秋天到了 ,
白菜开花了 ,
快到了冬天,我刚把它弄乱了。 但是,您还是想玩一些古老的音乐,比如窗外的暴风雪,例如Sonic或Jim的蠕虫。 本文底部是具有初步结果的视频。

如果您在模拟器上玩过SMD游戏,您可能会注意到,这些游戏最方便的游戏手柄是SMD的本机游戏手柄。 对于大多数其他游戏机,在模拟器上玩游戏时,很有可能使用相同的Xbox或Logitech游戏手柄,该标准是在90年代末左右形成的。 但是直到90年代末,每个人都尽其所能。
从SMD购买游戏手柄并不难,通常,您可以在游戏机本身的克隆品以相当实惠的价格出售的情况下购买,大约300卢布。
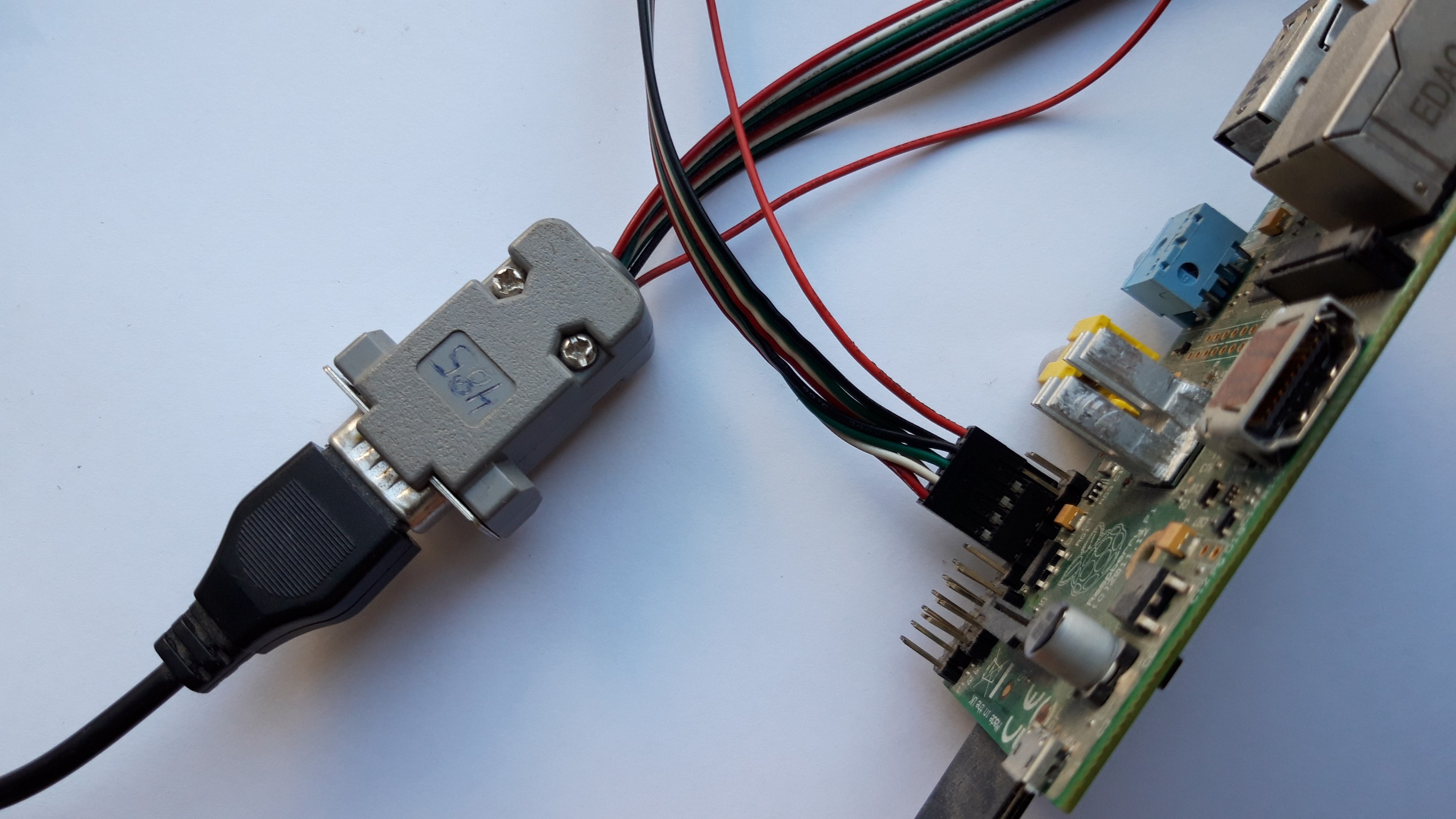
和以前一样,我使用了退役机壳和爸爸DB-9连接器上的USB电缆来组织与Raspberry pi的连接。 GPIO在程序中绘制了结论。 游戏手柄从3.3伏特起即可正常工作。
与往常一样,选择仿真器引起了问题,最好的选择是仿真器-Picodrive,它针对ARM进行了优化,结构合理,据我所知,它是RetroPi组件的一部分。 但是在集会上,我不得不稍作修改。 源代码位于Github服务
上的此地址 。
要进行构建,我们需要从模拟器作者的存储库中获得3个成功要素:
- Picodrive仿真器本身;
- CPU仿真器-cyclone68000;
- 和FrontEnd-Libpicofe。
现在,所有这些都需要正确组合。 打开或不打开
Picodrive的包装 ,具体取决于您的下载方式。 现在,使用
cyclone68000打开目录,必须将其内容复制到该目录:
/ /picodrive-master/cpu/cyclone
您还需要
处理Libpicofe目录的内容,将其内容复制到该目录中:
/ /picodrive-master/platform/libpicofe
现在,您需要准备组装:
进行配置
sudo ./configure
配置完成后,将创建一个文件
config.mak ,在其中您将需要查找和更改一些行。 下面是完成的结果:
AS = arm-linux-as LDLIBS += -L/usr/lib/arm-linux-gnueabihf -lSDL -lasound -lpng -lm -lz -lwiringPi ARCH = arm PLATFORM = rpi1
接下来,您需要编辑文件
-config.h 。 它位于目录中:
/ /picodrive-master/cpu/cyclone
在其中,您需要将它们放在变量中:
#define HAVE_ARMv6 1 #define CYCLONE_FOR_GENESIS 1
现在是软件部分与往常一样,有必要找到一个地方来处理与按下按钮有关的信息,理解
并原谅代码,然后加以替换。
不用怀疑,我将立即说出您要查找的文件位于目录中:
/ /picodrive-master/pico/
在这里,我们对3个文件感兴趣
-pico.c ,
memory.c ,
memory.h 。 可能您可以使用较小的数字,然后将所有内容都填充为一个,但是在我看来,这更容易。
因此,在
pico.c文件中
