
酒店和游乐园需要无人机表演。 艺术家和烟花虽然不错,但还不够。 您需要为客人准备一些好东西。 无人机秀就是这样。 我们参加了为一个外国游乐园组织定期无人机表演的项目。
现在我们知道了如何在俄罗斯做同样的表演。
当机群中有300或1,000辆车时,定位精度(即每个无人机相对于地面和彼此的位置)没有特别的作用。 这是滚动质量,其中粒子彼此之间相距几米。 质量非常昂贵。 正负计在这里无关紧要:他们认为观众离得很远,而且无人机的确很多,就可以了。 即使有几片摔倒也没关系。 但是,例如酒店和公园等规模不大的活动的组织者,需要的无人机数量为20-90件,因此位置至关重要。
在这种情况下,您只能采取准确性和同步性。 我们解决了这个问题。
为什么以及一切如何
CROC拥有一个机器人部门。 它诞生于2012年,从事各种有趣的事情,但其主要方向是无人机控制。 我们正在削减自己的软墨水,以控制无人机并解决非标准任务。 2013年竞赛的参与者可能会在github上了解
此代码 ,而
该代码是我们开发并用于控制无人机飞行中的无人机的。 当时,我们正在解决市场的一项新任务-将无人机冻结在正确的位置,并小心地避开弯角和障碍。 今天,这似乎很荒谬。
此外,我们正在基于SPH工程软件等供应商软件进行无人机管理项目。 他们既有一个UgCS软件地面站,又有一个成熟的大型dronoflot指挥中心。 UgCS可以控制一大批无人驾驶车辆,这与常规地面控制站不同。 对于管理人员,我们的意思是计划一条飞行路线,例如,用于救援行动或在安全范围内飞行,发送远程命令并监视车辆状态。 实际上,对于无人机表演来说,所需的功能与命令中心大致相同。 现在,在UgCS平台的基础上,出现了高度专业化的Drone Dance Controller软件,但这并不是马上的事情。
以及如何
柔软的 我和我的搭档在短时间内进行了测试的第一个版本使用了大多数民用无人机的标准功能,即沿着给定的路线飞行。 路线是一组坐标,无人机之间以给定的速度沿直线移动,沿着道路做一些有用的事情。 对于大多数由无人机解决的任务,这样的飞行计划绰绰有余。 但是至少其中没有时间同步,也就是说,很难使无人机在正确的时间到达给定的点,这对于团队飞行至关重要。 但是,第一个版本是第一个版本,以便快速构建它并开始运行。 我们以标准方式绘制路线(当然是在UgCS中),将其加载到无人机中并向前行驶。
