卡内基梅隆大学初创公司打算在未来的汽车中使用无线电驱动交叉路口

寿命短,交通似乎更短。 或者,当您站在交通信号灯处时,红灯亮,并且没有人沿着十字路口行驶。
在墨西哥城,圣保罗,罗马,莫斯科,北京,开罗和内罗毕等城市的郊区,早上开车上班可能会超过两个小时。 在这里添加下班回家的路,通常人们每天会花3-4个小时在路上。
想象一下,我们可以开发一个系统,将每天的往返路程减少三分之二,从三个小时减少到两个小时。 这样可以每月为您节省22个小时,或在35年的职业生涯中节省3年。
令人振奋,不高兴的旅行者去上班和回家,因为已经开发了这样的系统,该系统基于几种最新技术。 其中之一是汽车之间的无线通信。 尽管交通信号和其他基础设施也可能包含在此连接中,但它通常被称为V2V(车对车)技术。 机器人技术是另一种新兴技术,从本质上讲,它可以减少上班时间(并提高工作效率)。 还有
物联网 (IoT),该物联网有望不仅汇聚70亿人,而且汇聚300亿个传感器和设备。
使用我和我的同事在匹兹堡卡内基梅隆大学开发的算法,可以使所有这些技术协同工作。 该算法允许汽车使用其车载消息系统一起工作,从而使汽车平稳,安全地行驶,而无需使用任何交通信号灯。 对于这个项目,我们注册了公司Virtual Traffic Lights [虚拟交通灯](VTL),仔细检查了仿真中的算法,自2017年5月以来,这个项目一直在大学校园附近开展工作。 7月,我们首次在沙特阿拉伯向公众展示了VTL技术,有100多位科学家,政府官员和私人公司代表参加了此次会议。
测试结果证实了我们已经怀疑的事情:该是拒绝交通信号灯的时候了。 我们没有什么可失去的,只是无数小时地坐在车里。
自1912年发明该装置并在盐湖城和两年后在克利夫兰推出以来,交通信号灯的原理就没有太大变化[
值得澄清的是,我们正在谈论的是第一个电子交通信号灯。 第一个带有手动驱动器的设备是在19世纪伦敦/大约19世纪发明的。 佩雷夫 ]。 它可以使用计时器,因此有时您会站在路口的红色,而看不到附近的其他汽车。 可以对计时器进行调整,使其与一天中不同时间的运动方式相匹配,但是实际上几乎可以完成所有工作-并没有那么多[
在这里,作者很狡猾-长期以来,带有摄像头的自动交通控制系统可以捕获交通,中心的远程交通控制系统,人们可以监控交通拥堵/大约 佩雷夫 ]。 结果,很多人每天花费大量时间。
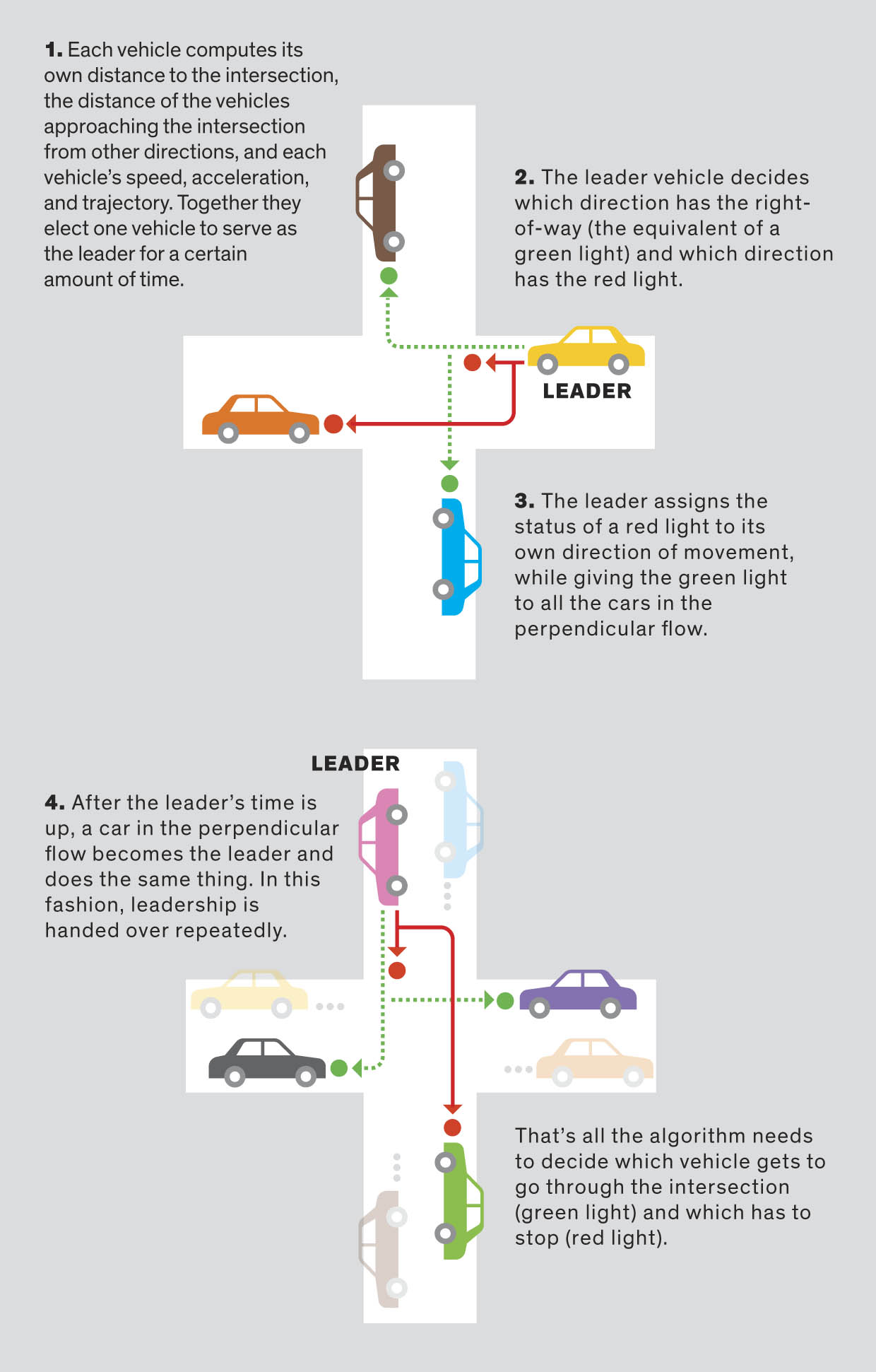
