在Orangepi zero和arduino上用于收集高尔夫球的服务机器人的开发过程。 独立开发人员的所有痛苦,而无需在一篇博文中担负技术背景...
MVP开发。 测试视频。
什么是高尔夫?
高尔夫是一种体育运动。 主要目标是将球滚动到每个区域的洞中以减少击球次数,将所有区域传递到较少的击球中。 在我们国家,高尔夫发展极差,令人难过。 该游戏非常有趣,它使人们可以在户外度过时间,在游戏中进行交流,适合所有年龄段的人。 游戏可以清楚地衡量您的让分成功-运动员资格的数字指标。 所有这些因素使高尔夫成为一种流媒体活动。 如果您还没有尝试过高尔夫,那是时候了!

什么是练习场?
要从第一次到田野尽头,更靠近洞口,您必须能够进行长而准确的打击。 练习场是一个练习场,用于练习中长距离的高尔夫击球。 这些字段看起来像这样。

我在练习场上。 这说明了如何错误地进行打击。

在这样一个领域的一次培训中,他们通常会击中一百多个。 收集这些球的手既费力又危及生命。 在20世纪初,没有太多选择,但是现在在某些地方,体力劳动的价格降低了。

手动工具仍在使用,但这是例外。
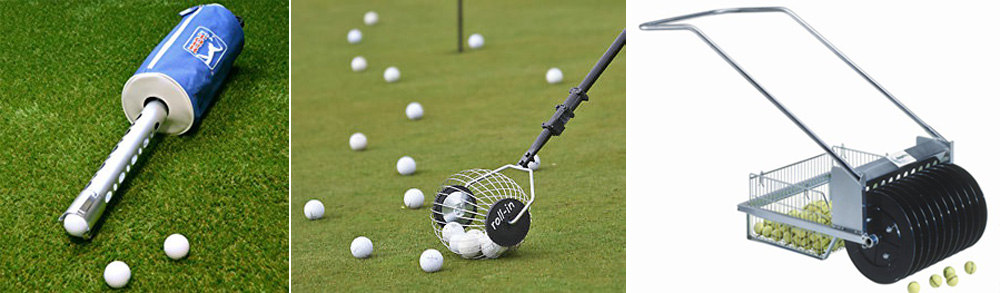
通常,使用特殊的挂钩在拖拉机,高尔夫球车或普通汽车上收集球。

为了收集球,将它们拖到洗衣机中,装到分配器中通常是特殊状态的人,尽管草场管理员也可以扮演这个角色。 (Graskipper是负责高尔夫球场草坪质量的人)。
从经济的角度来看,开发和实施用于收集高尔夫球的服务机器人似乎是一个合理的步骤,因为它可以节省专用设备的维护费用以及应执行此过程的员工的工资。 高尔夫在世界范围内得到发展,这张照片清楚地说明了这一点。
这款游戏在美国和欧洲尤为普遍,那里的薪水水平很高,并且能够用服务机器人替换员工的能力很快就会得到回报。
寻找解决方案
搜索结果:
几个DIY项目

