在上
一篇文章中,我们讨论了Sberbank感兴趣的智能机器人项目。 今天,我们将分析协作机器人:历史,分类,如何获得或使用它们来解决问题。
 资料来源:通用机器人
资料来源:通用机器人第1部分。什么是cobot
仅仅要求您的机器人协作是不够的。 它必须满足国际标准的要求,主要标准是
ISO / TS 15066:2016 (美国模拟
ANSI / RIA TR R15.606:2016 )。 虽然说这不是标准而是技术规范会更正确。 区别在于:ISO有时会在发布最终官方标准之前制定技术规范。 这是对以下事实的认可:协作机器人的当前状态是动态的,并且会随着时间的推移而发展。
需要技术规范的格式来固定“现在和现在”的状态,以便社区可以工作,并且知道将来会发生变化。
根据ISO的
说法 ,
协作机器人 (
协作机器人的缩写)是设计用于在特定关节空间内与人直接互动的机器人。
协作机器人
可以用于协作(
ISO 10218 )。
协作是指特殊设计的机器人系统和操作员在联合工作区域的框架内工作的状态。
联合空间 -受保护的工作空间,机器人和人可以在制造过程中同时执行任务。
您最可能有疑问:
- 如果我从传统的工业机器人上卸下防护栅栏,该机器人会变得协作吗? 没有啦
- 如果我限制机械手的力量和力量,机器人会变得协作吗? 不 ,因为 锋利的物体,即使用很小的力也可能对人造成伤害
- 如果机器人是协作的,这是否意味着我不需要进行风险评估? 风险评估需要完成。
简而言之,这是一种机器人,它可以在不伤害他人的情况下与人在共同的空间中执行任务,也就是说,
在协作机器人的工作区域中找到人是绝对安全的 。 合作机器人与通常的工业机器人的区别:
- 它们中的许多都比通常的工业机器人便宜:2.4万美元而不是40+美元;
- 更易于安装和配置(机器人重约30公斤,您只需要一个220v插座,有一个GUI);
- 它很灵活,很容易更改(直观的编程界面,对于人类和环境来说都不安全。
以前,保护人员的方法包括通过物理保护设备(例如牢房)将人员与机器人设备隔离。

 Pixabay上的Controleng.com
Pixabay上的Controleng.com随着协作式机器人系统的出现,这种模式已经发生了变化:现在您可以一起工作。

 www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-free-free为什么这么好?
www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-free-free为什么这么好? 因为我们获得了机器人(执行常规操作时的高速度和准确性)和人(创造性思维,在非标准情况下工作)的优势的协同作用。 这提高了工业生产率,这意味着它对整个经济产生了积极影响。
ISO / TS 15066:2016是世界上第一个针对协作机器人的安全要求规范。 该文件由一个委员会(包括来自24个国家和领先的制造公司的专家)自2010年以来制定。 它旨在补充ISO 10218-1和ISO 10218-2(“工业机器人的安全要求”)中描述的工业机器人的联合操作的要求和建议,ISO / TS 15066定义了工业机器人系统和工作机器人的联合操作的安全要求。星期三 该文档为当人们和机器人一起工作时进行风险评估的人员提供了指导。
根据ISO / TS 15066,有4种协作形式:- 受控停止(安全等级受监控的停止) ;
- 手动引导 ;
- 速度和分离监控 ;
- 功率和力限制
让我们更详细地考虑它们。
