美好的一天,亲爱的Khabrovites。
在哈勃(Habr)快速搜索“海上平台和造船”主题,基本上可以发现各种变相的海上发射和数据中心的淹没。 我建议稍微稀释一下这个话题。

2014年,我们公司(这是一家修船和造船厂)中标了一家石油公司的海上钻井平台支撑座的结构。 该公司在里海的两个领域(
链接1 ,
链接2 )运营
钻井平台安装地点的里海很浅。 因此,平台直接安装在海床上,并通过桩固定。 支撑块是平台的基础。 在工厂制造后,将其拖到位,然后将水倒入其压载舱中,并沉到底部。 下一步是在其上放置完成的平台。
该块是按节制作的。

这样的东西。
型材在车间组装,然后送入组装库存,并在那里进行组装。 事实证明:

我们的支持区建在距海岸60米处。 为了启动,有必要解决几个问题。 问题一:必须将重达5600吨,长度约100 m的结构上岸。 问题编号2。 有必要建造一艘旨在将这5600吨抛在上面的船只。 这艘船应该能够稍微下潜(即像
浮船坞一样工作)。
为了解决第二个问题,我们购买了两艘阿穆尔河型散货船:

他们靠自己的力量来到我们的工厂。 所有不必要的东西都从它们中删除了。 最后,我们得到了这样的双体船。

他不是自我推动者。 在每种情况下,都有6个压载舱。 船头塔上是中央邮局(CPU)。 机舱位于每个人鼻子的底部。 每个泵都有两个柴油泵和气动蝶阀,弹簧关闭和额外的手动控制。

他们在这里。 直径-250毫米
之所以选择气动,是因为用于紧急操作的能量存储简单,易于切换到手动模式。 当然,可以放置阀门或电动百叶窗。 但是在这种情况下,船上应该有一个专职的主要发电站和一个应急电源。 在这种情况下,所有关键设备均由电池供电。 其他所有东西都在海上喂食。 如有必要,我们在塔上安装了几台发电机(主发电机和备用发电机)。 在运行期间连接和切换发电机不会中断工作本身。
在船上安装之前,我们在车间检查了这些闸门。 触发气动阀后,带有轻微“ pshhh”声音的百叶窗会在1.5秒内平稳打开。 关闭时,它也可以平稳安静地关闭。 我们的锁匠-男性,裸露双手拧紧和拧紧螺母(包括19个螺母)-经历了审美的狂喜,并热情地要求提供更多...
6个闸门控制水流到压载舱中。 其余的设置泵的运行模式-填充或泵送。 所有这些都是由控制站命令的。

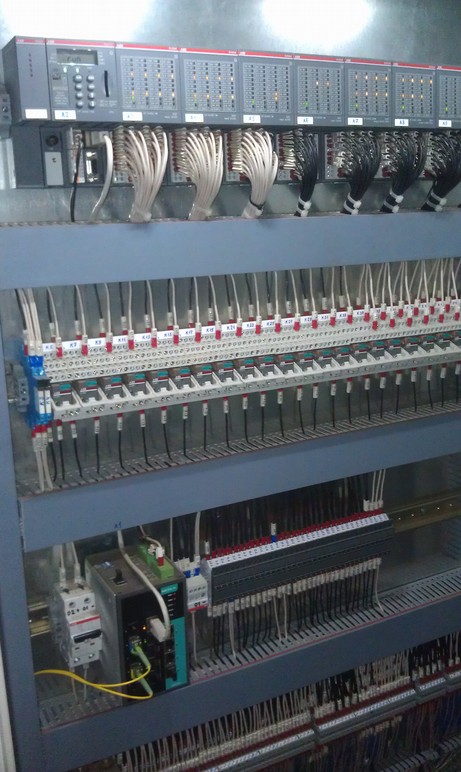
这是她的内脏。
CPU中的两个控制台和一个远程控制通过光学中的“环形”拓扑网络连接。

这是我们的遥控器。
它基本上是在没有物理按钮的情况下制作的(嗯,例如“玻璃小屋”)。 鼠标右键-控制DVR。
当打开主(大)面板上的遥控器时,将打开以下邀请:
什么时间,这样开玩笑。 多次向外国人显示此屏幕保护程序。 笑,但不敢推。