几个漂亮的效果图
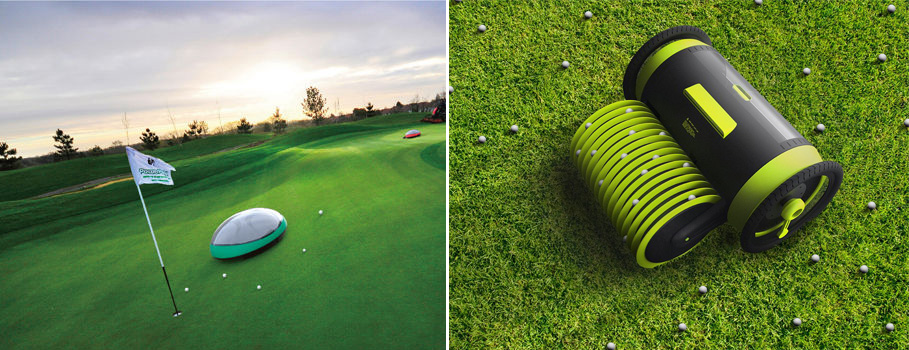
还有一个相当商业的项目

由此我们可以得出结论,有兴趣。 最有可能投资这种利基解决方案是非常冒险的。 开发和生产调整的成本很高,有些模具将花费数万美元。 俄罗斯有40多家高尔夫俱乐部,而世界上有很多,仅德国就有700多家,总共34,000多家。 捡球机器人作为产品肯定不会通过Good Corporation的牙刷测试。
令人奇怪的是,与我交谈过的几家欧洲高尔夫俱乐部的管理者虽然表现出兴趣,却没有听说现成机器人的存在。 我与该公司联系的所有尝试均未成功,也许他们无法应付现有订单的数量。
我不知道会发生什么。 从胶合板盒子到第一个“成人”样品的途中,也许有人会知道是否有人需要它。
最初的目标是在不关注外观的情况下获得工作样品。 接下来,我打算给机器人一个整洁的外观,并将其放在俄罗斯的一家高尔夫俱乐部中进行测试。 调试并进行长期测试后,将模型加工成适合生产的模型。
走吧
相对于现有的商业解决方案,计划了几个关键的好处。
- 无需在外围缠绕低电流电缆。
- 在现有基础架构中实施的可能性。
- 降低成本和总拥有成本。
外壳和机械零件
用于第一样品的主体的材料是胶合板。 价格便宜,可让您快速修剪某些零件或钻孔。 为了清楚地调整所有内容,我绘制了草图,然后进行了铣削。

收集了所有细节。 从一开始就有一个使身体变圆的想法,但决定严格停止MVP。 任何不影响性能的内容都将有意排除在待办事项列表中。

在这些设备的演变过程中捕获球的机制已显示出其有效性,因此,未考虑其他选择。
发动机12V 30 N / m。 在每个轮子上。 相同的发动机通过夹持盘使轴旋转,因为它们被提升到表面上方以进行转弯投资并提高了可操纵性。

