在此视频中,波士顿动力的创始人马克·赖伯特(Marc Raibert)在这里谈论机器人:BigDog,Spot,SpotMini和Atlas。 根据这段视频以及Marc表演的其他视频,我将简要介绍机器人技术和公司的未来计划。
马克·雷伯特(Marc Raibert)25年前创立了波士顿动力(Boston Dynamics),但她尚未将机器人投入生产。 创始人用公司一直在努力以超越当前机器人技术能力的范围进行更快的开发这一事实来解释这一点。 尽管如此,在制造机器人时,该公司达到了一个新的水平,即可以制造出具有四个腿的小型电动机器人,该机器人能够在崎rough的地形和建筑物周围独立移动。 因此,他们将在2019年中期开始批量生产SpotMini机器人,每年生产1000件。
目前,潜在客户正在测试10个机器人,一年内还将交付另外100个机器人进行测试。
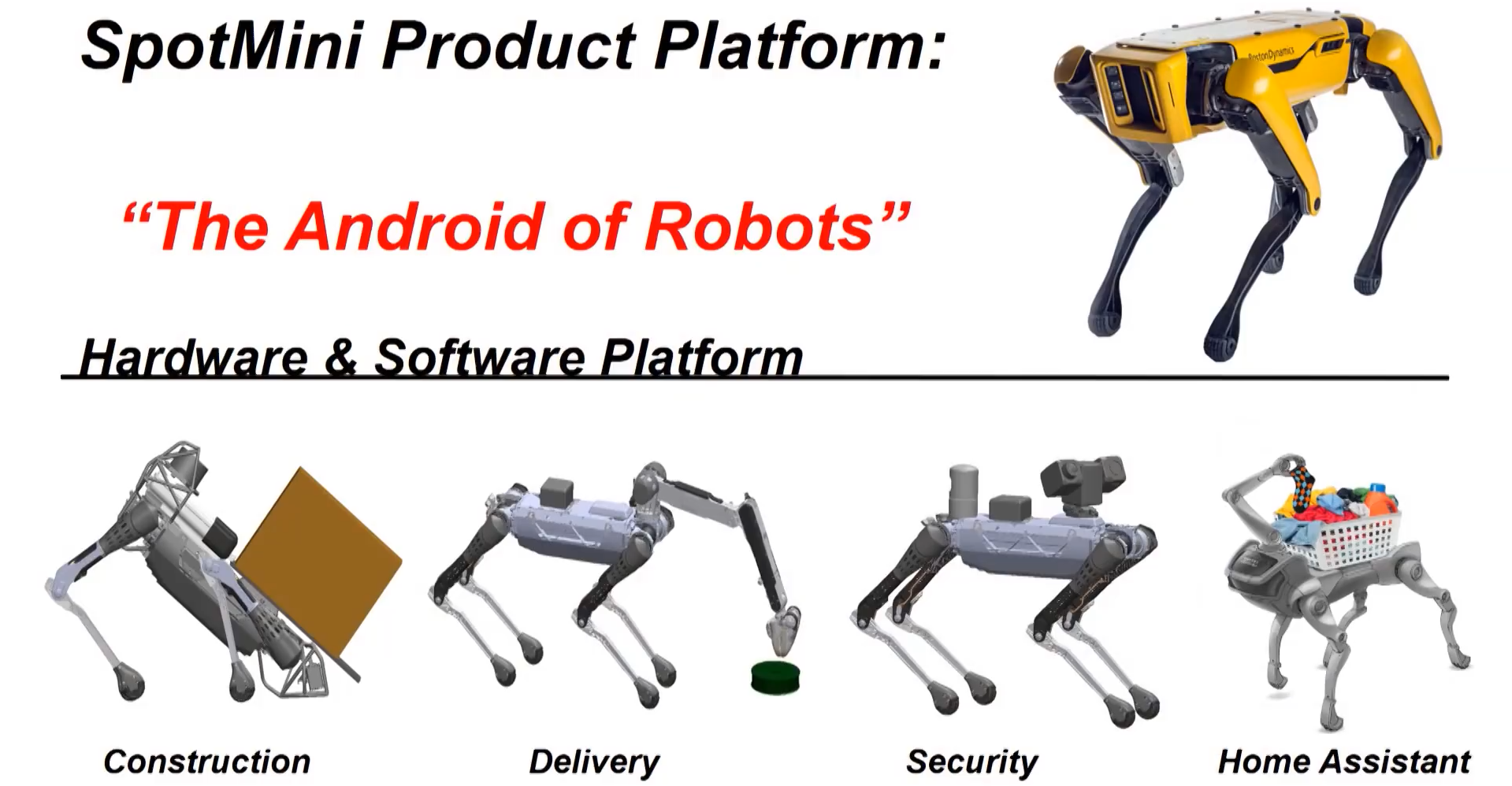
机器人将作为平台出售,您可以在上面安装手。 它具有一个API,第三方开发人员可以使用该API编写其应用程序并使用机器人的基本功能。 视频中有一些此类应用程序的演示。
据了解,Boston Dinamics已在机器人中奠定了基本功能,并且只有这样的高级别命令(如以这种速度去那里)可以传递给机器人操作员或第三方开发人员,并提交一罐可乐。
马克(Marc)声称,机器人可以在人旁边行动,并且本质上是协作的,他在视频中证明了这一点,因此机器人仅重27公斤,因此不会对人类造成伤害。

SpotMini可以检测一罐可乐,抓住它然后将其转移到另一个地方,或交给他人。 上面的照片只是执行此类任务的机器人的应用程序示例。
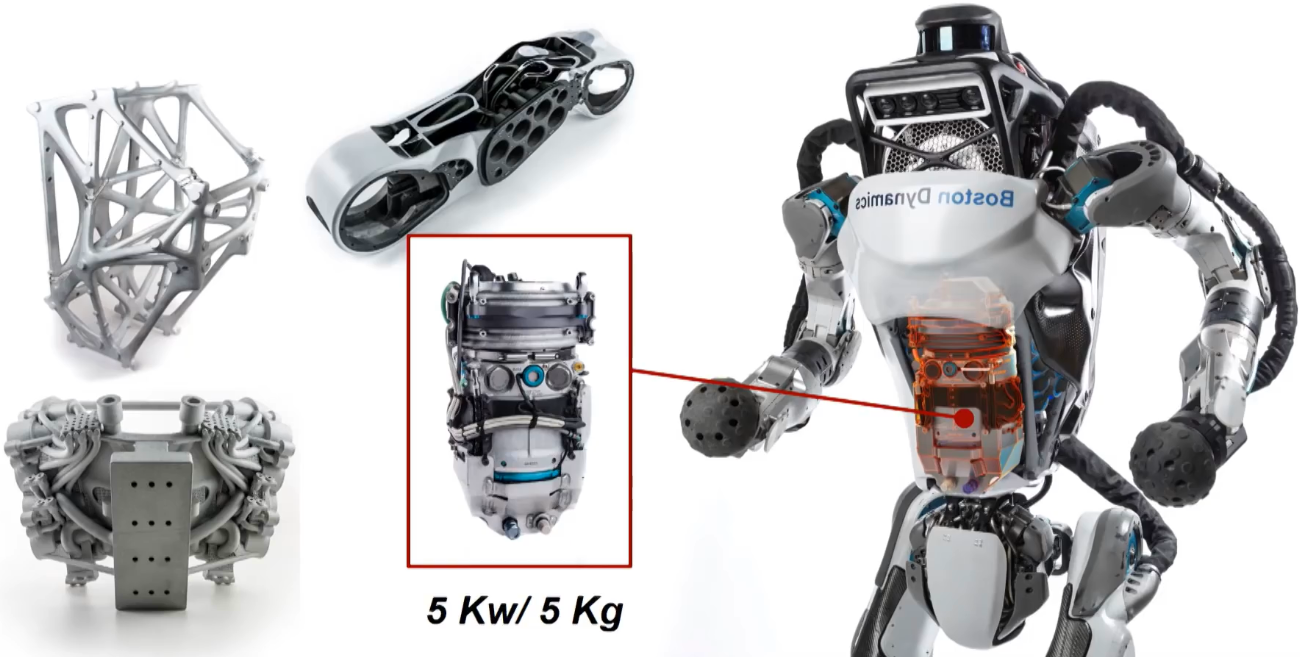
关于Atlas机器人中使用的技术的故事也很有趣。 在相同的功率比下,机器人的初始重量从170公斤减少到75公斤。 同时,机器人变得更加敏捷和强大。 这是由于采用了新的设计方法和3D打印而实现的。 该视频显示了在打印机上打印的机械臂,在相同的强度下,它的重量减轻了几倍。