如前所述,飞行同步已完成。 在无人驾驶飞机的航线上,可以识别出无人驾驶飞机停在哪里并等待地面命令继续飞行的地点。 我们称它们为同步点。 地面操作员必须确保所有无人机均到达同步点,并向其发送“继续”命令以继续飞行。
铁 第一个版本仅使用标准类型的路线,因此允许使用来自不同制造商的无人机。 但是我们立即决定修复目标平台并对其进行所有测试。
当时没有现成的无人机。 它们不是在撰写本文时,但是希望它们会尽快出现。 同时,您必须自己收集它。 我们以450毫米的框架为基础进行组装,一方面,我们选择了开源Pixhawk作为自动驾驶仪,以使我们的双手在硬件和固件上都不受约束。 另一方面,使用户可以轻松购买所有必要的组件并自行组装合适的产品。 但是通常,只有自动驾驶仪是严格固定的。 其他结构元素是可选的。
重要的一点-我们立即开始专注于GPS RTK技术。 它使您可以达到相对于地面基站的厘米定位精度(常规GPS精度为3+米)。
是的,GPS RTK使一切变得复杂,因为它要求每台设备上都具有支持GPS RTK的接收器,您需要不断向这些接收器发送来自地面站的数据。 但是没有什么可做的:我们知道我们和我们的客户不会立即到达大型机队。 空中有成千上万的无人驾驶飞机,您可以绘制精美的大型体积图形,其中每个无人机的位置对眼睛来说都不是很关键。 数十架无人机可以绘制什么? 这些很有可能是一些小的简单几何图形及其转换,对于这些图形,飞行的准确性至关重要。 粗略地说,无人驾驶飞机应该能够成一直线排列,令人愉悦并且没有瑕疵。
此外,亚特兰大的无人机带有RGB LED。 它们的工作可以合并到任务中,也可以从地面进行控制,但是同时,必须考虑无线电信道的额外负载。 但是,无人机可以代替烟火来携带烟火碎片,尽管您当然必须非常小心。
这是使用第一版硬件和软件(以及仅使用烟火技术)进行的首批飞行的示例。 正常的线条也清晰可见(好吧,好吧,好。还有一些工作要做。),以及手动同步。 也就是说,在演出期间大约40至50次,操作员单击“让我们走得更远”,然后将下一个团队派到所有人的无人机上。
但是已经发生了一些事情。
因此,客户飞离了日常演出的季节。
现在如何运作
实际上,第一个版本不是最成功的解决方案。 首先,持续不断的手动同步是有害的。 例如,由于无线电通讯不佳,“继续”命令可能无法到达无人机。 在这种情况下,每个人都会飞走,而他,那个贫穷的人,将会留下来。 其次,不可能创建复杂的路线,这会阻止创建动画绘画,只有静态场景是可能的。
