自成立以来,我们周围的世界一直在按照自然科学的规律开展工作。 实际上,我们可以依靠这些定律来解释任何现象。 现在我们已经知道,闪电不是宙斯的愤怒,海啸不是海王星的蛇,地球不是平坦的,拥有整个世界的巨大乌龟不存在。 的确,我们种族中一些特别固执的代表仍然相信最新的言论。 但是今天我们将讨论关于量子力学的科学,它喜欢颠倒一切。
更确切地说,关于一项实验性地证明我们并不总是具有某种事物的单一状态这一事实。 运用量子力学的知识,科学家们能够在量子开关中实现不确定的因果顺序。 我们从他们的报告中学到了什么以及它如何工作。 走吧
学习基础因果关系是一种非常熟悉且可以理解的现象。 通常,我们知道某种行动会导致某种结果。 当然,有时可能会有不同的事件发展方式,但总是选择一种。 因此,例如,我们可以在盆中种下种子,然后花朵会长成或不长成。 他不能两者都做。 值得回忆的是精彩的理论实验“薛定ding猫”。
为了不讲故事,该实验的描述隐藏在扰流板下面:
Schrödinger本人对该理论实验进行了详尽的描述,并且在一定程度上是困难的。 简化的版本是:
有一个钢箱。 盒子里有只猫和一只机制。 该机制是带有非常少量放射性物质的盖革计数器。 这种物质是如此之小,以至于在1小时内1个原子会衰变(或可能不会衰变)。 如果发生这种情况,则读表管放电,继电器跳闸,释放出悬挂在毒药灯泡上方的锤子。 烧瓶破裂,毒药杀死猫。
现在一个解释。 我们看不到盒子里正在发生的事情;即使通过观察,我们也无法影响该过程。 在打开盒子之前,我们不知道猫是活的还是死的。 因此,夸张地说,对于我们来说,盒子里的猫同时处于两种状态:他活着并且死了。
一个非常有趣的实验,推动了量子物理学的发展。
维格纳的悖论甚至可以被认为是不寻常的。 在上述所有实验变量中,添加了一些实验室助理朋友来进行此实验。 当他打开盒子并找到猫的确切状态时,他的朋友(位于不同的地方)不知道该状态。 第一个应该告诉第二个,猫是活着还是死了。 因此,直到宇宙中的每个人都知道这只可怜动物的确切状态之前,它都会被同时视为已死亡和存活。
为了研究不确定的因果顺序,使用一个框架来确定任何实验情况(以下称为过程)是否涉及固定的因果过程。 来自不确定因果顺序的过程的一个示例是量子开关,其中在目标系统上执行
黑匣子*操作,而开关本身由控制量子系统相干地控制。
黑匣子* -在这种情况下,这是未知的操作名称。
