无论如何,WX-Mouse都是具有独特功能和优质传感器的鼠标的创造。 在本文中,我将告诉您如何在不常见的情况下制作WX鼠标-Nova Slider 600。
Nova Slider 600鼠标有一个不寻常的情况。 USB电缆不仅位于人的手中,还位于右侧。


特别令人惊讶的是USB电缆的横向插入。 最初我对此表示怀疑,但是当我在游戏中尝试使用鼠标时,我同意-此选项具有生命权-几乎没有感觉到电缆,甚至像是这种鼠标一样的橡树电缆。
“回到我们的羊群”-对于那些不了解W-Mouse项目的人,要说几句话,因此很清楚为什么应该完全重做一个工作正常的鼠标。
阅读有关W-Mouse项目的更多信息由
Walkie实施的W-Mouse项目及其对WX-Mouse的开发。
WX-Mouse的主要优点和功能:
- 传感器的精度-组装过程中的传感器,设置为最佳焦点的高度。
- 设置运动动力学-灵敏度与速度的关系。 提供相当宽的设置。 例如,您可以设置dpi和speed参数,以便在低速时,移动的精度是逐像素的,并且对于较大的移动(锐利的转弯),无需将鼠标摇动一半。 事实证明,高和低的圣萨...
- 使用过滤的功能以及自定义角度绘制的功能可提高设计程序的可用性。
- 显示传感器的视频图像 ,例如,它可以让您控制传感器的焦点。
- 滚轮滚动更快(方便翻动大页)。
- 将所有设置(8个配置文件)存储在鼠标存储器中。
- 8个配置文件,指示每个可自定义的RGB背光。
- 按钮操作模式Buss-keeper-提高确定按钮状态的可靠性。
所有这些使WX-Mouse成为独特的鼠标。