安全等级监控停止当机器人主要自己行动时使用此表格,但有时需要一个人进入工作区。 例如,机器人处理一个工件,但是在工艺过程的中间,必须由人执行机器人无法执行的操作。 如果有人进入预定的安全区域,则机器人将停止移动。 同时,引擎上的动力不会消失-它们会暂停。 这是非常重要的一点,因为有人离开安全区后,机器人将立即恢复工作。 这样就不会像完全停止机器人那样浪费时间完全重启工作程序。 如果人们不断地通过机器人,他将根本没有时间工作。
- 在不损失发动机功率的情况下提供了停止功能(暂停,不停止)。
- 操作员可以与机器人互动。
- 当人员离开工作区时,自动工作可以恢复。
- 在某个时刻,人或机器人都可以移动。
- 它可以与普通的工业机器人一起使用,但是您需要添加光安全屏障(激光测距仪,光电探测器)。
手动指导这种协作形式用于对重物进行精确操作(例如,安装车门)。 这种形式可以用于普通的工业机器人,但是可以使用附加的设备“感知”工人施加在机械手上的力,这通常是机器人法兰上的扭矩传感器。
- 操作员直接与机器人接触。
- 机器人处于手动控制之下。
- 人和机器人都可以同时移动(运动由人控制)。
- 可以使用普通的工业机器人。
- 需要其他设备(扭矩传感器)。
速度和分离监控在这里,与第一种协作形式一样,机器人的环境由光线安全屏障控制,该屏障可跟踪人员的位置。 不同之处在于场景:如果在第一种形式中,机器人的主要任务是停止,那么这里是人与机器人的同时工作。 机器人的行为将取决于其控制程序中预先配置的区域:当有人接近时,机器人会降低其运动速度,并且如果有人靠近时不可避免发生碰撞,则会发生停止。 随着人向远处移动,机器人将恢复工作并加速。

- 机器人的速度随着人的接近而降低。
- 与人发生碰撞时机器人会停止。
- 人和机器人可以同时移动。
- 它可以与普通的工业机器人一起使用,但是您需要添加光安全屏障(激光测距仪,光电探测器)。
- 用于需要人员经常在场的操作。
图片:Roberta Nelson Shea-“ ISO / TS 15066简介”上面提到的所有三种协作形式都可以与常规工业机器人一起使用,这取决于附加设备的可用性。 这种解决方案称为
协作机器人系统 。
协作机器人之间的区别在于,它可能不使用其他(外部)安全设备-它们已经内置在其中。 协作机器人系统与协作机器人之间的另一个重要区别是,在一起工作时,不与人接触。 但是,协作机器人可以与人体接触而不会对人体造成伤害。 这是通过限制力量和精力来实现的。
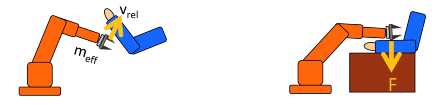
功率和力限制代表协作机器人的大多数人都表示使用这种特定形式的协作的机器人。 因此,我们将对其进行更详细的考虑。
机器人的“关节”中有可以确定与人碰撞的事实的扭矩传感器。 如果传感器检测到超出允许的力,则机器人将停止。 这些机器人还设计为在发生撞击时将力分散在宽广的表面上,这就是为什么其主体的细节通常采用圆形形状的原因。 通常,标准软件中包含限制功率和强度的功能。
- 控制机器人的力量和力量,以便机器人与操作员之间的意外接触不会造成伤害。
- 人和机器人可以同时移动。
- 可能的降低风险措施:
-机器人设计因素(例如,圆形,可延展材料);
-机器人单元的应用和设计的合适选择(例如,抓取,工件,轨迹等)。
PFL中的接触可以有两种类型: 瞬态(瞬态)和准静态 (准静态) 。
| 过渡接触
| 准静态
联系方式
|
内容描述
| 接触事件“短”(<50毫秒)。
人体的一部分通常可以反弹。
| 联系时间可能很长。
可以捕获人体的一部分。
|
限制标准(需要管理的内容)
| 冲力,压力,电压。
能量转移,比功率。
| 峰值力,压力,电压
|