根据科学家的说法,量子开关的主要优势在于它无法使用常规的量子电路来实现,而传统的量子电路使用了相同数量的黑匣子操作。
现在,科学家们立即想到的问题是:是否有可能在实验室条件下实现这种量子开关? 事实是,目前,由于使用了额外的“黑匣子”,因此这种技术的实现并未利用量子开关。 在这种实现方式中,顺序由光子选择的路径控制,而每个“黑匣子”(在这种情况下为波片)根据其极化而起作用。 即,光子根据顺序穿过空间中两个不同点的波片。 另外,还有一个负数(更确切地说是限制)-在这种实现方式中,光子相干长度比两个波片之间的距离短得多。 这意味着操作也可能在时间上有所不同,因为其中一些操作可以通过控制波片更快地执行。
科学家们清楚地意识到,上述实施存在许多局限性。 这就是为什么他们专注于可以克服这些限制的量子开关的原因。
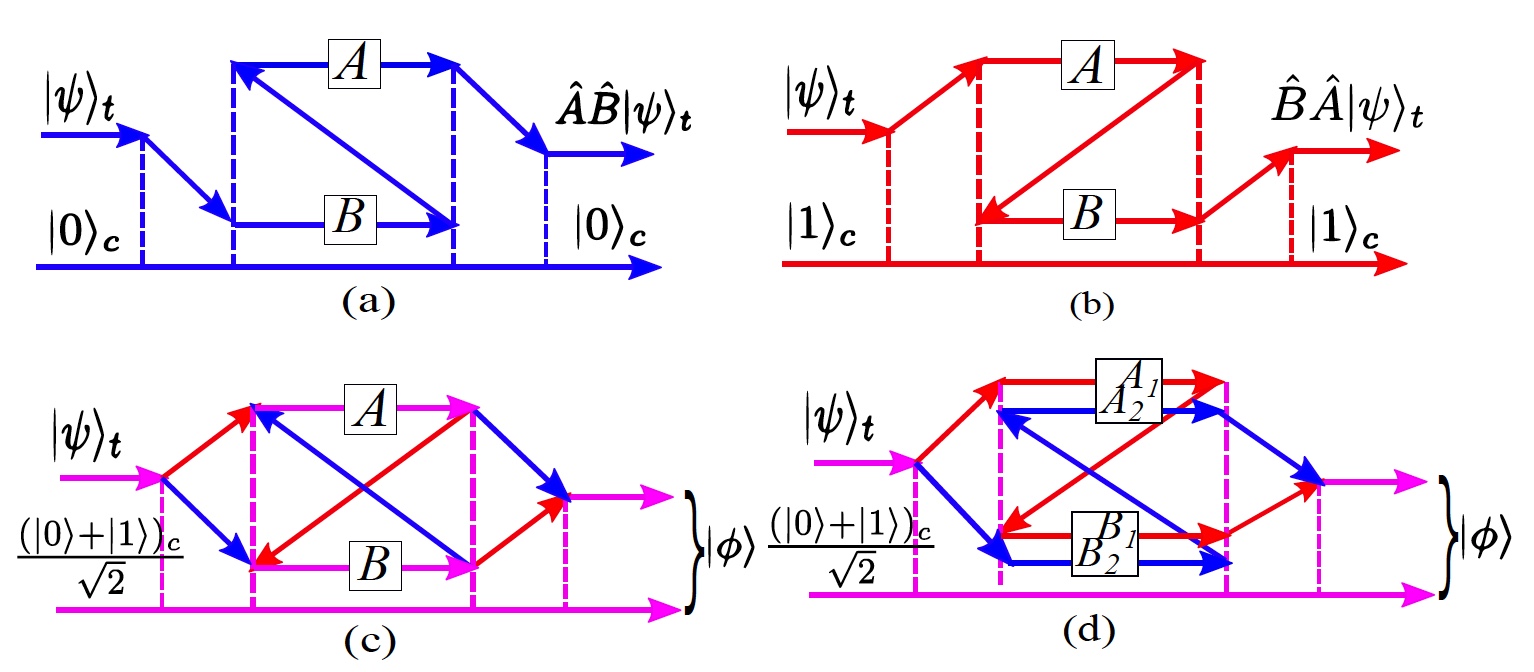 图片1:量子开关。
图片1:量子开关。图像№1显示了一个量子开关的操作方案,其中控制量子位负责一定的顺序,其中针对目标量子位
|ψ⟩t执行两个量子操作A和B。
1a-当控制量子位处于
|0⟩s状态时,结果是我们具有AB形式的运算;
1b-当控制量子位处于状态
| 1 s s时 ,结果为操作IA;
1-如果控制量子位处于量子叠加1 /√2(|0⟩+ |1⟩)
s的状态,则运算的顺序也变为量子叠加。 结果,输出端的控制系统和目标系统的一般状态如下:
 1d-
1d-目标量子比特
|ψ⟩t以偏振自由度编码,而|0⟩和|1⟩是通过波片的不同光子路径。 这些路径执行操作A和B。由于光子在两个不同的点穿过波片,所以我们得到4种不同的操作:A1,A2和B1,B2。
值得注意的是,在实施量子开关时,科学家仅使用了两次“黑匣子”操作,每个操作仅使用了一次。 在实验系统中,控制量子位以极化方式编码,目标量子位以光子的横向空间模式编码。
研究人员说,他们对量子开关的兴趣源于对实现量子类型的因果排序的渴望,这是以前没有人做过的。
鉴于此,在本研究中,
因果关系被定义为
事件之间传递信号的能力。 事件是指更改,准备或转换物理系统的操作。 例如,科学家列举了一个穿过多个透镜的光子。 该光子定义一个事件。
因果结构是几个事件之间可能因果关系的网络。
整理好“本地”术语后,现在就可以开始了。 首先,考虑相对论因果系统。 如果事件A相对于事件B是过去的,则我们可以将信号从A发送到B。如果事件在空间上是分隔开的(在空间上彼此间隔很远),则无法进行信号交换。