WX-Mouse的制作方法如下-采用串行鼠标的情况,它符合人体工程学的要求,并具有正确数量的按钮。 在这种情况下,将保留按钮和光学传感器(如果适用)以及背光和其他小物件。 其他所有东西-本机控制器,主板的小零件和不必要的零件都被扔掉了。 接下来,将WX-Mouse板插入盒中(可以将WX板和传感器组合在一起,并且在完全替换本机鼠标板时还有其他选择)。 之后,从传感器,按钮和背光灯到WX板建立连接,将WX-Mouse固件吹入控制器,并准备好WX-Mouse。
W-Mouse鼠标与其他鼠标的不同之处在于其独特的功能和高质量的工作。 为了说明这一点,我提供了一个评论,该人最近成为WX-Mouse的骄傲拥有者-
指向评论的
链接 。
W-Mouse使用Avago的一系列“游戏”传感器-ADNS 6010、6090、3080、3090、9500、9800
WX-Mouse使用顶部传感器PMW-3360和PMW-3389。
为了直观地展示WX-Mouse的功能,建议您看一下设置它的程序窗口:
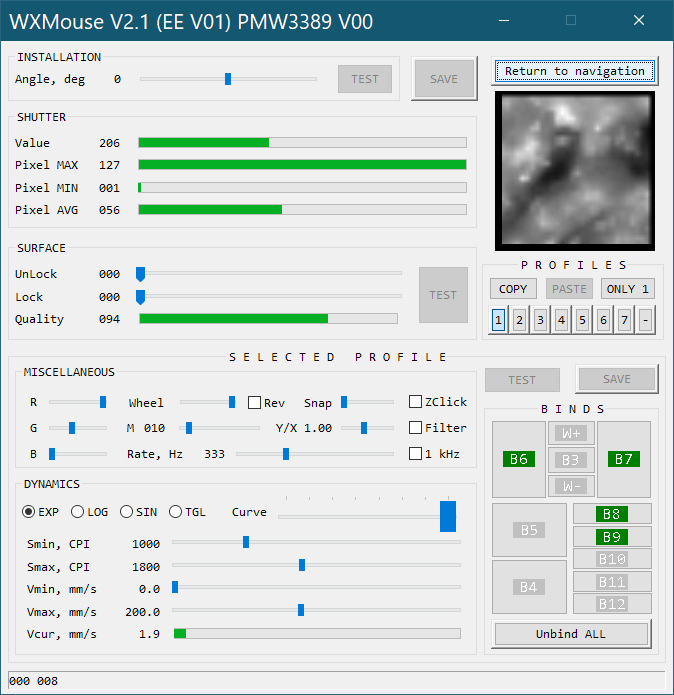
例如,您可以用鼠标作为笔来书写。
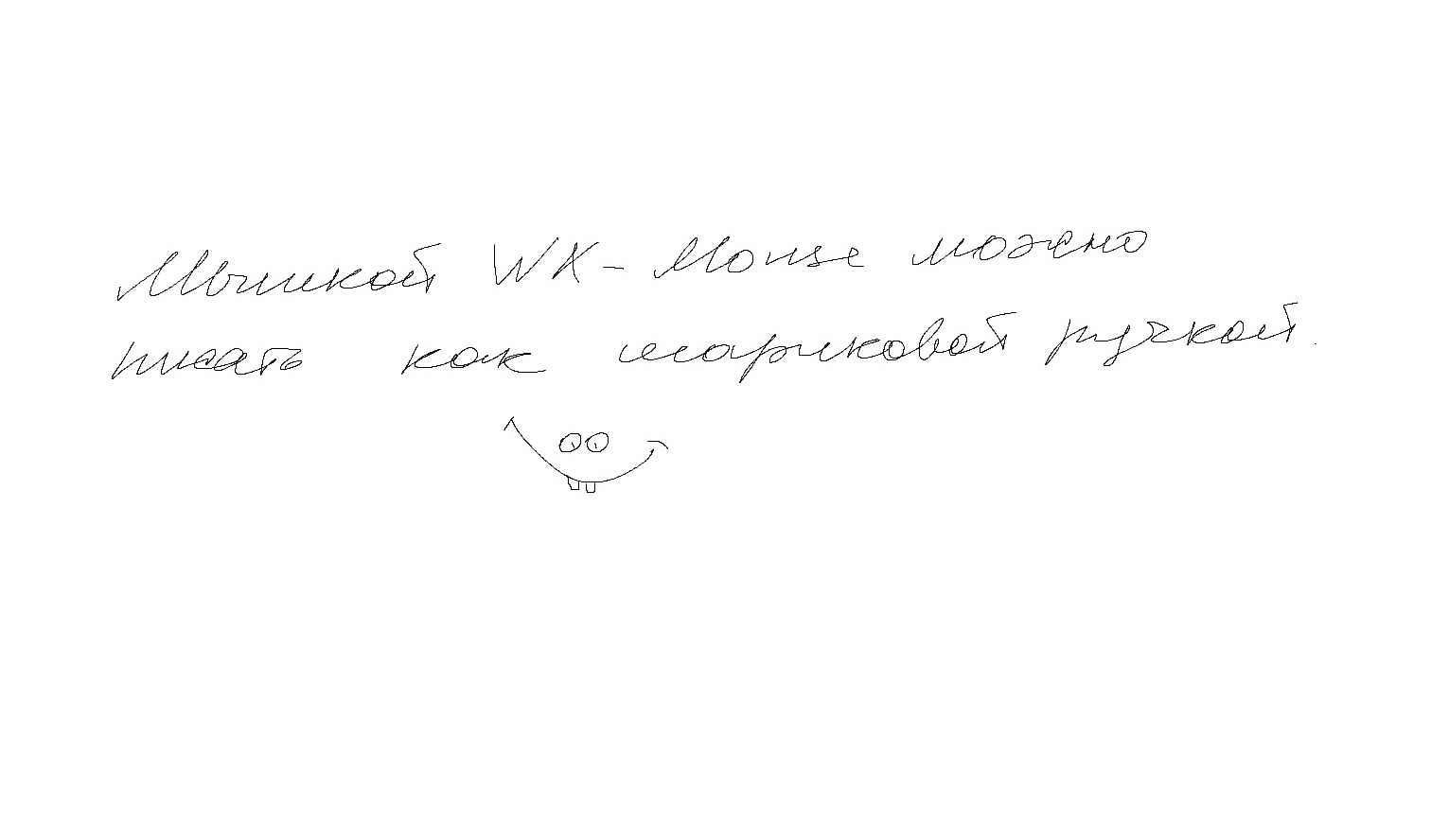
图片是用油漆绘制的,比例为100%,屏幕上字母的大小为4-5mm。
在会议上讨论了该项目,主题为“
激光光学传感器-W鼠标项目” Nova Slider 600 WX-鼠标转换行动计划- 组装带有atxmega32a4u控制器和传感器,控制器固件的WX板。
- 分析鼠标病人的身体,以决定如何,以什么顺序进行重做。
- 改进了鼠标底部,以安装PWM-3360传感器的镜头