设计/控制中的辅助功能
| 机器人位置,有效载荷。
速度(相对)。
接触面积,持续时间。
| 强度(连杆扭矩,位置)。
接触面积,持续时间。
|
 图片:Bjoern Matthias-“协作机器人的力量和力量限制”降低风险的措施
图片:Bjoern Matthias-“协作机器人的力量和力量限制”降低风险的措施 | 过渡接触
| 准静态接触
|
建筑施工
| 减少有效体重。
接触面积增加。
延长联系时间。
| 接触面积增加。
|
管理学
| 相对速度降低。
通过选择合适的位置来减少有效质量。
| 降低最大扭矩和功率。
减少联系时间。
|
最终配置是安全性和性能之间的平衡。ISO / TS 15066技术规范包括由美因茨大学开发的疼痛阈值研究表,该表提供了用于设计机器人动作的强度和压力水平的列表(已研究了29个疼痛点处100人的疼痛阈值)。


 资料来源:ISO / TS 15066:2016,图 4,图A.1
资料来源:ISO / TS 15066:2016,图 4,图A.1 资料来源:ISO / TS 15066:2016。资料来源:R。Nelson Shea,NRSC 2016演讲。 经许可使用切记:安全就是没有受伤。
资料来源:ISO / TS 15066:2016。资料来源:R。Nelson Shea,NRSC 2016演讲。 经许可使用切记:安全就是没有受伤。第2部分。协作机器人的历史
第一个协作机器人是由美国西北大学的
J. Edward Colgate和
Michael Peshkin于1996
年开发的 。 相比之下,此时传统的工业机器人已经生产了30多年。 但是,“ cobot”一词是由同一所大学的另一个人-Brent Gillespie争夺最佳名字而创造的。 《华尔街日报》非常喜欢这个词,以至于他们把它列入了
明天的
词,并给出了50美元的奖金。
第一个合作机器人专利于1996年2月在美国提交(
US 5,923,129 ),并在1997年10月使用了术语“合作机器人”(
US 5,952,796 )。
可以在这里看到第一批合作机器人的照片西北大学合作机器人的开发得到了通用汽车公司和福特公司以及美国国家科学基金会的资助。 在同一个1996年,科学家创立了Cobotics公司(在2002年,它被斯坦利装配技术公司吸收)。
由于2005年公司Universal Robots(Denmark)的出现,协作机器人获得了当下的流行。 廉价,易于安装和操作(与工业机器人相比)机器人的想法于2003年问世。 在制造了多个原型之后,该公司于2008年发布了UR5机器人的第一个串行原型(迄今为止最受欢迎的),并获得了丹麦政府的投资。 2012年,该公司发布了第二台机器人(UR10),并在2015年以2.85亿美元的价格被美国Teradyne收购。
通用机器人(Universal Robots)成功之后,长期以来一直成功占领工业机器人市场的公司(FANUC,ABB,KUKA,BOSCH等)开始制造协作机器人,随后出现了类似的初创公司:
Rethink Robotics ,Doosan Robotics和Techman Robot。 在年轻项目中,还有来自独联体国家的移民-白俄罗斯创业公司Rozum Robotics。
第3部分。协作机器人在何处以及如何使用
世界上有多少个协作机器人? 尽管协作机器人越来越受欢迎,但它们仍未在年度世界机器人研究中的单独课程中单独列出,该研究采用了业界领先的数据源,即国际机器人联合会(IFR)。
目前,世界范围内使用了约200万台工业机器人(IFR预测2017年)。 他们中有多少人是协作的,目前尚不清楚。 巴克莱研究公司进行了一项评估,根据该评估,2017年有32,000台协作机器人投入运营,其中绝大部分是由
