在什么情况下“联盟”紧急启动后,杰出的
Zelenyikot为太空计划的健康写了一部鼓舞人心的祝酒
晚会 。 这是发现的评论:
许多哈布罗夫斯克公民认为,航天的发展主要是
载人航天的发展。 过去是这样,将来也应该如此。
同时,许多哈布罗夫斯克居民认为载人航天计划,特别是国际空间站机组人员的工作,有力地刺激了新技术和科学的发展。 在轨人员正在做一些聪明,复杂且非常非常重要的事情。 甚至更令人难以置信的聪明人也在地面实验室工作,提供以下实验:他们思考,处理获得的宝贵数据,在科幻小说的边缘创建狡猾的精密工具,否则,这些实验就无法进行...
我建议看一个
实际的例子,看看它
是如何工作的。

摘要:杂项,缺乏宽容,nenashi。 还有一些有关空间修饰的知识。 (+批评-提供!)
实际部分,TTX-进行一些分析:TTX背后隐藏的是什么,轨道站内无人机的目标如何,它们在真正的国际空间站上的命运是什么? 为何如此-怎么可能? 爬入新的一年的幻想1.无人机概述1.0。 地点:国际空间站为什么无人机的想法对国际空间站具有吸引力?
回顾在陆地上使用无人机的主要主张就足够了:
-很吵;
-飞行时间短。
由于无人机的引擎必须处理重力,因此第一和第二引擎均如此。 发动机被迫在某个功率阈值以上工作(否则无人机将无法起飞)。 电动机很快耗尽了电池; 装有负载的绕组和螺丝以高速搅拌空气,可产生清晰而有力的声音。
在没有重力的国际空间站上,发动机可以按自己喜欢的那样微弱地工作。 您可以非常经济地消耗电池; 不会有大声喧noise。
而且。 由于国际空间站本身是一个嘈杂的地方(强制通风,许多机架,这些机架具有不断运行的设备,生命支持系统和站台定位维护-总消耗约为50 kW),因此,尽管发动机在形式上运行正常,但它发出的声音通常听起来不错,但实际上它的目的可以认为是沉默的。 对于车站的人们来说,这不会是另一个令人讨厌的声音干扰。
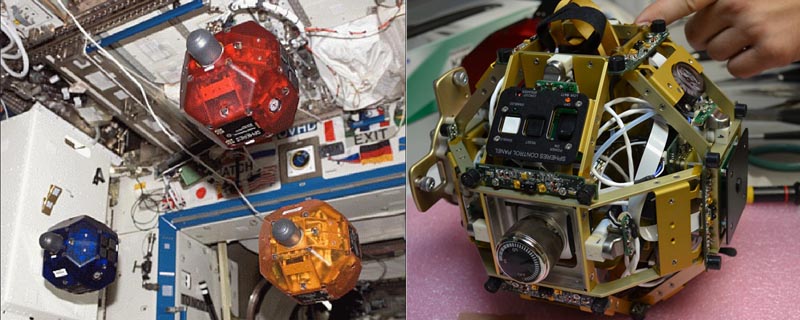
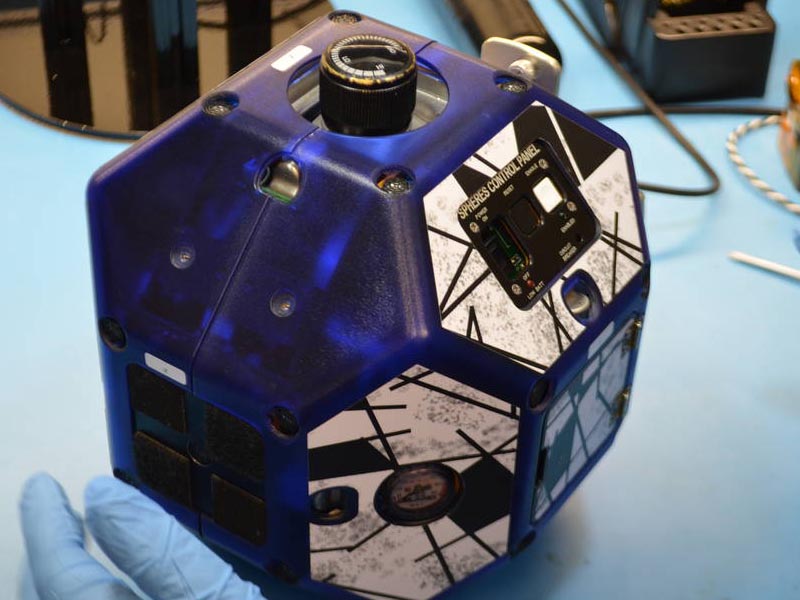
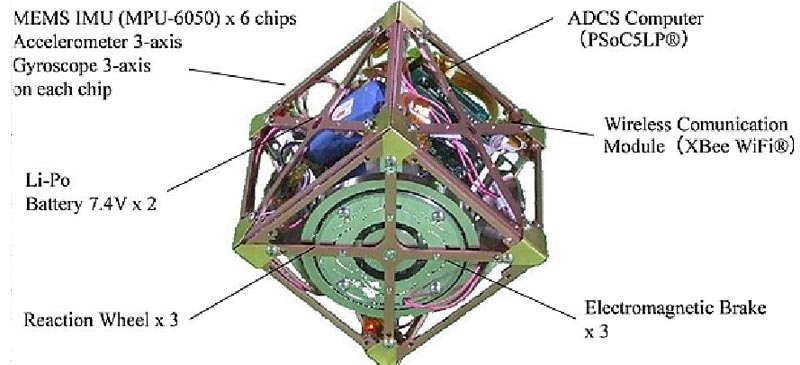
1.1。 领域(美国)根据护照,带有首字母缩写的游戏:SPHERES(同步定位保持啮合重定向实验卫星)。 NASA的财产。 由DARPA资助在麻省理工学院创建。
重量:4.3公斤。
尺寸:22厘米