- 在机架上安装WX板。
- 监视传感器的高度。
- 更改鼠标的主板。 更换欧姆龙D2FC-FK(50M)的按钮
- 更改鼠标的侧板。 更换欧姆龙D2FC-FK(50M)的按钮
- 匹配的RGB背光。
- 连接器接线。
- 最终组装。
1. WX板的组装按以下顺序进行:
-首先,焊接3个稳压器。 之后,电路板连接到+ 5V,测试人员检查所有三个分支都工作正常。
-控制器是密封的-atxmega32a4u
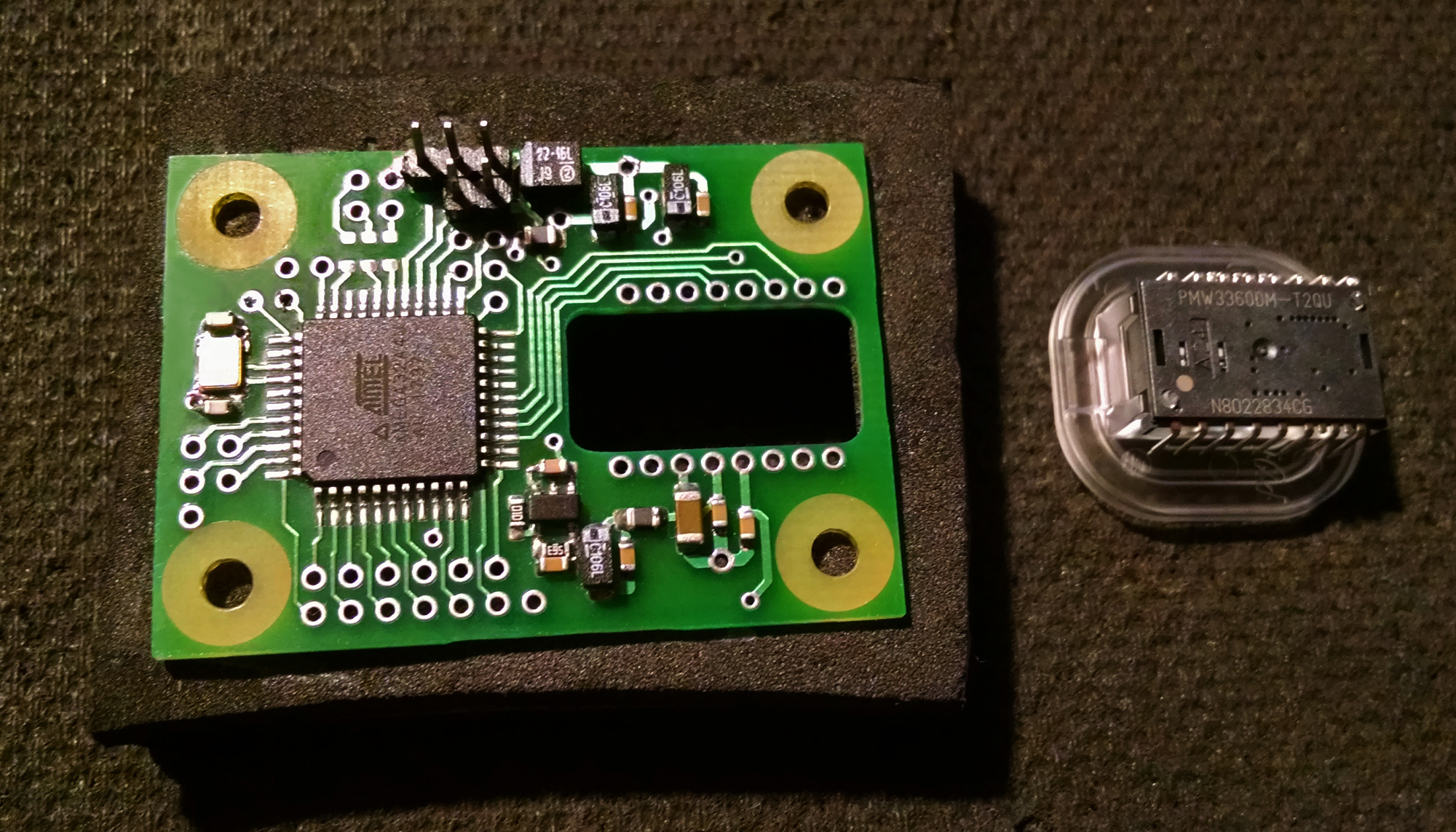
-我们用编程器对控制器进行刷新,并从编程器板上取电。
-我们通过USB将WX板连接到计算机,并将WX-Mouse固件刷新到控制器中。 这已经由常规闪光灯完成。
-焊接传感器。 焊接期间,有必要检查传感器在板上的紧密配合以及水平面上是否有歪斜。