该屏幕显示每个压载舱中的水位和体积以及6个点的沉积物。
作为液位传感器,我们使用了俄罗斯著名的“ zodiac”制造商的潜水静水压力传感器。

在此屏幕上进行每种情况的设备控制。 通常,每个面板都可以控制任何机箱。

这是一个小面板-krenodifferententometr。 显示船只相对于水面的坡度。 对他来说,信息来源是舷外液位传感器。 此外,在知道几何尺寸的情况下,计算了后跟和修剪的角度。
我们建造-建造,最后建造! 现在是进行测试并提交给各个监管机构的时候了。
我们在压载物舱(大约一米)内注入了一些水,...水动力冲击开始了! 当切换泵的工作模式,打开和关闭压载门时,它们就会出现。 这些冲击对我们的膜产生的声音冲击非常敏感。
在我在场的情况下,这种打击从泵上撕下了厚度约7毫米的铸铁检查口。 一股强大的水流开始冲破它。 想象自己是一名潜水艇英雄,并试图重新吸引我,我开始疯狂地扭转舷外闩锁-金石。 我们让他们手动控制。
我们解决了罢工问题。 这是一套措施。 其中之一是减慢开闭周期。 但是,如果有人用力砸金属门,则肚子里的东西会试图掉到踢脚线下方。
现在是时候在滑板甲板下面进行测试潜水了。 一旦水淹没,压载舱中很大的自由表面开始受到影响。 这导致了堆积。 在那一刻,它并不可怕,但非常不愉快。 它可能导致的结果:
link 。 这是一家不同的工厂,与我们的工厂相同。 幸运的是,当时没有人受伤。 我们通过安装其他浮子和填充隔室的技术解决了这个问题。
现在该走了!
为此,将设备降到轨道上-幻灯片。 每个半站在两条路径上。 每个轨道上安装了两个液压缸。 Sklizy厚涂。

但是为了进行,有必要解决液压缸同步的问题。 气瓶之间的距离约为100m。 从液压站到缸的距离是不同的。 块的重量不同。 摩擦力也可能由于各种原因而改变。 如果您愚蠢地打开电源并不受控制,那么我们可以保证会有偏差和偏移。 您还需要记住,您不能打开倒档。
我们通过在四个轨道的每个轨道上安装摄像机和标尺来解决此问题。 滑动操作员必须打开和关闭圆柱组,以在所有轨道的标尺上保持相同的值。 速度相当舒适:大约15分钟内经过了1.3米(一级)。 之后,我们移动了挡块,设置了标尺,然后继续行驶。

最后,我们驱车前往了海岸的边缘。 到这个时候,双体船已经牢固地停泊了,它的滑动路径通过移动的链节连接到岸上的路径。
抒情离题。 想象一下,你想骑这样的双体船:

它平稳优美地站立着。 您踩到他-他会跟着踩。 您转到中间-滚动离开。 但是草案增加了。 您正在转移到另一侧-他已经在那边了。
我们必须经历同样的过程。 只是规模的其他和后果。 我们的任务是防止这种情况。 为此,我们必须在镇流器舱内一定量的吃水,并有一定量的水。 在每一步中,我们都必须从一个外壳中抽水,然后将其倒入另一个外壳中。 在某个步骤中,相反的是先填充第一个,然后从第二个中抽出。 同时,按照与海岸有关的方向滚动,调整,定位,并与将要拜访我们的海岸团队协调所有行动。
我们的人员针对每个步骤对隔室中的水量进行了计算。 滑动时我们使用了这些计算。

整个过程持续进行了18个小时,并在深夜愉快地结束了。
双体船的压舱舱已完全抽空。 他本人被带到另一个地方。 他在那里站了一年。 一直以来,工作仍在继续。 一年后,我们将其投放到了水中。 但这是下一个故事。
双体船过渡到新地方后,我们遇到了无法解释的现象(我希望到目前为止)。 就像我在上面说的那样,后跟和修剪的角度是根据舷外液位传感器的读数计算得出的。 滑动时,该系统以及其他水平传感器均能完美运行。 但是,在移到新的位置(下游300 m)之后,船体的所有三个舷外传感器都位于距离海岸较远的地方(“标尺船体”),开始显示吃水深度约20厘米! 因此,我们的电子设备开始崭露头角! 但是应急装置(一个简单的构造骤然下降)并没有证实这一点! 传感器和所有电子设备均经过仔细检查。 他们什么都没找到。 有一种假设是,这些是暗能量的诱因-水动力。 传感器位于船首,中部和船尾的平坦部分。 他们有单独的阀门直接焊接到底部。 在新的地方,河底的轮廓更平整,而这个主体(河底大部分是平坦的)更牢固地伸入了杆中。 而且,在我看来,这栋建筑所在地区的河流速度更高。 也许是这样吗? 我有一个怯的假设,这个假设还没有被驳倒,但是我现在暂时不想说。 哈布罗夫斯克人能否解释这种现象?