在这里有必要弄清楚什么是“空间分离”,并用与之相关的其他概念来补充这一概念。
想象两个独立的事件:A和B。如果速度足够快,您可以同时看到A和B。这是暂时的分离。 如果事件相距甚远,那么为了看到你们两个,您必须以光速移动,这就是光分离。 如果事件A和事件B距离更远,那么当您甚至都看不到两者都以光速运动时,这就是空间上的分隔。 这是一个粗略的解释。
正如我们在上图中所看到的,有两个操作A和B。实际上,有三个操作,还有一个操作C。有关每个操作的更多信息。
A和
B是沿干涉仪的两个臂在目标系统上执行的操作。 但是,
C已经是控制系统的测量值,它是在事件A和事件B都发生之后进行的。 所有这三个事件必须由量子开关识别。
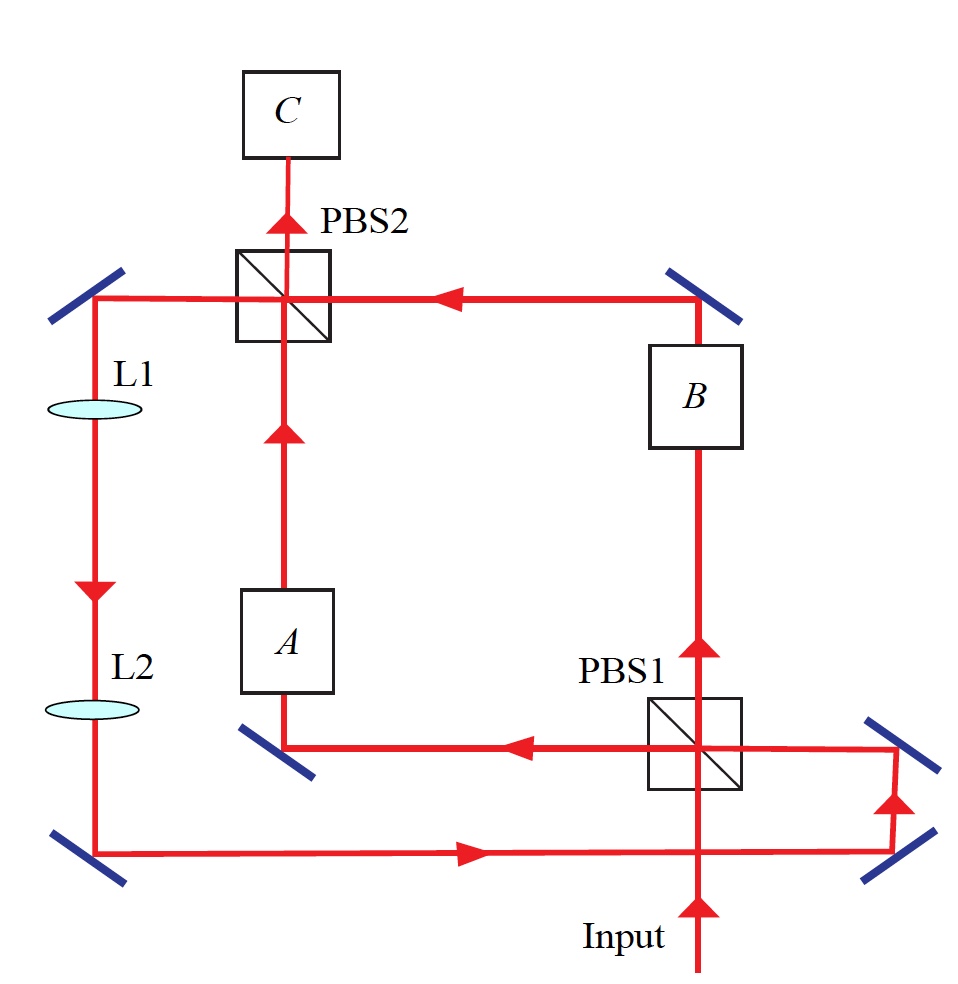 实验方案。
实验方案。现在考虑进行实验的方案。 众所周知,控制量子位由偏振确定,因此有两个偏振光束分离器
-PBS1和
PBS2 。 PBS1将光子指向事件A或B,它们在光子的空间模式上执行相应的操作A和B。 事件C由描述光子
的Stokes *参数的偏振测量表示。 为了确保模式匹配,使用了镜头(图中的
L1和
L2 )。
斯托克斯参数* -一组描述电磁波极化矢量的量。
使用具有低阶横向模式(HG
00 )的波长为795 nm的100 kHz激光束作为辐射源。 接下来,通过使光束通过将π相加至光束一半的元件,将激光束转换为HG
10厄米-高斯模式。 结果是空间模式,该空间模式是埃尔米特-高斯模式的叠加。 此外,傅里叶滤波用于去除大多数高阶空间模式。 因此,目标系统的量子位空间由一阶空间模式(|0⟩= | HG10⟩; |1⟩= | HG01⟩)组成。 目标量子比特的初始值|ψ⟩t为|0⟩。
因此,通过偏振分离器PBS1,光束被分成干涉仪的两个臂(上图)。 此处,两个单一操作A和B在横向空间模式下操作,尽管在理想条件下它们不应改变光束的偏振。 上下臂在输出分离器PBS2处连接。 生成的mod发送回PBS1。 镜头确保模式匹配,也就是说,重新进入干涉仪的模式必须与原始模式匹配。
 执行操作A和B的方案。
执行操作A和B的方案。棱镜(
R )旋转进入的横向模式。 一次,柱面透镜(
C )导致入射光子的Hermitian-Gaussian分量发生π/ 2相移。 需要球面透镜(
