发人员的任务之一是设计软件,使机器人可以独立决定在特定情况下采用哪种形式。 在视频中,开发人员演示了蛇形机器人如何飞过一个小的“舱口盖”。
将来,该机器人将由十二个模块组成,并且同时能够使用极限模块作为两指握把来提起物体。 可以假设这样的机器人可以包裹物体以转移它,或者以其他方式与其周围环境相互作用。
飞行机器人用于救援和监视操作。 在开阔的空间中,直升机可能会
淹没救生圈 ,
将除颤器运送给人,监视正在发生的事情以发现失踪人员并在紧急情况下监视地形以快速响应。 对于封闭空间,有蛇形机器人的原型-例如,
斯坦福大学研究人员的软机器人可以调整大小,拉伸,弯曲和抓取物体,上升到很高的高度,可以爬入很小的狭槽,或者例如在最多100个的盒子下面公斤举起它。 软壳甚至穿过钉子之类的尖锐物体并改变形状-泵将空气泵入外壳。
东北大学的日本开发人员设计了一种8米长的
设备来搜索地震中的人员。 机器人以每秒10厘米的速度移动,“手指”刚毛表面。
在福岛核电站的
灾难后果清理期间,使用了该机器人的早期版本,但该机器人主要向一个方向移动。 事实证明,新机器人更具移动性。
已经尝试结合飞行和蛇形机器人。 来自宾夕法尼亚大学科学家的
直升机在现场提供了两个蛇形机器人,它们可以爬上楼梯或穿透裂缝。
JSK Lab的原型将结合飞行机器人与蛇形机器人的优势,并且将与物体进行各种交互,而不仅仅是进行观察。 JSK实验室的一名员工将DRAGON描述为“结构设计方面的突破”和“空气操纵器的理想平台”。