最初,这些引擎是没有名字的中文。 描述中没有任何时间,因此风险很大。 时机显然还不够,不能说窗户上的引擎。
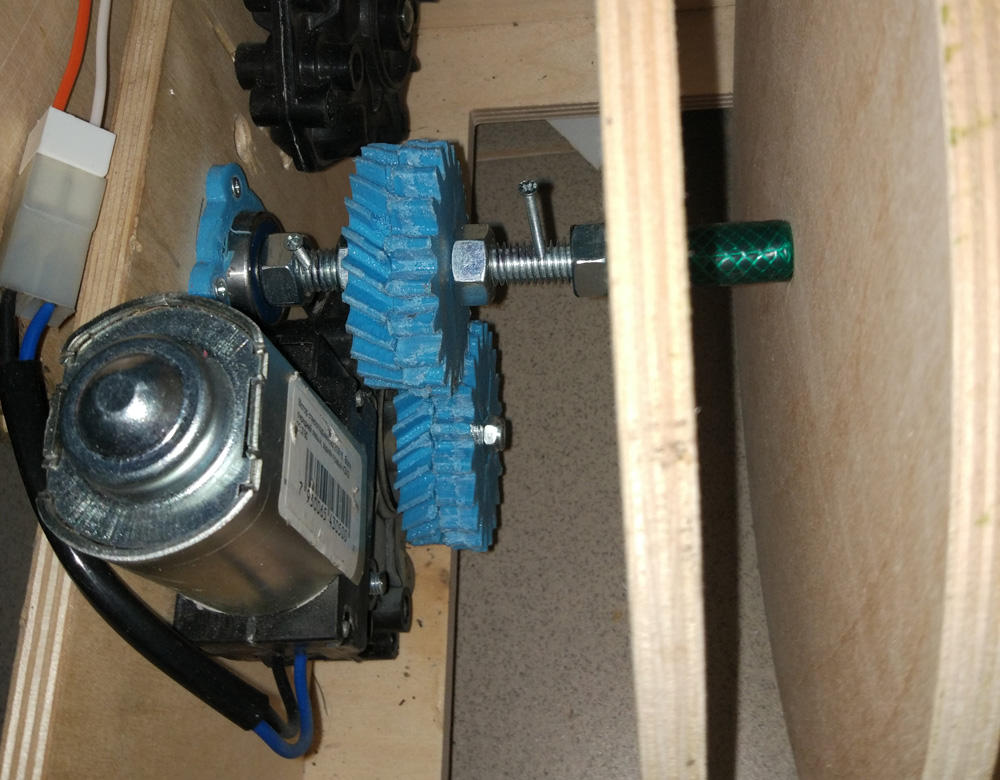
更换发动机后,必须打印其他齿轮。
电子产品
由于流动站应该在没有电磁场沿线的情况下工作,因此它需要以某种方式导航并寻找用于落球和充电的底座。
我决定使用Orangepi lite和arduino在5v上进行更方便的工作,而每个传感器和引擎驱动程序都没有动物园级转换器。
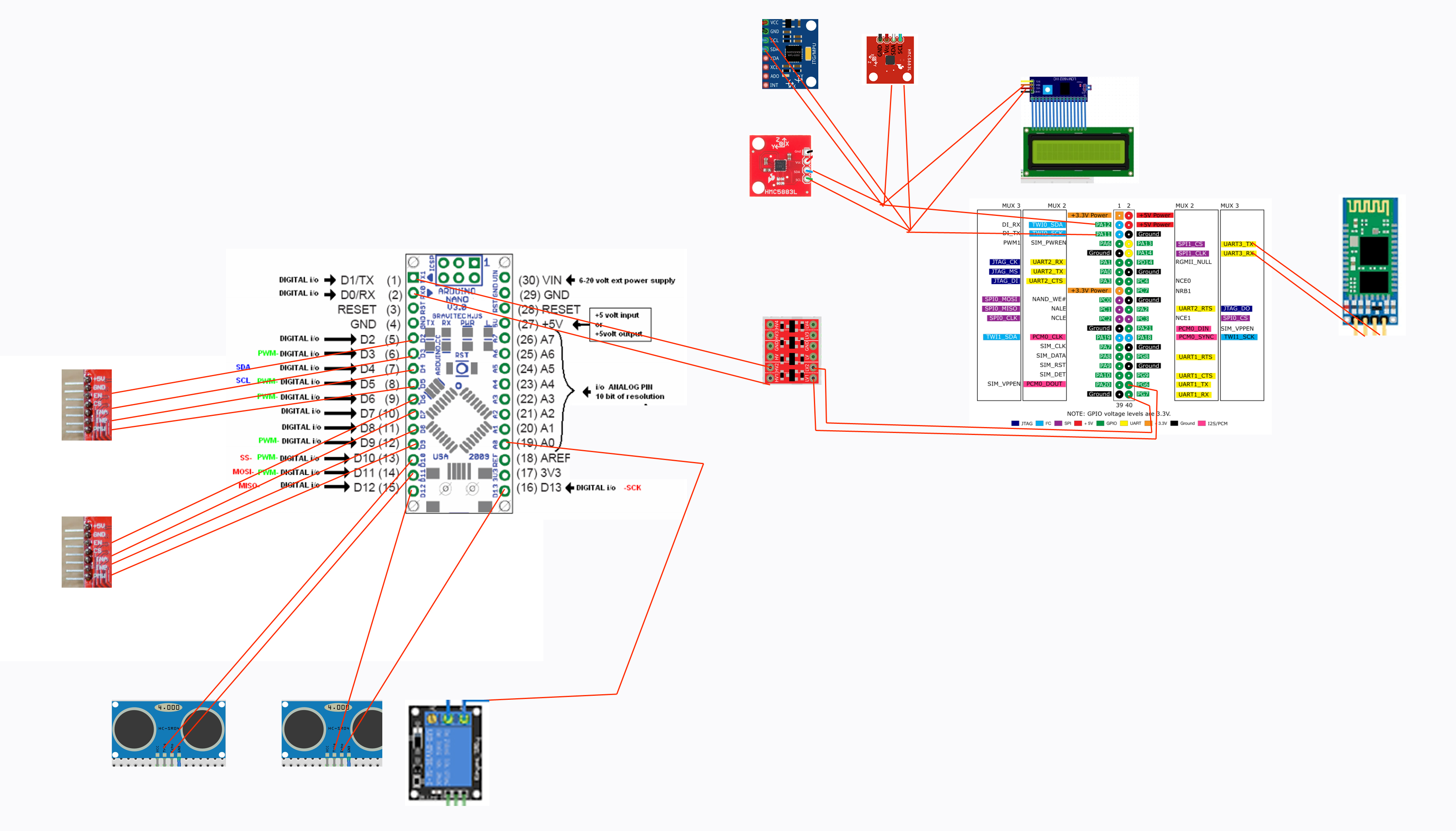
将所有完成的模块组装到面包板上。 这会影响电路经验的缺乏,我认为将来将模块或离散元件的板分开并定购将不再是问题。