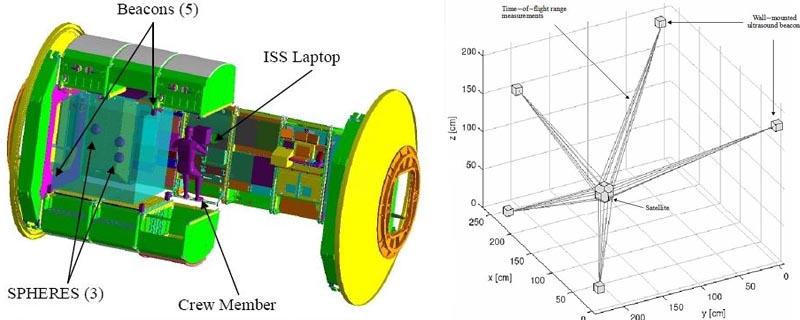
 (图形资料来源:NASA,JAXA和ESA。)
(图形资料来源:NASA,JAXA和ESA。)几架相同的无人机,其中三架落入轨道:蓝色,红色和橙色。 First Blue,早在2006年。 再过一会儿,其余的都改进了固件。
从我们将“无人机”放到地球上的意义上讲,它们并不是真正的无人机,主要是指业余(四轴)或专业(六轴,八轴)直升机。 球体不是直升飞机。 他们没有螺丝,但是有喷嘴。 纯喷射推进器,压缩气体。

量筒为170 g。 气体从中分配到12个喷嘴。 最大加速度:运动时为17 cm / s
2 ,旋转时为3.5 rad / s
2 。
但这恰恰是最大加速度,在正常操作中,加速度几乎不相同。 在实际实验中,球体的运动
非常缓慢 。
全面通信:频率为868和917 MHz的无线电信道。
报警:红外信号。
传感器:超声波接收器。
没有摄像机,但提供了主体套件安装座。 最初,VERTIGO单元用作摄像机,其基础是用于创建立体图像的两个摄像机。 然后,当智能手机普及时,只有智能手机。

最初,导航是在超声波接收器上进行的。 这些甚至都不是距离传感器;它们本身不发出超声波。 为此,在美国实验室内固定了5个信标。 当您需要确定位置时,Sphere会发出红外闪光。 这是信标的信号。 它们轮流以不同的延迟发出超声波信号。 球体捕获了这五个信号。 初始的不同延迟是必要的,这样就不能保证信号重叠,并且分析尽可能简单和可靠-因此,信标甚至没有不同的签名。 信号的实际到达时间使您可以计算与从球体到每个信标的距离相关的辅助延迟。
一切都尽可能简单。 也许是因为学生开始成长,而这却遭到了上级的监督,使他们想起
了著名儿童电影中的一
集 。
由于宇宙辐射,开发人员认为无人机的电子部分是最脆弱的地方。 但是无人驾驶飞机在该站花费了十多年的时间,并且向喷嘴分配气体的系统出现了问题。 但是,事实证明,在“龙”号上发射的“蓝色”修复期间,它已经在地面上。
类似的症状(不是很严重)超过了Orange,但到目前为止它仍然存在。
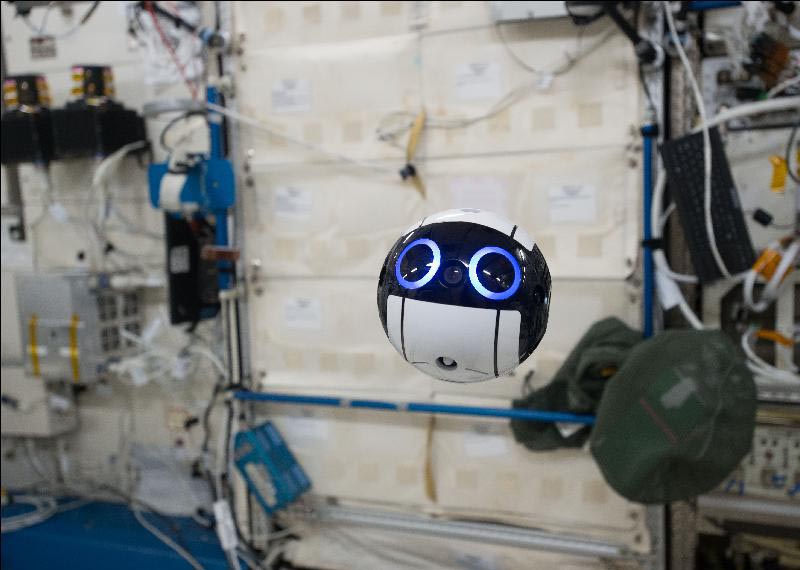
1.2。 球(日本)Int-Ball(内部球形摄像机)。 JAXA属性。
重量:1.4公斤。
尺寸:15厘米。