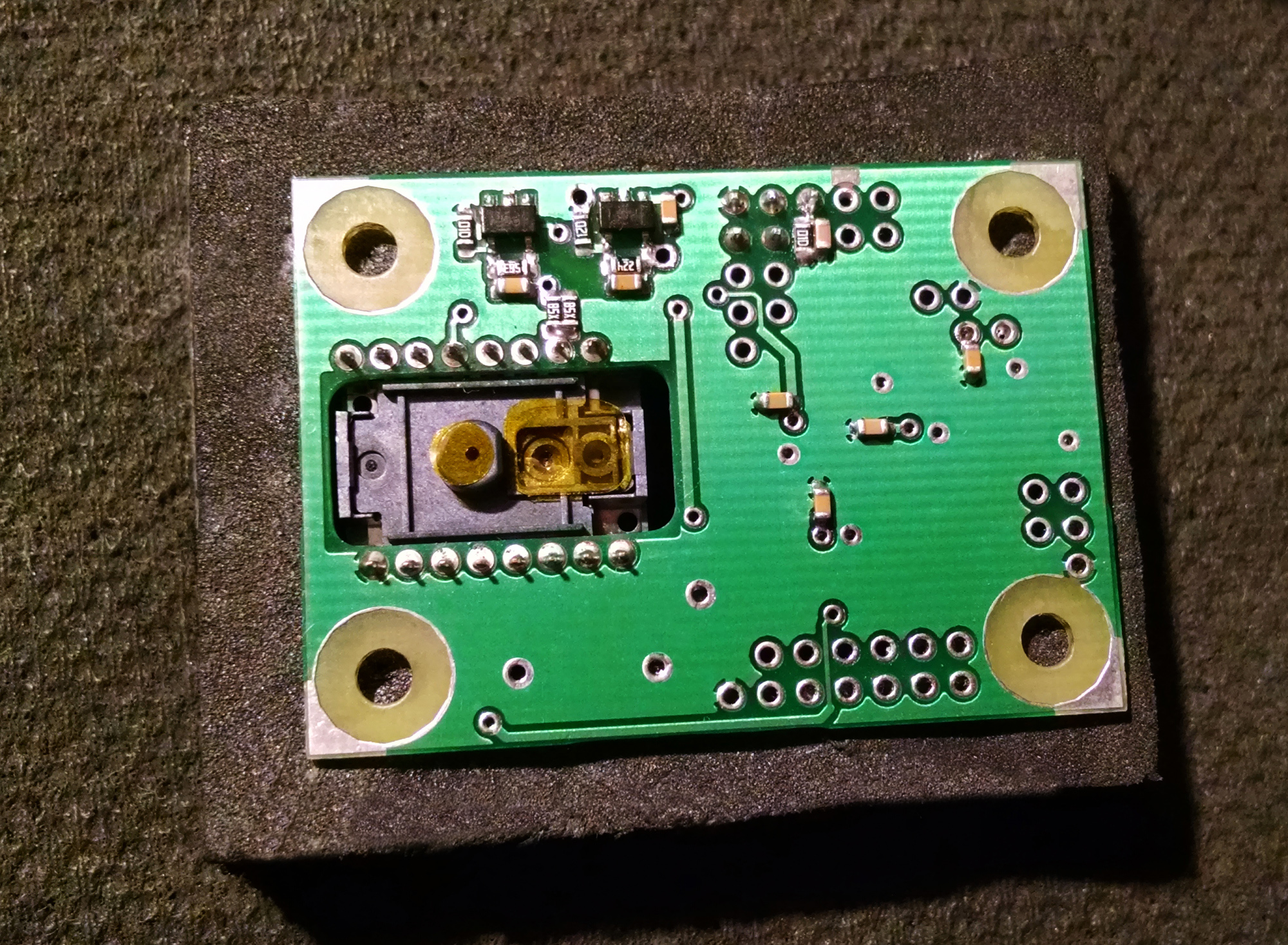
-我们放好镜头,将其连接到计算机,并确保组装好的WX板能够正常工作,就像鼠标本身一样,即 将板子放到表面,然后观察光标的移动。
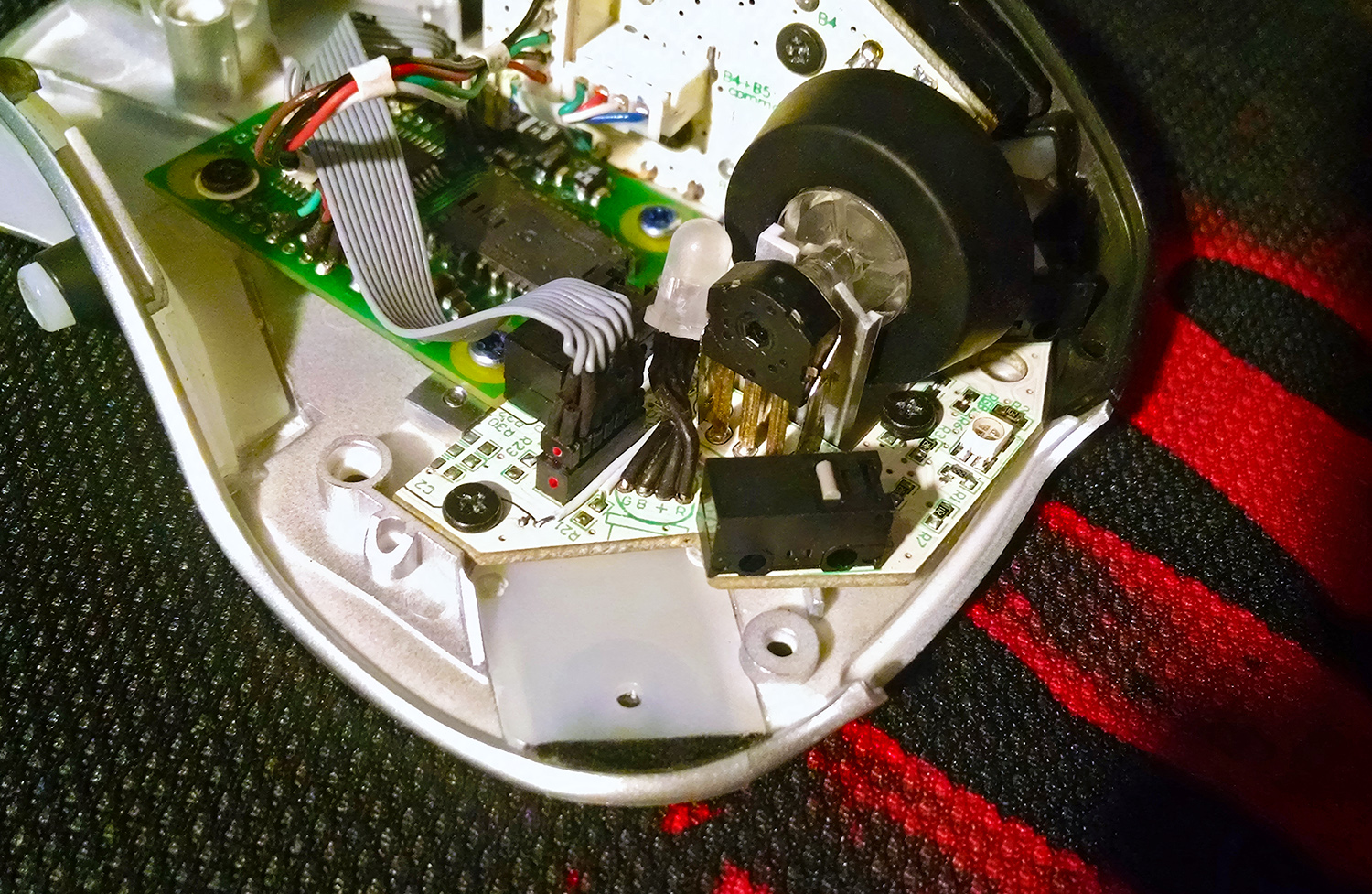
2.这就是我们的病人内部的样子
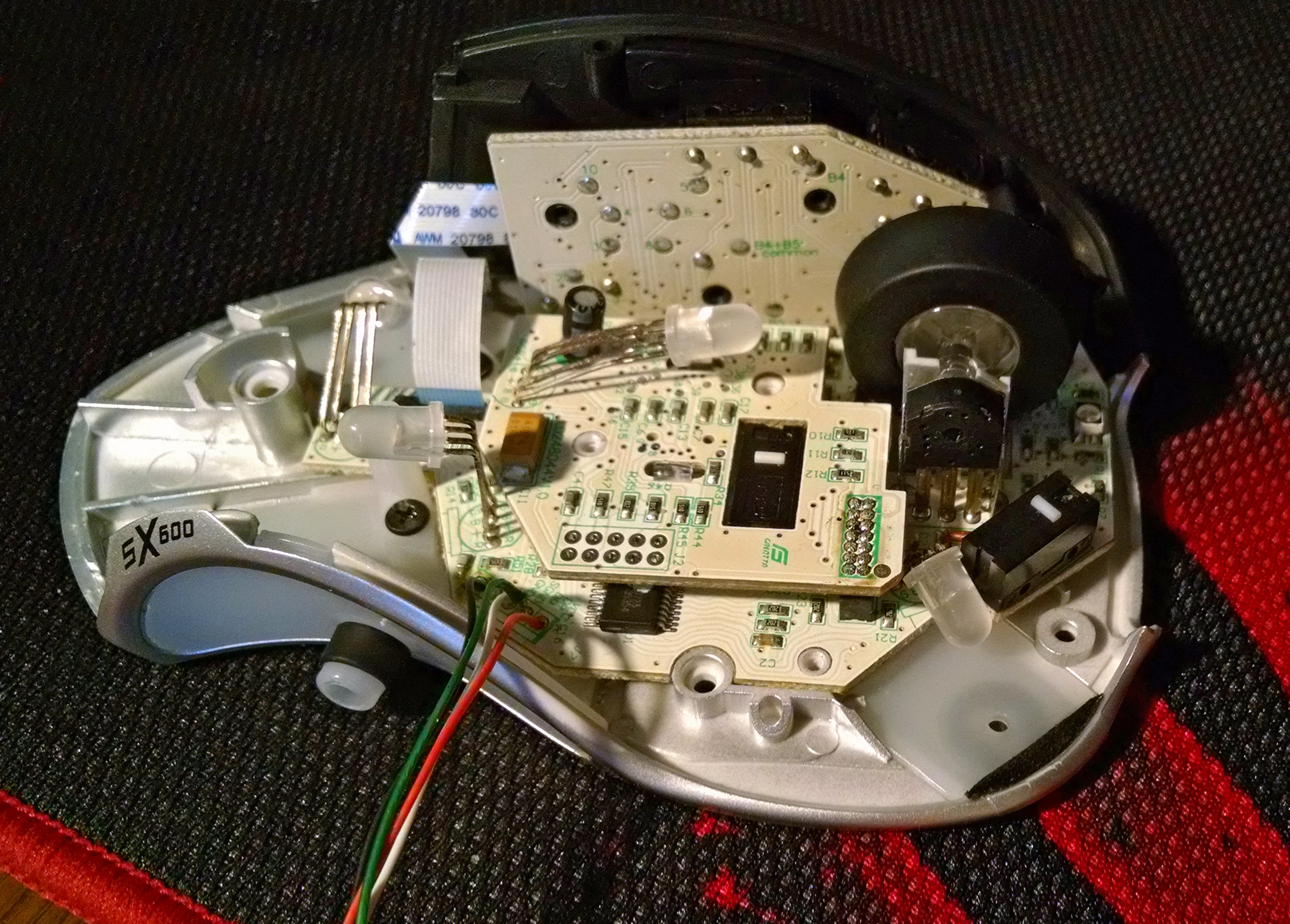

如您所见,设计是“两层”的,但是我们只对主板感兴趣,因为 所有主按钮和车轮编码器如何位于其上。
由于将不使用大部分主板,并且此部分位于WX板所在的位置,因此我们会毫不留情地切割并丢弃主板上不必要的部分。 同时,主板上会剩下一小块,上面有三个主按钮以及一个附加按钮,其推动器显示在鼠标的背面。