该计划包括11个计划,其中11个是Karl!
-Orange Pi Lite
-Arduino纳米
-GPS模块GY-NEO6MV2
-2个VNH2SP30引擎驱动程序
-蓝牙Hc-06
-2个超声波模块J34
-逻辑电平转换器
-模块3轴陀螺仪和加速度计GY-521 MPU-6050
-两个继电器块
当然,这样做是为了快速组装,安装和更换模块。
软件部分
主要脚本是用Python编写的。 计划周期中有一个全球目标:
- 初始化
- 收集球
- 返回基地
- 充电中
- 预定假期
- 视天气情况而定。
初始化
在初始化期间,测试系统,搜索GPS,构建本地越野地图并确定进一步的目标。
收集球
在每个周期的球收集过程中,更新局部通畅图,将矢量绘制到当前的地理目标,用球对过度拥挤的传感器进行轮询,对电池进行轮询。
返回基地
万一由于剑或车电池耗尽而导致车厢溢出,机器人会将全局目标切换为以最短路径返回基地。 在接近于基本坐标的情况下,对标记进行视觉搜索,沿着该搜索进一步发生更精确的定向。
充电,休息
进行充电直到所需的电池电压。 可以按计划安排休息时间,也可以通过触发降雨传感器来安排休息时间。
房屋

非常感谢
habr.com/users/NikitaKhvoryk的设计
支撑体必须从上方用上部覆盖,以防雨淋和掉落球。 我计划用玻璃纤维和环氧树脂制成的第一个装饰盒。 如果有意思的话,我准备写一篇单独的文章。

录影带
计划
流浪者已经收集了其路径中95-100%的目标。 使用GPS坐标在多边形内构建路线。 计划:
- 寻找放下球并在视觉标记上充电的基础。
- 伺服球复位。
- 气球溢出传感器。
- WEB界面,用于直观指示地图上的点,构建用于收集不同间隔球的区域。
- 身体。
- 将机器人放置在莫斯科的一家高尔夫俱乐部中以进行战斗条件测试。
问题
帖子发布后,我收到了来自habro社区的很多次回答,对问题或建议的帮助很大。 在整个帖子中,我确实需要回答几个问题。 为了方便起见,我决定将它们放在一起。
- 如何为机器人制作身体? 它应该看起来很漂亮,无需模具投资。
- 离开模块并在一块板上完成所有操作是否值得? 用微型计算机做什么?
- 如何为项目寻找资金? 在哪里测试样品?
- 我只是找不到通过磁力计,陀螺仪校正GPS数据的卡尔曼滤波器的示例。 有Pycalman,但我不明白如何将传感器中的数据拟合到矩阵中。 即使在烤面包机上也找不到答案。 我将不胜感激。
谢谢您的关注。 在下一篇文章中,对战斗条件进行测试。 我将向您展示未显示的内容,我将尝试解决未解决的问题,并找出所有未知的内容!
永远是您自己,初学者的创业者,
中间环节的
经理,各种机器人
1、2、3、4、5、6和小工具
1、2、3的开发人员 。 我写了两个故事
1、2 ,并接受了几次采访
1、2、3 。
我愿意接受对话,咨询,帮助,建议。