这种飞行的mimimi飞机于2017年夏天交付给国际空间站,但仅在一年后,当一名日本宇航员在该站时才开始被认真使用。 但是,正式和现在,球的状态仍然需要重新调整。
移动时有12个小通风口。 但是对于旋转-已经有大量的回旋陀螺。
该工作站的笔记本电脑之间可以直接连接,而无需拐杖(例如Spheres)。
您可能认为眼睛里有摄像机,但没有。
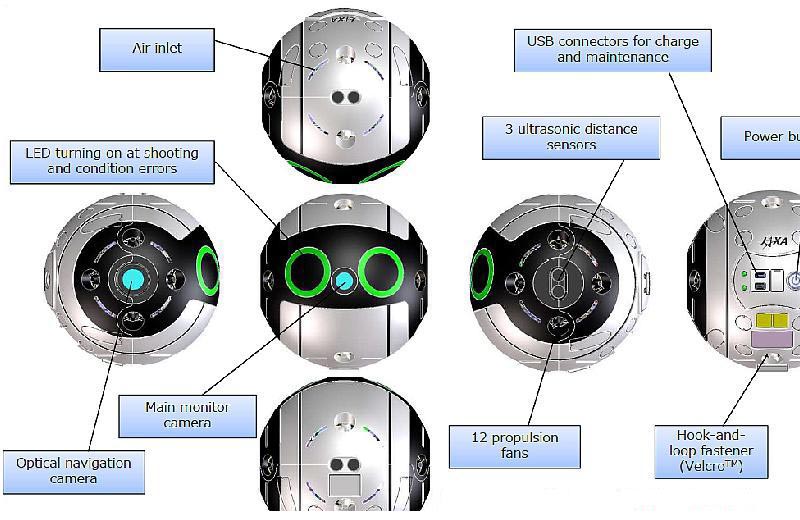
家用便携式摄像机在鼻子上。 眼睛只是指标。 它们实际上是灰色的。 当它们发出蓝色光时-这表示主摄像机正在工作。 如果系统发生故障,它们会变成红色,并且球的视野会变得出乎意料地激进。

这辆自行车已经在行走,这是鲍尔第一次让没有想到这件事的美国宇航员感到害怕。
在右舷有一个辅助摄像机,导航。 对于她来说,在日本实验室中放了两个标记物(那粉红色的vyrviglazno-粉红色斑点)。 通常它们位于模块的不同端,一个低于阈值,另一端位于微型网关的盖子上,但可以自由移动。
球的左侧是超声波距离传感器。
与时髦的麻烦有关,要强调的是身体部位是在打印机上打印的。 (然后将它们抛光并抛光很长时间,奇迹就不会发生。)
在离线模式下,球尚未起作用。 它的运动由日本MCC中的两名操作员控制。
每月更新一次
视频日记 。
1.3。 西蒙(欧洲,更具体地说是德国)CIMON(乘员互动移动同伴),以纪念
教授 西蒙赖特 。 在ESA的主持下,由德国航空和航天中心在德国空中客车工厂制造,IBM参与其中。
重量:5公斤。
尺寸:32厘米

今年夏天交付给国际空间站“龙”号。
尚未提交详细描述,只有最一般的数据:14颗螺钉。 鼻子上有一个监视器和一台摄像机,侧面还有两个辅助设备。

Linux系统。 IBM制作了
Watson的便携式版本,该版本不需要数十台服务器或地面连接。
如果突然之间,您认为这些无人机是“ IBM的AI!” 他们可以正常机动,现在终于
看起来至少有点
酷了 -这是
他在空中滑梯上的镜头 。 在第一个测试中,事实证明他的计算能力比欧洲飞行实验室的非惯性残余能力弱(自豪地称为ZERO-G)。
按计划,德国亚历山大·格斯特将于10月份开始与他合作,因此他的声音和面部识别功能将被监禁。 而在冬天,西蒙将被放回地面。 但是,显然是由于
该站被邪恶的小妖精所
感染 ,所以截止日期已经改变了。 您可以在
Gerst的Twitter上找到有关开始
的信息 。
2.分析好吧,为什么在国际空间站上无人机?