特别值得一提的是电厂。 马克在视频中说,他们设法适应了它:一个发动机,一个泵,一个过滤器,一个歧管和一个带有加热装置的隔热套,在机器人的胃中装有电池,而整个结构的重量为5千克,功率为5千瓦。 他再次说,如果没有先进的设计技术和3D打印,这将是不可能的。


在另一个视频中,他谈到了Handle机器人,该机器人计划作为一种物流机器人,可以在很长的距离内快速承载货物,因为它没有脚,而是带有轮子。
我的一个小型逆向工程:在视频中,马克·赖伯特(Marc Raibert)说,该机器人使用5个摄像头模块,其中两个在前面,一个在左右,后方。 他们显然拒绝了商业版本的激光雷达。 照片显示相机模块某种程度上是非标准的,总共可以看到模块中的5个相机,其中可能有几个是带有接收器的红外相机。 还可以看到,这两个摄像机很小,看上去彼此成一定角度。 如果有人知道此模块是什么,请在注释中写。 从所有这些我们可以得出结论,机器人只能使用立体摄像机,可能只能使用红外深度摄像机。 定位和定位算法很可能是视觉SLAM,目前尚不清楚。 总体而言,波士顿Dinamics公司相当封闭,对其机器人软件的讨论不多,但是在论坛上工作的人写道,他们拥有自己的专有代码,主要是C ++和一点点Python。 提到了使用Drake。 也许在Atlas机器人中,ROS在比赛中被部分使用。
自从1980年创立脚部运动实验室并于1986年撰写《平衡腿的机器人》一书以来,马克·雷伯特就一直在进行力学和计算机器人肢体的运动方面的研究。 而且,从我在上一篇有关盲豹猎豹机器人的文章中描述的MIT研究中,我们可以得出结论,自从Marc Raibert担任MIT教授以来,SpotMini也使用了类似的方法。
实际上,这将是第一个日常使用的功能强大且复杂的机器人。 虽然他只能拿一罐可乐和女式皮包,但还会有:)