Universal Robots生产的。
几年前,协作机器人仅被认为是实验室设备,在生产中没有占有一席之地,但是灵活的配置和最小的集成成本使我们能够克服心理障碍。 现在,此类机器人已在轻工业,食品工业中使用,甚至在传统上被传统机器人占据的汽车工业中也使用。
巴克莱研究公司
估计 ,2017年
的市场规模为8亿美元,有证据表明,多达三分之一的协作机器人
在中国销售 。 IFR对2017年工业机器人市场的估值为131亿美元。
未来几年的预测:
IFR预测,到2020年工业机器人的总市场规模为232亿美元。如果将Barclays和IFR的估计值进行比较,我们将看到cobot的市场份额显着增加:从2017年的6.1%到2020年的13.5%-相当动态。
合作机器人可以做什么:- 取放:装卸传送带。
- 在机器中装卸工件。
- 零件的测试和分类:作为质量控制或其他需求的一部分,检查或分类传送带上的随机对象。
- 包装:将物品收集并放置在用于运输或存储的容器中。
- 易于组装:组装电子产品和家用电器。
- 精加工:去除零件中多余的塑料或金属。
Cobot在未来几年的增长动力:1. Cobots比普通的工业机器人便宜(〜$ 25,000而不是〜$ 50)->降低了中小企业的准入门槛。
2. Cobots易于设置:无需编程。 经过一天的培训,工人将能够配置机器人以执行中等复杂度的任务。
您可以自己尝试 。 也就是说,无需雇用服务工程师或系统集成商->中小企业的准入门槛再次降低。
3. Kobotov易于移动:它们比工业设备更容易使用,不需要笼子形式的本地基础结构->对中小型企业的吸引力正在增加,因为可以快速恢复生产。
4.由于人口老龄化和
健全人数量的减少 ,体力劳动的成本增加 (每小时工时率:德国40欧元,美国12欧元,美国11欧元,东欧11欧元,中国9欧元。合作机器人的成本为6美元/小时) 。
5.恢复先前因素的协同作用会导致美国和欧盟将生产从中国返还其祖国的事实。 这可以帮助降低运输成本并提高产品质量。
6.旨在实现生产自动化和机器人化的国家计划。 他们可以刺激和支持(包括在财务上)机器人的购买和使用:
-德国的“工业4.0”;
-中国《中国制造2025》;
-美国的“国家机器人技术倡议2.0”。
第4部分。谁生产协作机器人
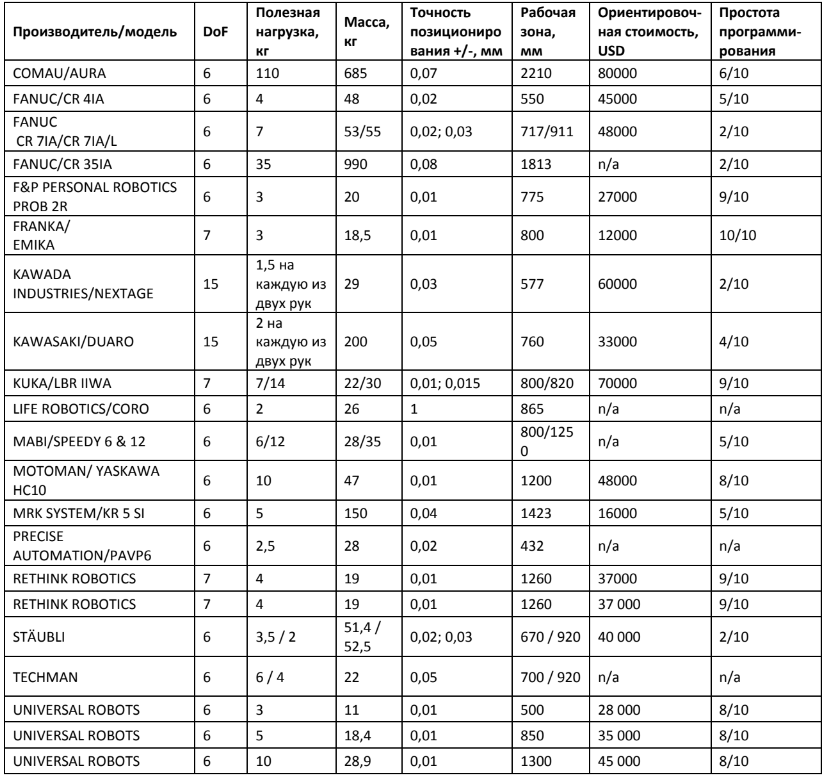 下载表
下载表第5部分。如何在协作机器人上赚钱以及如何使用它们来解决问题
如何在合作机器人上赚钱:
为了使用协作机器人来解决他们的问题,有必要确定潜在的自动化流程(任务)。 第一次自动化的理想选择是高度确定性(可预测)的重复性任务。
| 只是
自动化
| 辛苦
自动化
|
任务
| 毫不费力地沿着轨迹移动物体
或不断努力
| 力控制,例如抛光或精密组装
|
物品
| 少量物品(尺寸,重量,
材料),已知形式和普通形式(圆柱体,盒子)
| 各种各样的物品,复杂的形状,
易变形的物体
|
科目安排
| 物品均匀堆放:放在盒子,堆放或托盘上
| 物品被丢在箱子/篮子里或继续前进
快速输送机
|
与其他设备整合
| 使用人使用的接口:
按钮,笔
| 传感器的连接和配置,软件集成
带机床
|
程式设计
| 一连串的重复动作(无
条件和树木)
| 复杂的逻辑和许多条件取决于
来自传感器的信息
|
在这里,您可以计算机器人项目的ROI。本文使用了以下出版物的翻译:
该文本由Sberbank机器人实验室的Albert Efimov和Denis Zatyagov编写