创作者发表了仪式性的言论,代理机构也发布了新闻稿,但很明显,在大多数情况下,这都是官僚主义的闲谈,在这里,前景像青蛙一样through肿,在地毯下注意到了不舒服的问题。
2.1。 什么是球体?首先,让我们尝试了解:设计是否合理?
国际空间站内有空气。 但是球体的推动者使用了纯粹的反应原理。 这意味着当无人机运行时,会不断浪费资源。 合理的问题是:如何补充该资源? 也许您可以将无人机直接加油给国际空间站(即从实用的角度来看,没有浪费资源)? 也许有些压缩机和无人机一起被运送到了国际空间站? 不行 无人机使用可互换的钢瓶和液化二氧化碳。 用在无人机中后,必须将它们放低到地面,在那加油,然后再次升到国际空间站。
此外,即使无人机的电源也不在电池上(看起来很明显),而是在电池上。 一次性AA电池,每节两节8包。 每次使用前变新鲜,大约2个小时就足够了。 之后,它们只能被送到地面,而无人机则需要新鲜的无人机。
这样一个奇怪的决定怎么合理?
也许是这样的想法,尽管无人机可以在国际空间站内部工作,但它可以在真空中模拟其外部的运动? 没有空气的地方? 或者甚至在ISS降压的情况下还打算这样做? 然后,他可以在真空中移动到站内,就像带螺丝钉的无人机无法移动一样。 可能会派上用场。 查找泄漏的常规方法是通过声音,但是这种方法仅在泄漏很小且空气缓慢逸出时才有效。
但是创作者们自己说,这种无人机并非用于真空环境。
那么,也许我们会在实验中找到使用这些无人机的原因?
环实验
两个球体,每个球体都添加了一个带有电感器(环)的车身套件。 通过这种形式,无人机可以进行磁性相互作用-相互排斥,吸引并相互扭曲。 彼此非接触式充电。
有什么想法。 完成大多数(成功!)太空任务的原因是燃料已耗尽。 该设备制定了其基本程序,并且仍然可以正常运行,可以使用并且仍然可以使用-就是说引擎中没有更多的燃料了。 无法进一步纠正飞行路线。 更糟糕的是,不可能卸下陀螺仪,并且该设备将无法再保持天线对大地和面板对着太阳的方向-与大地的连接,失去动力...是否可以不定期消耗推进剂而做? 如果将多个“环”放置在多个环上(例如,在ISS的表面上),则可以在它们之间尽可能多地驱动一个小型卫星,而无需花费任何燃料-足够的功率,这通常不是问题。
就普通单词而言,这很有趣。 但是很难想象一个真正的用例-在何处以及出于什么实际目的需要?
此外,实验本身以进行的形式是完全没有用的,因此基本工作都在其中完成。
它有什么作用? 那是为了什么?