想象一下,取而代之的是,借助V2V技术,几辆汽车驶向交叉路口,交换数据。 他们共同投票并选择某个时期的领导者汽车,在该时期中,汽车决定哪个方向成为主要方向(相当于绿色指示灯)以及哪个方向“红色发光”。
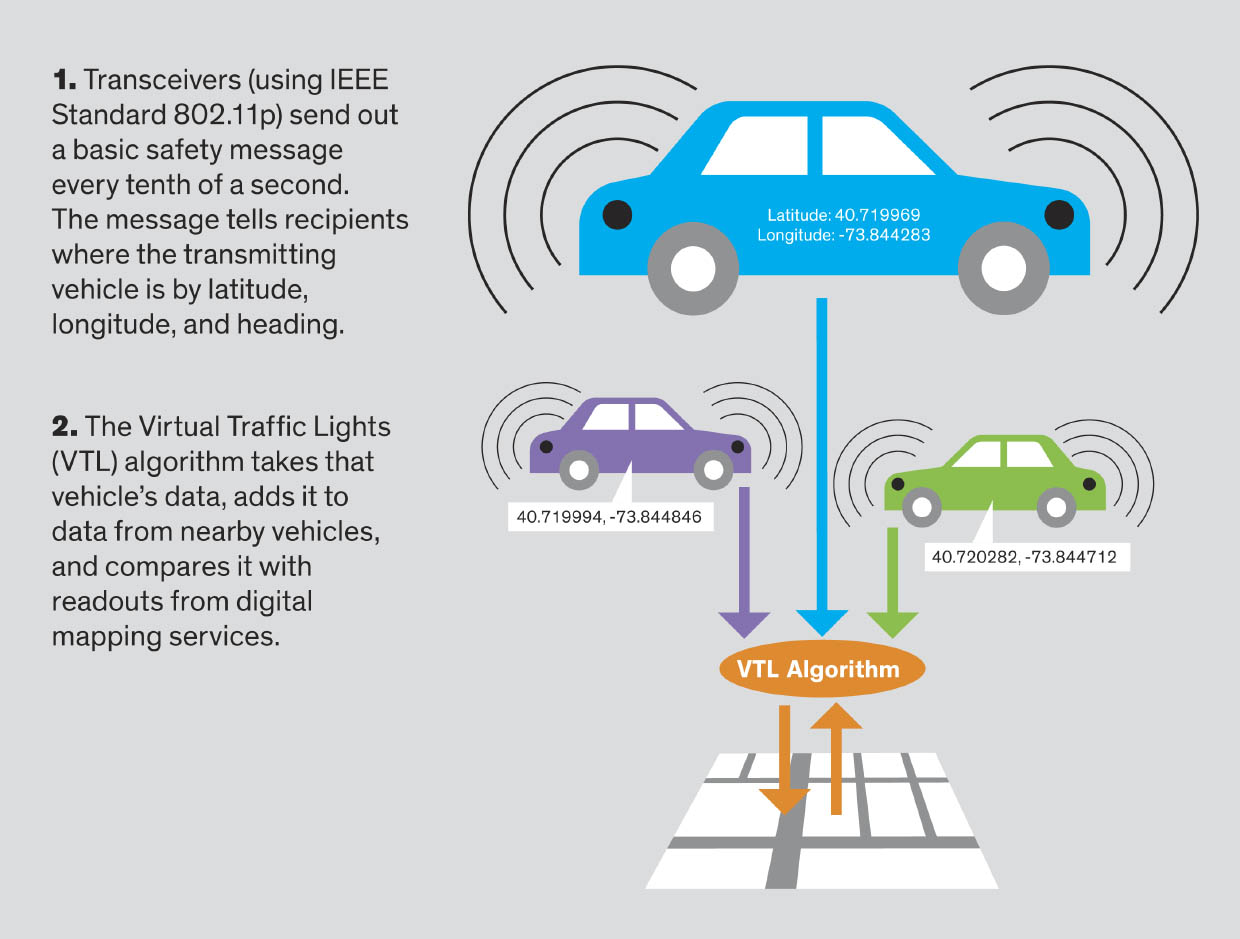 IEEE 802.11p收发器每秒发送消息10次。 该消息指示机器的坐标和运动方向。
IEEE 802.11p收发器每秒发送消息10次。 该消息指示机器的坐标和运动方向。
该算法接收数据,将其添加到其他计算机的数据中,然后将其与数字卡进行比较。谁有主要道路? 一切都非常简单且尊重地进行。 领导者为其移动方向分配红灯状态,并为所有垂直行驶的汽车提供绿灯。 例如,在30秒后,另一台垂直流动的机器成为领导者,并且执行相同的操作。 领导不断地到处转移,以诚实地分担责任和负担-毕竟,领导者的地位与为共同利益牺牲个人利益有关。
通过这种方法,不需要交通信号灯。 流量控制工作无缝地融入了无线基础架构中。 如果没有人沿着十字路口行驶,您将不再坐在车里,站在红色的交通信号灯旁。
我们的VTL算法通过询问诸如从每个入口到交叉路口的前车距离,车速,每条道路上的车数等参数来选择领导者。 在其他条件相同的情况下,该算法会选择距离交叉路口最远的汽车,以便有时间制动。 该规则确保最接近回旋处的车辆获得通行权-即虚拟绿灯。
重要的是要注意,技术不需要照相机,雷达和激光雷达。 它从通过专用短距离通信(
DSRC )运行的无线系统接收所有信息。 这些是无线电电路和为它们分配的通信信道,在1999年至2008年期间在美国,欧洲和日本开发,并允许附近的汽车相互通信。 DSRC开发人员设想了使用该标准的各种选择,包括为使用收费公路和协作式自适应巡航控制收取费用-以及我们用来避免交叉路口碰撞的功能。
从工厂开始,DSRC系统就安装在少量机器上(并且可能由新的5G技术
取代 )。 但是
可以购买此类收发器,并且它们具有我们需要的所有功能。 它们使用
IEEE标准802.11p ,并且要求每秒发送十次消息。 该信息应表明车辆的坐标和运动方向。 我们的算法可以在汽车的计算机上工作,可以在汽车上接收数据,将其从相邻汽车接收到的数据相加,然后将结果叠加在数字卡上,例如Google Maps,Apple Maps或OpenStreetMap。
