
接收到i索引的RealSense 435摄像机的更新型号看到了光芒。 它的特色是内置惯性传感器IMU(惯性测量单元)。 英特尔实感这个名字对您没有说什么吗? 那么这篇文章是给你的。 该技术的发展在公司的博客中有如此详细的描述,您可以在不超越Habra的情况下讲述其故事。 我们可能会这样做,因为最近RealSense并未透露听到的声音-尽管这很不公平。
 具有Intel Perceptual Computing SDK支持的创意相机。 2013年
具有Intel Perceptual Computing SDK支持的创意相机。 2013年自2000年代初以来,英特尔一直在开发3D成像技术。 RealSense这个名字
出现在2014年 ,取代了以前使用的
感知计算 ; 然后
是英特尔实感SDK和原型相机。 3D相机的工作原理在于同时形成两种类型的图像:普通的RGB帧和使用红外发射器和传感器获得的深度图。 富含深度数据的图片可用于操纵和分析所描绘的对象(例如,分割背景或移动焦点),以及用于使用面部表情,手和手指运动,手势来控制人机系统的自然界面。
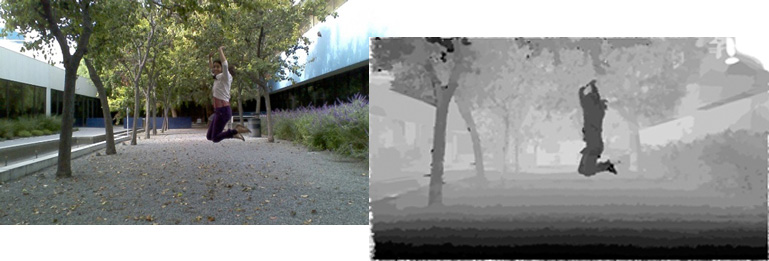 RGB照片和深度图
RGB照片和深度图在接下来的两年中,英特尔在各个方面都积极推广了RealSense。 定期举行
开发人员竞赛 ,发布了大量
培训和参考资料 。 2015年,发布了两款RealSense串行摄像头:
前F200和后R200 。 在这种情况下,我什至进行了个人检查:在2016年的新年假期中,我有机会
在家中测试了这两个相机 。 曾计划在笔记本电脑,
智能手机和
其他计算机上实施RealSense,但随后一切都仅限于PC的摄像头。
 英特尔实感SR300相机。 2016年
英特尔实感SR300相机。 2016年时间的流逝,软件的改进,新相机的出现首先出现在
第二代,然后是
第三代。 每次
引入新的改进 :确定深度的准确性增加,易于使用,出现了新的识别功能。 英特尔继续
与开发人员互动,并从
开发人员那里获得反馈。 在博客上,我们积极发布了
RealSense SDK上文章的俄文翻译-这是有关RealSense俄文的少数信息来源之一。 实际上,这是今天的事实。
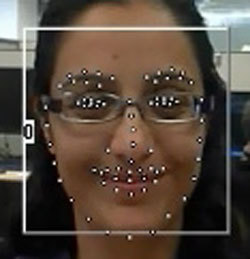 英特尔实感SDK 1.0最多可跟踪一张面孔的76个关键点;在将来的版本中,点数会增加
英特尔实感SDK 1.0最多可跟踪一张面孔的76个关键点;在将来的版本中,点数会增加当前,与今年早些时候发布的英特尔实感D400摄像机系列相关。 该系列包括两个摄像头:D415和D435。 D415可以提供更清晰的图像,但是速度较低,最小距离更远。 D435更适合AR / VR应用,因为其全局快门可更好地应对快速移动的拍摄对象。 表中给出了摄像机的更多详细特性。
| D415 | D435 |
|---|
| 申请书 | 室内/室外 |
| 深度确定 | 双红外光束 |
| 快门式 | 滑行 | 全球性 |
| 像素大小 | 1.4 x 1.4微米 | 3 x 3微米 |
| 深度场大小 | 63.4°x 40.4° | 85.2°x 58° |
| 深度场分辨率 | 1280 x 720 |
| RGB流选项 | 1080p @ 30帧/秒 |
| 深度范围 | 0.16-10 m | 0.11-10 m |
| 相机尺寸(宽x深x高) | 99 x 20 x 23毫米 | 90 x 25 x 25毫米 |
现在,D435摄像机已经过现代化改造-如前所述,它已经添加了6轴惯性IMU运动传感器。 尽管更改很小,但无论如何都不能认为它们不重要,因为它们为RealSense开辟了新的领域。 如果以前通常将照相机假定为静态物体,那么现在将位置和运动数据添加到3维图像中-这本身就很有价值,而且可以提高确定深度的准确性。 在移动物体(如无人机或机器人)时,RealSense变得更容易使用。 反过来,智能移动设备获得了“第三只眼”,这使您可以实现根本上的新功能。 此外,IMU与
ROS (机器人操作系统)框架一起使用,因此可以与所有与ROS兼容的机器人平台一起使用。
英特尔实感D435i现在已开始
预购 ,将于12月3日开始发货,目前价格为199美元。