眩晕实验自2008年以来,开始提出建议和尝试对Sphere进行升级,以便其导航不是基于信标,而是基于视频分析。 在2010年,该项目将使用相同的DARPA进行融资,其中包括无人机的这些要点。 似乎显而易见的,有用的想法是在三维版本中工作,而汽车自动驾驶仪的原型现在正以二维版本制造。 而且,在这个话题成为繁荣之前进行。
但这是一方面。 另一方面,采用Sphere形式的无人机最不适合这种情况。
即使您对Spheres非常慢的事实视而不见,但飞行的开始却浪费了人类时间(检查气瓶中的压力并在必要时进行更换;请更换新的电池组),并且飞行时间非常有限(经常更换气瓶和电池,以及从地面交付)?
“实验”光环
用引号引起来,因为项目是在无人机上安装了保险杠,您可以在上面悬挂任何其他物品。
如果将无人机至少在车站内用作常规无人机检查员,那可能会有些道理。 但是不能像TTX那样那样使用Sphere。 那么,那是为什么呢?
但是为了什么。 例如,“对接单元”悬挂在车身套件上,而无人机则相互对接。 这不是奇迹吗?
或另外一个:用绳子捆起来的两架无人机,看着一个人如何拉动另一个。 事实证明,这是对空间碎片捕获的模仿。 好厉害! 是不是
实验飞溅(晃动)
特殊的光束上连接着:末端有两个球体,中间有一个透明的气球,部分充满了液体。
球体用于扭曲,摇动,振荡等。圆柱体旁边的摄像头将发生在内部的物体取出。 使用了不同程度的填充,并且液体具有不同的性质。
显然,首先,这是一个比喻,当燃料箱发现自己处于接近零重力的状态时,会发生什么。 因此,实验是在真正的大型制造商的参与下进行的。
总的来说,这个实验看起来是最令人信服的。 是什么让我们使用保留呢? 以摇摆器和Spheres作为加速器的设计是一件非常笨拙的事情。 球体推进器的工作,尤其是随着时间的流逝,远非精确。 在安装过程中使用Spheres对实验的持续时间施加了严格的限制,不可能长时间且以自动化模式进行这些操作(使用Spheres进行会话-几个星期内需要几个小时)。 看来,如果真的有兴趣进行此类实验,可以在机架中分配一个位置,并在其中安装一个小型振动筛,以提高此类实验的效率。 而且,如果机架中没有任何位置,那么甚至:用圆柱体在圆柱体上绕制陀螺仪是否比将球体悬挂在其上的相当长的端部固定得多,就产生的加速度而言,这不是更合理吗?
也就是说,对于这样的实验是否需要球体的疑问仍然存在。 而且,以下所有无人机模型都未尝试过类似的操作,这为它们提供了支持。
那么为什么需要球体呢?让学生做实验-他们进入太空领域的经验和兴趣比国际空间站上特定领域的真正利益更重要吗?
还是陷入粘性的阴谋神学中,情况恰恰相反:DARPA资助了该项目,以使英勇的俄军混为一谈? 就像,瞧瞧,有什么无助的原型卫星检查员正在向我们提出……如果我们有很酷的卫星检查员,我们会资助这样的拥抱和哭泣吗? 我们没有卫星检查员!
还是仅仅是因为没有实际用途的NASA和DARPA的额外官僚被迫创造作品的外观以证明其存在的合理性? 这仅仅是资金的“掌握”吗? 同时,正式填写宇航员的工作时间表是“我们没有白白带他们回去吗?”
2.1。 我们为什么需要一个球?在此,立即,非常清楚和非常有说服力地阐明目标。
让我们看一下如何安排国际空间站上的人员进行实验。
一个仍在地球上的人在教工作计划,并进行培训。 但是! 由于人们在国际空间站上被遗弃了六个月,而且几乎没有人,因此不可能使宇航员为他的每个实验做好理想的准备,并且要依靠已经使用这种设备多年的实验室助手的技能来做到这一点。 但是需要或多或少地,不乏味地进行实验,这是有时间表的。 因此,几乎每个实验都在MCC的监督下进行。 宇航员将照相机安装在支架上,瞄准他将要工作的地方。 “我的客户中心”不仅可以回答他的问题-还可以立即纠正如果他已经做错了事,而自己没有注意到。
当然,将摄像机固定在支架上并不是理想的选择。 有时您想近距离显示图片-他的手指下是什么。 有时候这真的很重要。 该实验可以推迟或取消,但是在预防或维修生命支持系统的情况下,无处可去,错误可能会导致很大的困难。 因此,您必须打电话给机组人员寻求帮助:一个正在工作,另一个正在拿着相机,拿下他的肩膀。
日本人声称,对相机进行大惊小怪最多需要10%的时间。
当然,在这里,这种说法是否不巧妙还不是很清楚-他们考虑了宇航员在工人内部的时间,或者包括了他们可能的一切:宇航员在空闲时间喜欢在舷窗拍照; 每个人至少在一次探险中录制一次视频,这被认为是一种很好的形式。 您需要维护视频博客并参与视频桥梁,因为出于普及目的/出于政治和图像方面的原因,视频桥梁是必需的。 因此,实际上,时间百分比可能有所不同。
但这并没有改变本质:为什么不释放这次宝贵的时间呢?