这样,每辆汽车都可以计算到十字路口以及从其他方向接近该十字路口的其他汽车的距离。 她还可以计算每台机器的速度,加速度和轨迹。 这就是算法所需的全部内容,以确定谁将通过交叉路口(绿灯)和谁需要停止路口(红色)。 之后,每辆汽车的仪表板将显示交通灯的颜色,该颜色对于每个驾驶员而言都是自己的。 当然,VTL算法仅解决交叉路口的交通控制问题,标志的定义为“停车”和“允许方式”。 他不开车。 但是在其领域工作,VTL能够做到所需的一切,并且比全自动汽车技术便宜得多。 机器人移动设备需要更多的计算能力,才能找出来自其激光雷达,雷达,摄像机和其他传感器的数据,甚至更多,因此,将它们组合起来,就可以获得周围空间的图像。 VTL不与机器人技术竞争,而是对它们的补充。
我们的方法可以想象为用真正的智能代替实际规则。 该算法允许机器自己控制流量,就像对昆虫群落和鱼类群一样。 一所鱼类学校同时改变了其运动方向,而没有一些主要的交通管制员指挥其个别成员。 每条鱼都从邻近鱼接收运动信息。
这是分布式系统作为集中式网络替代方案的行为示例。 有了它的帮助,城市中的车队就可以独立调节交通,而无需集中控制和人工干预-无需警察,交通信号灯,停车或让路标志。
我们没有发明智能路口的概念;它已经存在了几十年。 最早的想法之一是在沥青表面下安装电磁线圈,这将确定汽车到十字路口的路线并调整绿相和红相的持续时间。 您也可以在交叉路口使用摄像头来计算接近的汽车,并计算出交通信号灯相位的最佳时间。 但是,这两种技术的安装和维护都很昂贵,因此安装在很少的交叉点。
我们首先在两个城市的虚拟模型中引入VTL算法:美国的匹兹堡和葡萄牙的波尔图。 我们从美国人口普查局和葡萄牙相关机构获取了交通数据,从Google Maps中添加了地图,并将其全部输入到德国航空航天中心开发的开源软件SUMO(城市交通仿真器,一种城市交通模拟器)中。
SUMO在两种情况下模拟高峰时间-一种使用现有的交通信号灯,另一种使用我们的VTL算法。 发现VTL在波尔图将平均旅行时间从35分钟减少到21.3分钟,在匹兹堡从30.7分钟减少到18.3分钟。 从郊区进入城市的人们的出行时间减少了不少于30%,最高减少了60%。 重要的是,行进时间的变化(数量与平均值的偏差)也减小了。
 领导人选拔方案
领导人选拔方案节省时间有两个原因。 首先,当没有人沿着十字路口行驶时,VTL消除了红色交通信号灯的等待时间。 其次,VTL控制所有路口的交通,而不仅限于有活动信号的地方。 因此,如果附近没有其他车辆,这些车也不必停下来,例如在有停车标志的地方停车。