L )来实现mod匹配。 棱镜中的反射会导致偏振畸变。 为了补偿这些变化,使用了半波板(
H )和四分之一波板(
Q )。 φ是相位板。 为了进行必要的操作,需要调整倾斜角度
θ1和
θ2 。 例如,要将HG
10光束转换为HG
01,必须将光束R(θ1)旋转45度,并将角度R(θ2)设置为0。
在实验中,科学家确定了两种可能的误差来源:模式不匹配和倾斜角设置不正确。
所谓的“因果证人”,即表明事件A和B对应于单一操作A和B的能力的参数,是系统可操作性的主要指标,此外,还考虑了斯托克斯参数以确定该参数。
在实际实施之前,系统的理论建模表明,理想条件下的⟨S⟩大约等于0.248。 如果我们模拟系统,并考虑其实际参数,则-0.20⟨S⟨-0.14。
实际实验显示了良好的结果:⟨S⟩= -0.171±0.009,符合预期范围。 因此,科学家得出结论,他们的系统以不确定的因果顺序工作。 研究人员称其为这项成就的基础,或者说是两极分化,这使得以这种方式实施该系统成为可能。
为了使您熟悉实验的细节,我强烈建议您在
此处获得科学家的报告。
结语这项研究仅涉及诸如量子力学之类的复杂科学的某些方面的表面。 科学家们说,然而,继续朝这个方向努力,他们将能够取得甚至更令人印象深刻的结果,这些结果不仅可以改变计算技术,数据传输等,而且可以改变我们对世界的认识,使之成为可能失去其地位的自然科学定律。''坚不可摧。”
感谢您与我们在一起。 你喜欢我们的文章吗? 想看更多有趣的资料吗? 通过下订单或将其推荐给您的朋友来支持我们,
为我们为您发明的入门级服务器的独特模拟,为Habr用户提供
30%的折扣: 关于VPS(KVM)E5-2650 v4(6核)的全部真相10GB DDR4 240GB SSD 1Gbps从$ 20还是如何划分服务器? (RAID1和RAID10提供选件,最多24个内核和最大40GB DDR4)。
VPS(KVM)E5-2650 v4(6核)10GB DDR4 240GB SSD 1Gbps至12月免费,在六个月内付款,您可以
在此处订购。
戴尔R730xd便宜2倍? 仅
在荷兰和美国,我们有
2台Intel Dodeca-Core Xeon E5-2650v4 128GB DDR4 6x480GB SSD 1Gbps 100电视(249美元起) ! 阅读有关
如何构建基础架构大厦的信息。 使用价格为9000欧元的Dell R730xd E5-2650 v4服务器的上等课程?