现在一切都变得更加容易:大约半年前,供应商发布了该软件的特殊版本-例如Drone Dance Controller。 在这里,他在自动驾驶仪上产生了些许变化,并教他沿明确的GPS时间参照任意轨迹自主飞行。 可以在3D编辑器中或使用脚本来准备轨迹。 现在,操作员需要单击“开始”按钮并戒烟。 输出可能是这样的:
或这样:
但是,在破坏肺部之前,团队需要完成演出的关键准备阶段。
因此,首先,有必要准备机队:确保所有无人机处于致命状态,配置正确,并且在运输过程中没有从其上掉落。
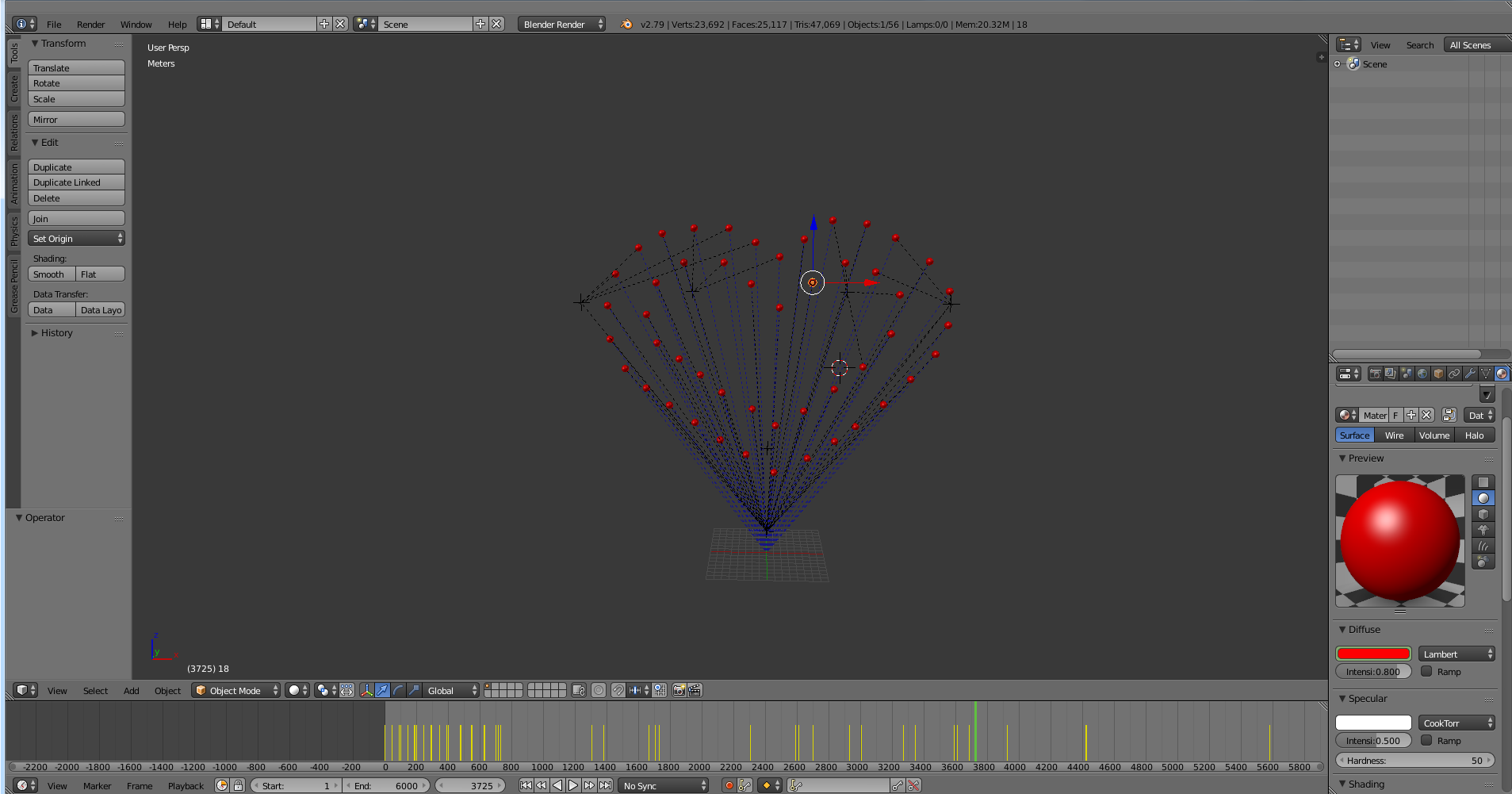
与此同时,表演本身必须做好准备。 我们从可以在3D编辑器中完成的动画开始,例如在Blender中:
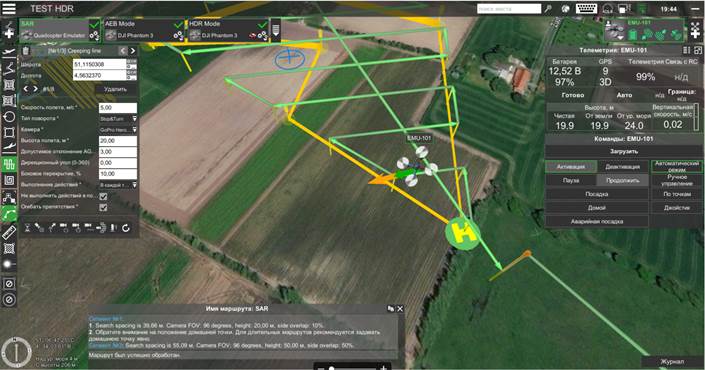
接下来,我们将动画的轨迹转换为自动驾驶可以理解的格式。 而且,在出发飞往野外之前,我们会仔细检查模拟器并评估结果。 仿真使我们有机会将虚拟无人机放置在必要的坐标中,并像在实际设备上一样在我们的软件中使用它们。 您可以实时评估它们的飞行,还可以对它们的运动进行后处理,并在某种3D场景中可视化结果。
视频-从不同角度看的可视化示例。
视点:查看器
观点:发射台
观点1
观点2
之后,我们去现场进行测试。 我们部署基础设施(地面站,通信),安排无人机。 我们检查它们运输是否良好,所有无人机都已连接到我们的站点。 此外,该软件会自动确定应该在哪条路线上飞行的无人机。 我们设置开始时间-并向前。
然后-和节目本身。
当然,关于“戒烟”-这是个玩笑。 因为直接在飞行过程中,操作员和观察员应该监视机队的当前状态,并在必要时做出决定,以决定是否有故障(在所有意义上)无人驾驶飞机紧急降落。
当然,有许多限制。
天气:(暂时)我们不会在雨雪中飞翔,而且我们真的不喜欢5 m / s以上的风。 很明显,无人机将以10 m / s的速度飞行,但是保持位置的准确性可能不是很好。
在与无人机通信的频率上,空气应该相对自由。
安全:观众必须从演出场地移开一定距离,因为无人机通常会掉落。
在计划时必须考虑所有这些。
合计
您可以收集大量无人机,购买UgCS软件,从我们那里获取建议并开始飞行。 如果您已经具备一定的无人机育种能力,那么一切都不会很困难。 我知道那些在获得许可证和实施软件建议后24小时举起20架无人机试飞的家伙(尽管他们已经拥有了机队)。 如果没有能力,但您想参加这样的表演,那么我们的工程师可以实施这样的项目,在所有方面培训您的专家并继续提供支持。 如果您只需要进行一次表演,请写信,我们将进行讨论。
参考文献