可以看出,从传感器底部的孔到鼠标背面的附加按钮的距离很小,如果您使用此常规孔,则WX板不能很好地安装-附加按钮会干扰。 由于客户坚持使用规则的孔,因此决定将该按钮移到更靠近车轮的位置。
3.在大多数现代鼠标中,制造商将传感器放置在相同的高度。 该高度由从工作表面(垫)到镜片下表面的距离决定,为2.4毫米。
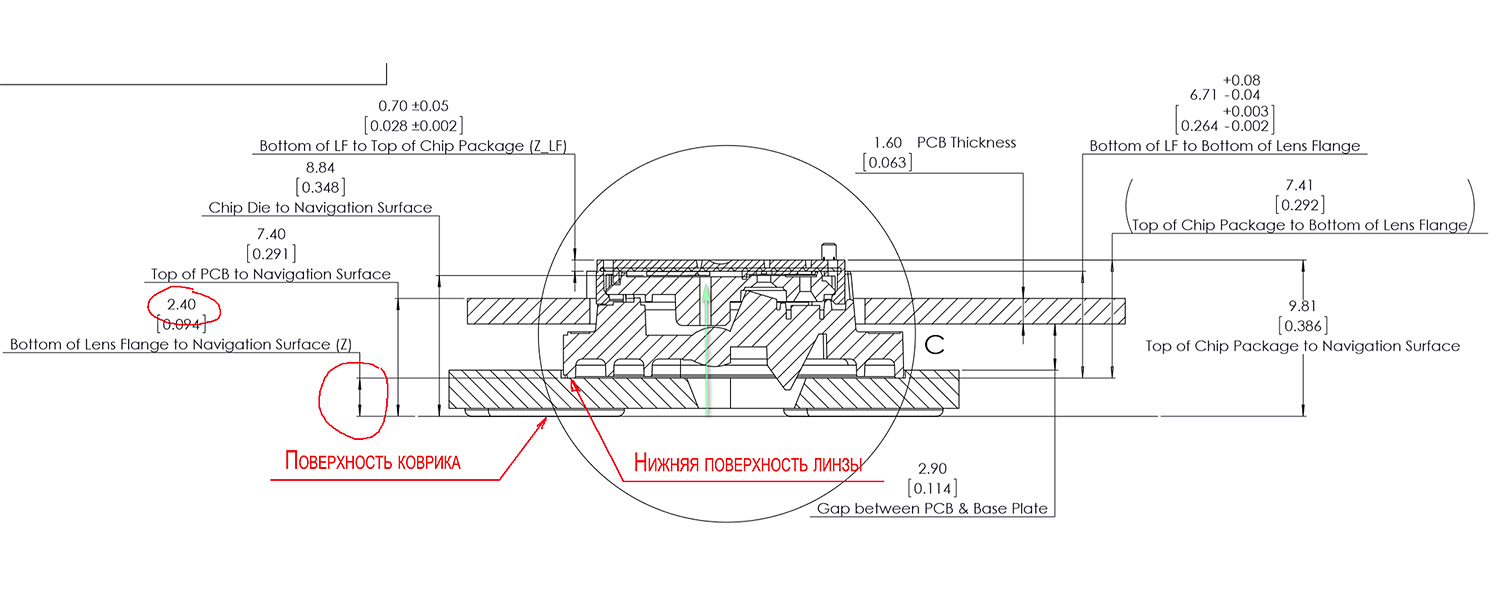
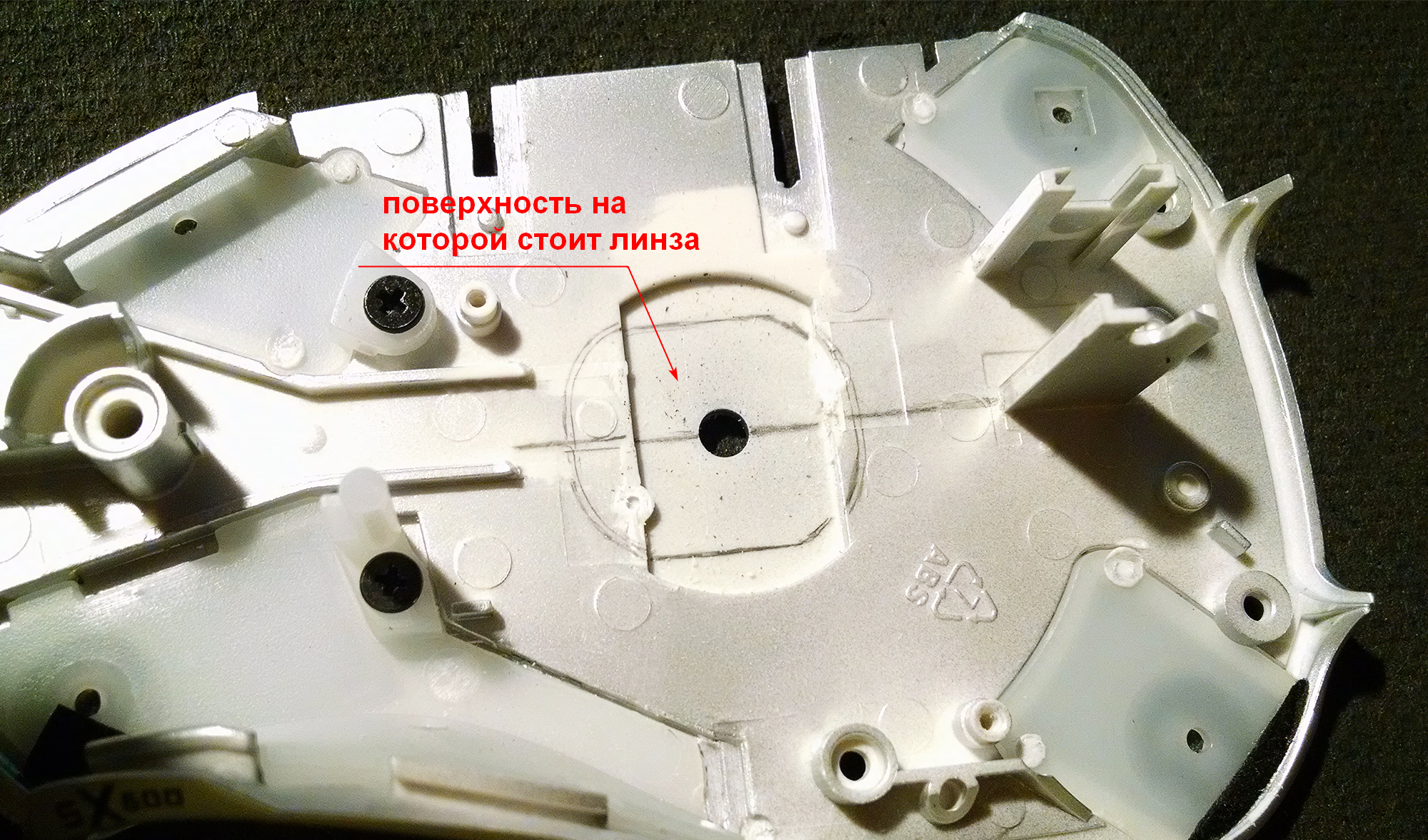
PWM-3360传感器的透镜具有其形状在图中轮廓用铅笔线标记的形状。
镜片原料的延展是使用dremel进行的,使用具有侧面切割边缘和平坦端部的喷嘴。
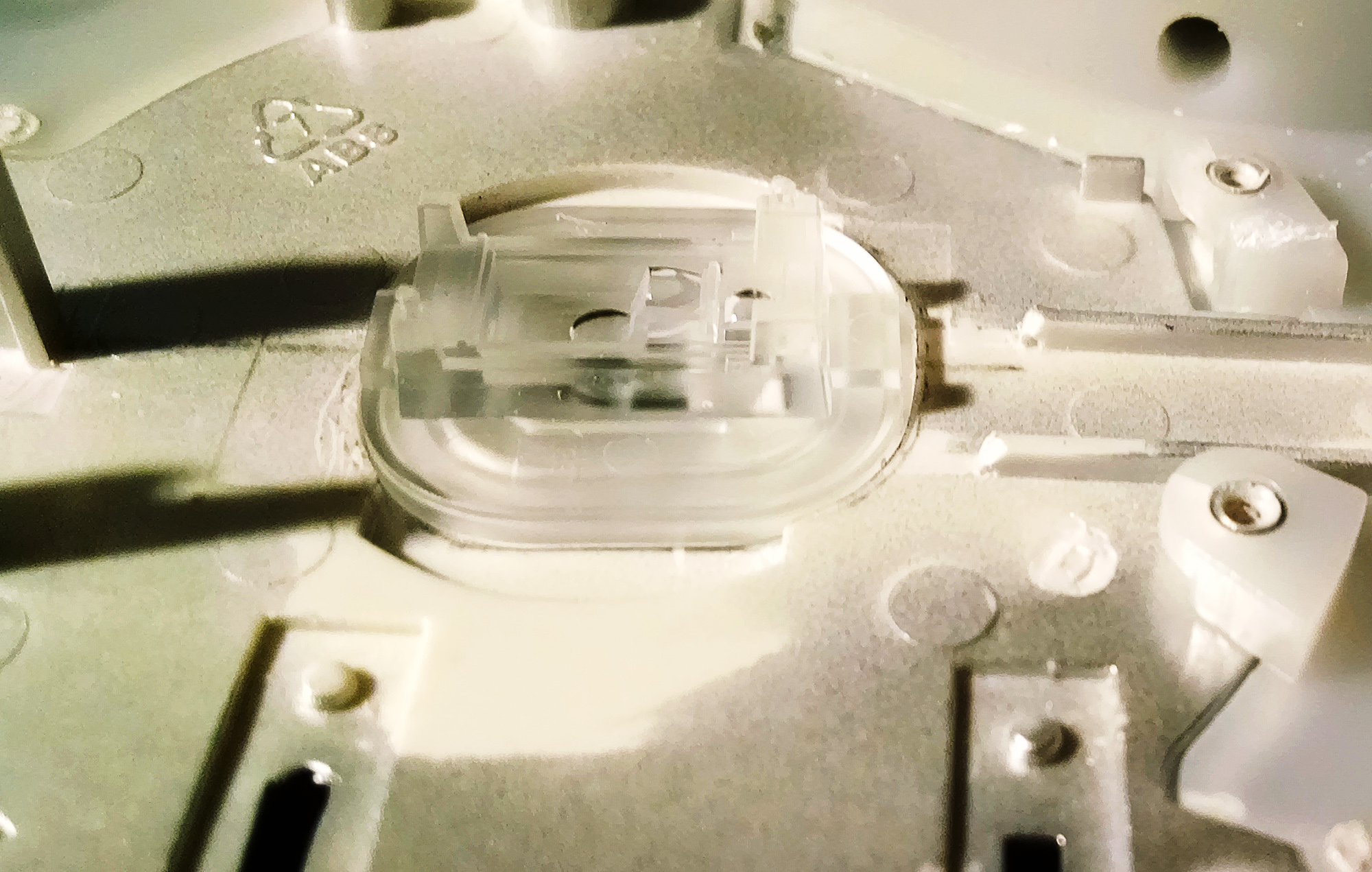