我们的模拟显示了其他好处-也许比节省时间更重要。 交通事故的数量减少了70%,并且减少的大部分发生在十字路口和停车标志处。 此外,通过最大限度地减少在交通信号灯前站立,加速和制动所花费的时间,VTL大大减少了汽车的碳排放。
将VTL从实验室转移到现实世界需要什么? 首先,您需要在人造汽车中构建DSRC。 2014年,美国国家公路交通安全管理局提议使用此技术,但特朗普政府尚未制定适当的规则,目前尚不清楚最终的决定。 因此,美国的制造商不愿将DSRC收发器集成到机器中,因为它们增加了成本,并且只有在其他机器上使用时才有用-这是标准的鸡肉和鸡蛋问题。
在足够数量的机器配备有此类设备之前,生产规模将保持较低水平,而成本将保持较高水平。 在美国,只有通用汽车才开始将DSRC收音机集成到汽车中,并且它们都是昂贵的凯迪拉克车型。 但是,在欧洲和日本,情况更为乐观。 许多欧洲汽车制造商决定将这些收发器集成到汽车中,并于今年开始于日本政府倡导使用技术的日本,制造巨头丰田汽车公司一再确认已准备好采取这一步骤。
但是,即使DSRC没有任何反应,我们的算法也可以基于其他无线技术(例如5G或Wi-Fi)构建。
收发器不完全渗透的概念引起了VTL实施的最大障碍之一的问题。 如果只有一小部分汽车配备了发射器,是否可以工作? 是的,如果官员们决定为现有的交通信号灯配备这项技术。
官员们可能只想这样做,以免放弃价值数千亿美元的现有基础设施。 我们为这个问题提供了一个短期解决方案:您可以更新现有的交通信号灯,以便他们可以识别道路上装有DSRC的汽车的存在,并相应地设置绿色和红色阶段。 该方案的优点在于,无论是否有收音机,所有汽车均可使用道路和十字路口。 根据我们在匹兹堡的模拟和现场试验,这种方法可能不会比理想的解决方案节省更多的时间,但仍比当前的交通管理系统好23%。
另一个问题是如何与行人和骑自行车的人打交道。 即使所有汽车和卡车都被强制配备了收发器,也不能指望骑自行车的人会设置它们并由行人携带。 因此,人们很难安全地穿越繁忙的十字路口。
在交通信号灯和VTL共同存在期间,我们的短期解决方案是使行人有机会布置自己的主要道路。 在我们位于匹兹堡的试点计划中,我们在十字路口的所有四个侧面放置了一个按钮,该按钮点亮红灯(对行人来说是真实的,对于汽车是虚拟的)。 该系统在每次激活时都有效。
从长远来看,可以借助物联网解决骑自行车者和行人的问题。 借助IoT扩展,每个人都将始终携带支持DSRC的设备的时机已经到来。