球被宣布为这种通用的运动相机,应该可以节省时间。
无人机在现实中像这样工作吗?Ball(如果将其与安装在ISS上的,具有良好镜头的成熟相机相比,则效果不佳)。 带有小镜头的紧凑型相机还能提供什么其他图片?
流动性甚至更糟。 Sharik玩味的局限性显然与再保险有关,特别是低估了螺丝钉的力量。 如果软件部分(图片导航和操纵)可靠且高效,则可以在将来更改此设置。 但这只是一个大问题。 如果我们以类似的“陆地”技术作为起点(在汽车自动驾驶领域正在做的事情),那么似乎这些专家和开发人员都没有参与其中,而JAXA的一切工作几乎都是由该领域的初学者完成的。
但是,最大的问题甚至没有。假设球能够自信地识别环境,并在其中准确地操纵。这足以使无人机成为一名助理操作员,例如,另一个带摄像头的机组人员吗?无人机的所有者很清楚答案。当给定明确任务时,自动驾驶仪表现良好:输入了轨迹检查点或设置了前导对象。就汽车而言,这种用例非常方便。就无人机而言,还需要做更多工作-在完善飞行任务时与操作员进行互动,包括事先未指定的着陆条件(记住所有有趣的,无聊的,没有传给机主的无人机故事)。对于国际空间站上的助理无人机(实际上是助理,而不是新闻稿),它首先需要与人互动。便捷的互动。在表面上不是清晰的口头命令或像交通管制员这样的正式规定手势。而且,在两个真正的人一起做某事的情况下。您可以根据注视的位置预测手势开始时其他人的动作和意图,这是令人鼓舞的命令,可以快速浏览一下,以及其他模仿行为反应,这些反应在真实情况下很明显,并且很难正式化。但是要使其成为现实,无人机必须配备非常智能的AI-不仅能够机动,而且能够了解正在发生的事情。否则,它的使用将无济于事,而是宇航员在完成主要工作时必须牢记的另一项艰巨任务。只会有过多的负担,刺激和错误。这种交互的发展现在还处于起步阶段,主要是因为在这种状态下,强大的AI得以发展。在不创建强大的AI的情况下,此任务充其量只能具有类似于当前自动翻译器的ersatz解决方案-相互错位,需要强大的AI以人的形式进行纠正。如果没有强大的AI,则需要以一种或另一种方式不断监视辅助无人机-并定期干预其行动! -地面操作员。2.3。这是西蒙!显然,Simon的开发人员了解这一点。他们还了解到,从经济角度来看,日本人与Sharik共同使用的计划(至少两名地球上固定雇用的专家,以节省一名宇航员10%的时间)是最好的选择。因此,提出了其他目标。Simon会毫不客气地跟随船东,成为他的语音助手,并收集数据以对船员的状况进行心理分析。就是那个建议采用已经在地面无人机中实现的技术。然后,给在轨的宇航员一个人造的(读,哑)语音助手-当他头戴式耳机的宇航员已经在MCC拥有现场助手时。像樱桃一样,在“火星500”等项目中使用更为复杂的方法,以主动形式对地球上所做的事情进行被动式修改。如果这不是全人类迈出的重要一步,那是什么?尽管如此,Simon仍然可以真正受益。只是与上述所有内容无关,对于新闻稿的编译者而言并不明显。2.4。太空修饰如果您仔细地观看来自ISS的视频,注意宇航员的行为,您会发现一件有趣的事情-即使事先了解物理原理并了解零重力是什么,也不是一件容易的事。一个有经验的事实:零重力的人比大而轻的东西要容易处理大块的东西。当您放下一件小东西时,困难就开始了。看来是什么问题?