,我初始化了库并初始配置了GPIO引脚。
我将立即给出部分文件头:
#include "pico_int.h" #include "sound/ym2612.h" #include <wiringPi.h> #define Data0 3 #define Data1 4 #define Data2 5 #define Data3 12 #define Data4 13 #define Data5 10 #define Select 6 struct Pico Pico; struct PicoMem PicoMem; PicoInterface PicoIn;
如您所见,
WiringPi库的标题为
set ,并定义了一些定义,它们的显示位置略低一些。 好吧,例如,现在在
void PicoInit(void)函数中:
void PicoInit(void) { ... ... PicoDraw2Init(); wiringPiSetup (); pinMode (Select, OUTPUT); pinMode (Data0, INPUT); pinMode (Data1, INPUT); pinMode (Data2, INPUT); pinMode (Data3, INPUT); pinMode (Data4, INPUT); pinMode (Data5, INPUT); digitalWrite (Select, HIGH); }
这是模拟器内存初始化功能(之类)。 这是我插入GPIO引脚的所有设置的地方。
这是DB-9连接器的引脚排列 。
在这里我必须说游戏手柄有6个信息触点(Data0 ... Data5),一个控制器(Selest)和电源。
接下来,我们有相同的定义-定义,我们需要再次重复。 这可以在
memory.h和
memory.c中完成 。 我选择了第一个选项。 列出这个没有意义。
因此,我们找到了最有趣的
-memory.c文件。 它有2个功能强大的名称:
static u32 read_pad_3btn(int i, u32 out_bits) static u32 read_pad_6btn(int i, u32 out_bits)
这些名称似乎毫不含糊地暗示着阅读3键和6键游戏手柄的状态。
在此必须阐明,任何6键游戏手柄都可以用作3键。 而游戏的狮子部分恰好与此游戏手柄模式配合使用。 在此模式下,每16毫秒一次Select输出的状态会更改。 当Select = 0时,将读取按钮的值-UP,DOWN,A,开始。 当Select = 1时,将读取按钮的状态-UP,DOWN,LEFT,RIGHT,B,C。下面是此模式的工作方式示例。
我将立即列出更改后的功能:
static u32 read_pad_3btn(int i, u32 out_bits) { u32 pad = ~PicoIn.padInt[i];
这里的
i是游戏手柄的编号,表达式
if(out_bits&0x40)// TH仅负责Select输出的状态。 值得注意的是,在仿真器中,按钮的状态以与控制台中相同的形式给出。 按下的按钮= 0。
这是工作的结果:
在下一个系列中继续,
Pip-Pip-Pip