同时,我们已经证明,在理想条件下,没有任何物理信号,赞成路权的汽车可以将部分自行车分配给行人。 在换档期间,交叉路口所有入口处的所有汽车中的虚拟红灯都亮起,持续时间足够长,以使行人安全地过马路。 这种初步的解决方案对于密集的流量并不是最佳选择,因此我们正在研究一种方法,该方法使用安装在汽车仪表板上的廉价摄像头,该摄像头应有助于注意行人并让其离开。
虚拟交通信号灯的有前途的技术使机器人移动时代进入了时代。 如今,我们可以想象,这样的汽车将完成人类驾驶员所做的一切:在交通信号灯处停车,在“让步”标志处让步,等等。 但是为什么要自动化一半呢? 如果这样的机器完全独立地控制运动而没有通常的信号和信号,那就更好了。 实现此目标的关键是V2V和这些通信的基础结构。
这很重要,因为当今的机器人常常无法在繁忙的十字路口导航和行驶。 这是最困难的技术问题之一,甚至继续困扰着Waymo行业的领导者。
在我们的模拟和现场试验中,我们发现配备VTL的机器人可以在没有交通信号灯和标志的情况下控制交叉口。 无需识别这些物体的需求,极大地简化了计算机视觉算法和运行它们的计算机,而这正是当今实验性的移动机器人所依赖的。 这些元素与传感器(尤其是激光雷达)一起构成了机器人最昂贵的部分。
由于VTL的软件体系结构是模块化的,因此很容易将其集成到机器人移动软件中。 此外,VTL能够解决与计算机视觉相关的大多数(即使不是全部)最困难的问题-例如,如果阳光照在相机中,或者下雨,下雪,沙尘暴或道路弯道遮挡视线。 VTL当然不能与机器人技术竞争。 它补充了他们。 仅此一项就可以帮助加速自动驾驶汽车在路上的撤离。
但是我们希望在此之前很久,我们的系统就能在人们控制的机器上运行。 到今年7月,我们已经能够在沙特阿拉伯利雅得市以43°C的高温进行公开的技术演示,并在测试机上安装了设备。 政府,学术界和包括Uber在内的公司登上了一辆梅赛德斯-奔驰巴士,绕过三个十字路口绕过阿卜杜勒阿齐兹国王的科技园区,其中两个没有交通信号灯。 公交车,GMC卡车,现代SUV和雪铁龙乘用车都以各种可能的方式越过这些交叉路口,并且VTL系统每次都能成功运行。 当一个驾驶员没有特别遵守红色交通信号灯并试图越过十字路口时,我们的安全系统通过向所有其他接近的汽车显示红色闪烁来工作,从而防止了事故的发生。
我希望这一刻是我们运输管理系统的转折点。 交通信号灯一直在起作用。 实际上,它们已经存在了一百多年。 现在该继续前进了。