好吧,只要将某物“悬空”,它就会挂在那里。零重力!它比地球掉落更方便吗?在地球上,东西可能掉落,在放开东西之前,您需要找到放置它的可靠支持?问题在于,一个人不能以足够的准确性“把”东西扔到空中。在地球上,我们习惯于将物体放置在不同的表面上,但总是在重力作用下放置。他放开了-重力将力推到了表面,并且摩擦力不允许向侧面移动。有一种幻想,一个人本可以如此精确地使事物静止,因为他理想地控制了自己的运动和施加的力量。在零重力下,这种幻象会很快消失。事实证明,如果一个人想将某物“悬空”摆放在桌子上,那将不再起作用。即使一个人非常努力地让对象在空中静止不动,松开手并非常小心地抽出手,对象仍然会以很小的残留速度移动。而且,如果一个人放开了一点小东西,例如走路,却没有太多的关注……乍一看,事物的速度并不是那么重要。但是它是恒定不变的,不会随处可见。在短短几秒钟内,事实证明该物体超出了宇航员可以达到的极限,只需伸出他的手即可。并且需要一些解决方案。要么放开东西,但然后您必须全身挥舞着它,而不仅仅是动手,否则您需要立即抓住它并将其放回原处。 (例如,修饰平板电脑 -注意力不在讲话者的脸上,而是在他的手上。)最好坚持下去,永不放手。但是,如果您想同时与多个对象进行交互?您不能将其中一项挂起超过几秒钟。您经常必须返回到该主题并“转移”它,然后飘回。如果该项目是一台平板电脑,您正在屏幕上观看某些东西,并且它的相机应该可以拍摄您,那么问题是,除了剩余速度外,还有一个剩余转速。平板电脑不仅会慢慢漂浮,而且会慢慢远离您。所有这些导致了这样一个事实,即宇航员要么将手中正在处理的东西握在手中,要么进行空间修饰-他们不断纠正悬在空中的物体。即使在观看了大量的ISS广告后,许多航天迷也没有注意到:几乎所有在站上的物品都带有粘性标签。在“桌子”,“工作台”,车站的墙壁以及某些模块上到处都是Velcro母亲的碎片,整个模块都被它覆盖了。除维可牢尼龙搭扣外,车站的各个位置还有一些橡胶网袋。还有一些附着在登山扣上。用于笔记本电脑和相机支架。所有这些都是出于相同的目的-以某种方式解决了空间修饰的问题。从这个意义上讲,西蒙具有独特的有用功能:它可以用作可以“空中”播放的屏幕。接下来,西蒙本人将同时保持宇航员屏幕(和照相机)的位置和方向。他不需要修饰。问题是,是否值得为此发送一个笨重且庞大的物体-而不是可以随身携带平板电脑的小型紧凑型无人机?2.5国际空间站上无人机的主要问题根本不需要国际空间站上的无人机-它们没有问题。更准确地说,可以找到适合他们的任务,但是要解决这些问题,无人机不应成为“我们正在塞满所有时髦的东西,但对某些东西有好处”的玩具,而应关押特定的功能。3.未来的漂亮无人机在原则上可以在国际空间站上使用无人机的实际任务中,现在有两个:1.拍摄宇航员的工作,2.从太空修饰中拯救人们。如果您正在寻找解决方案特别是针对现在的这些任务-您需要使用可以立即工作,高效工作的东西,完全解决既定目标。并且不要做任何昧的事情,因为“我们正在开发技术方法,以便在将来的某天……”这一事实是合理的。3.1。合理化建议现在和不久的将来,国际空间站上的无人机不具有:-严重依赖于AI的开端(因为他们太残迹);-使用视频信号识别进行导航(未调试到最后,在一切受控制的封闭环境中冗余);-用最优质的ISS上已经可用的专用设备的无用模拟物来加重设计负担(没有内置摄像头,内置平板电脑,没有超出最小设备控制器的处理器)。无人机只能是实际的工作工具-陀螺仪,风扇,电池,无线设备,仅此而已。 (最大数量仍然是智能手机类型最小的相机中的几个,并且只有这样,它们的视频流才能通过图像传输到机架中的处理器单元,仅在此处进行处理。)此外,所有细节都尽可能地小。如果以前的无人机具有篮球剑,手球和沙滩小武器的尺寸,那么理想的ISS无人机应该小得多,力争达到网球的大小。那就是:处理器的容量被转移到一个科学机架中,这样无人机就不会承受巨大的额外负载(不要忘记,除了计算模块本身之外,无人机还被迫为该模块供电!)。为了进行导航,请使用原始的Sphere方案,但采用相反的形式:无人机本身会发出两个信标一样的信号(从右舷和左舷),这些信号由固定在站模块角落的探测器读取,并通过延迟进行三角测量;连同无人驾驶飞机的内部数据(加速度传感器,电动机和旋转环的操作),这足以确定无人驾驶飞机的位置及其方向及其派生方式。在绘制路线时,使用现成的环境模型(ISS是一个大物体,但是很明显),用钢笔标记,并在需要时由操作员进行更新,而无需使用视频信号中的模式识别。为了控制环境,在无人机所在的模块中,将照片与附带的摄像机(不在无人机上)一起使用-此操作由操作员执行。如果使用神经算法,则仅用于解决已经足够好的低级辅助任务。无人机本身将信息处理到最低限度。它仅将其内部数据转储到机架中的计算机,并从中接收有关设备操作的特定说明。无人机上有安装点。异质的。这些是电动闩锁(闩锁的互补部分连接到无人机应使用的物体上),而只是该站标准的一块Mom-Velcro(在零重力下,即使有相当大的物体也足以将无人机连接起来)。无论如何,这应该是最小的安装座,比Spheres的巨大冗余保险杠小得多。当需要工作中的宇航员的视频时,会将摄像机固定在无人机上-全时大型摄像机/摄像机,位于国际空间站上。当MCC需要改变宇航员工作场所的观察角度时,无人机会缓慢拖曳并转动它。必要的操作是在地面/机架式计算机上计算的,无人机本身仅接收发动机的基本订单。因此对于宇航员来说,在科学机架中为无人机的处理器单元分配空间的同时,这确实是一种缓解,而不是不必要的头痛,还应该分配用于其坞站的空间-这样就可以像在吸尘器中一样进行停车和充电。最好不要只用无人机,还可以与旋转木马一起工作:从宇航员的角度来看,这架无人机看起来像是带电的,只有偶尔有复制品出现在工作的无人机旁边,它们之间是(自动)转移被拖曳的物品,然后将用过的无人机取下来充电。 。除了作为摄像师外,类似的设计还可以使用无人机来对抗美容。像相机一样,无人机可以保持与其连接的智能手机/平板电脑的位置和方向。将该屏幕拖到主机后面;当宇航员在平板电脑屏幕上戳时无需与另一个朋友握住它,即可补偿后坐力。或者,在维修工作中,将飞行包或小“桌子”“空中”“保持”在空中,并用魔术贴和小物件和紧固件的磁铁,按他认为合适的方式放置在宇航员旁边—无需每次都拉直缠结的袋子或除去必要的东西将安全带扣在皮带上,然后固定在皮带上,依此类推。也就是说,对于其他事物,它应该只是空中限制。它不是某些抽象“科学仪器”的载体,而是真正在日常生活中经常使用的那些对象的载体。随着这种方法的进一步发展:最好不要想象甚至没有几架无人机在一个宇航员附近轮班工作,而是一整个团在传送带上工作。站点的每个模块中始终有几个实例,这些实例无需特殊的初始化过程即可立即执行。在后台,它们开始推动,因此它们会冻结并不会旋转,这是宇航员旁边的物体,如果这些物体是从手中释放的,但没有用维可牢尼龙搭扣粘在墙上/否则就没有固定好,并且人的注意力显然分布在几个这样的物体之间。3.2。接下来是什么-实际上?无人机在国际空间站上以微型出现的顺序反映了国家的技术发展水平。领导人做点什么,然后其他有竞争能力的人被拉进来:首先是美国,其次是日本,德国。。。很明显,即使在这种微型竞赛中也不应指望俄罗斯。事实证明,现在是美国回合了吗?考虑到他们的经验,结合合作伙伴的努力,美国航天局现在是否应该将这场竞赛带入一个新的技术阶段?显然,那里的计划确实很慢。至少NASA进行了一次头脑风暴,宣布了各种黑客马拉松的公开比赛。不幸的是,在此类竞赛中提供的解决方案因对ISS的条件,问题和任务的错误成见而被破坏。概念是用心做,但没有思考,就本着“让无人机盲目我们所能,突然因为某种原因它有用?”,这是一个典型的例子。