镜头配件:
 4.
4.此鼠标的底部有一个不寻常的设计。
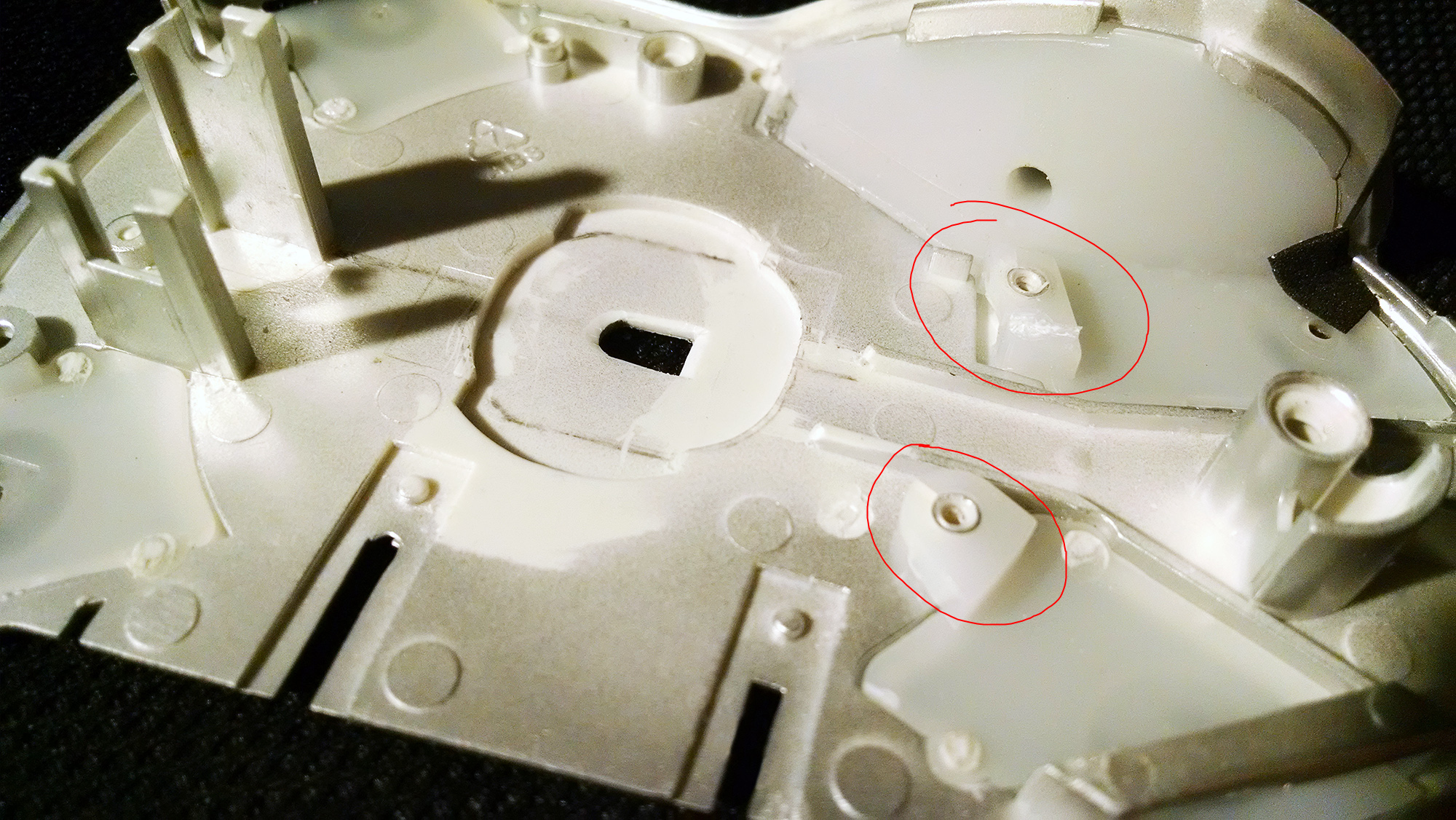
由乳白色塑料制成的侧插件安装在特殊的架子上。 这些机架位于放置WX板的位置。
如果切下这些机架,则必须以某种方式固定侧面插件,例如用热胶固定。 为了可靠性和纯粹的美观,我不喜欢此选项。
试穿WX板时,发现底部机架中的孔位于WX板的安装孔附近,并且恰好在没有轨道的区域。 因此,决定使用可用的机架,只是为了减小其高度。 为此,在WX板上制作了用于螺钉的附加孔。
结果,绵羊吃饱了,狼很安全了:)
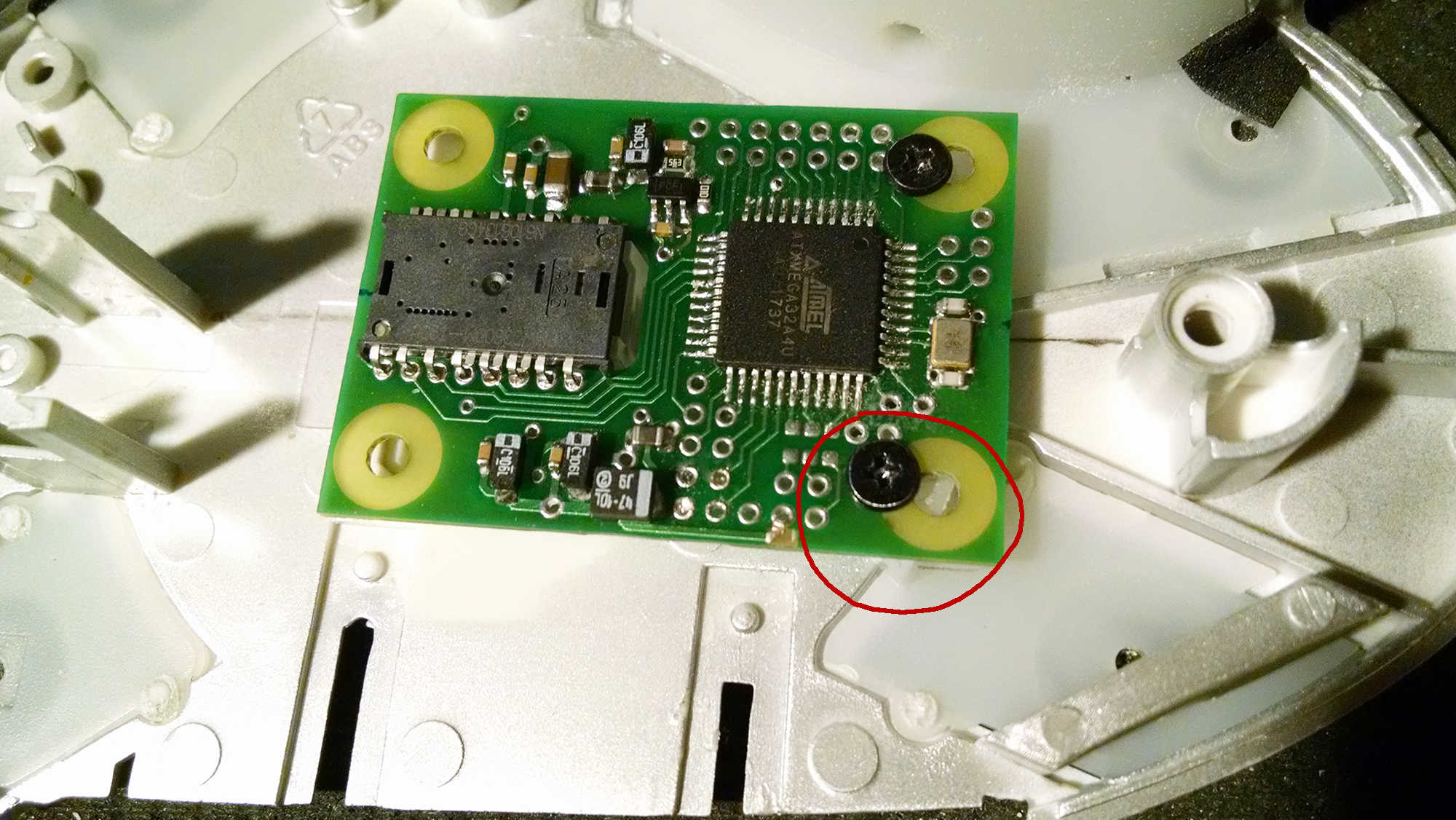
从我用硬铝制成的支架的另一侧,选择其高度,以使镜头由WX板牢固地压在底面上。

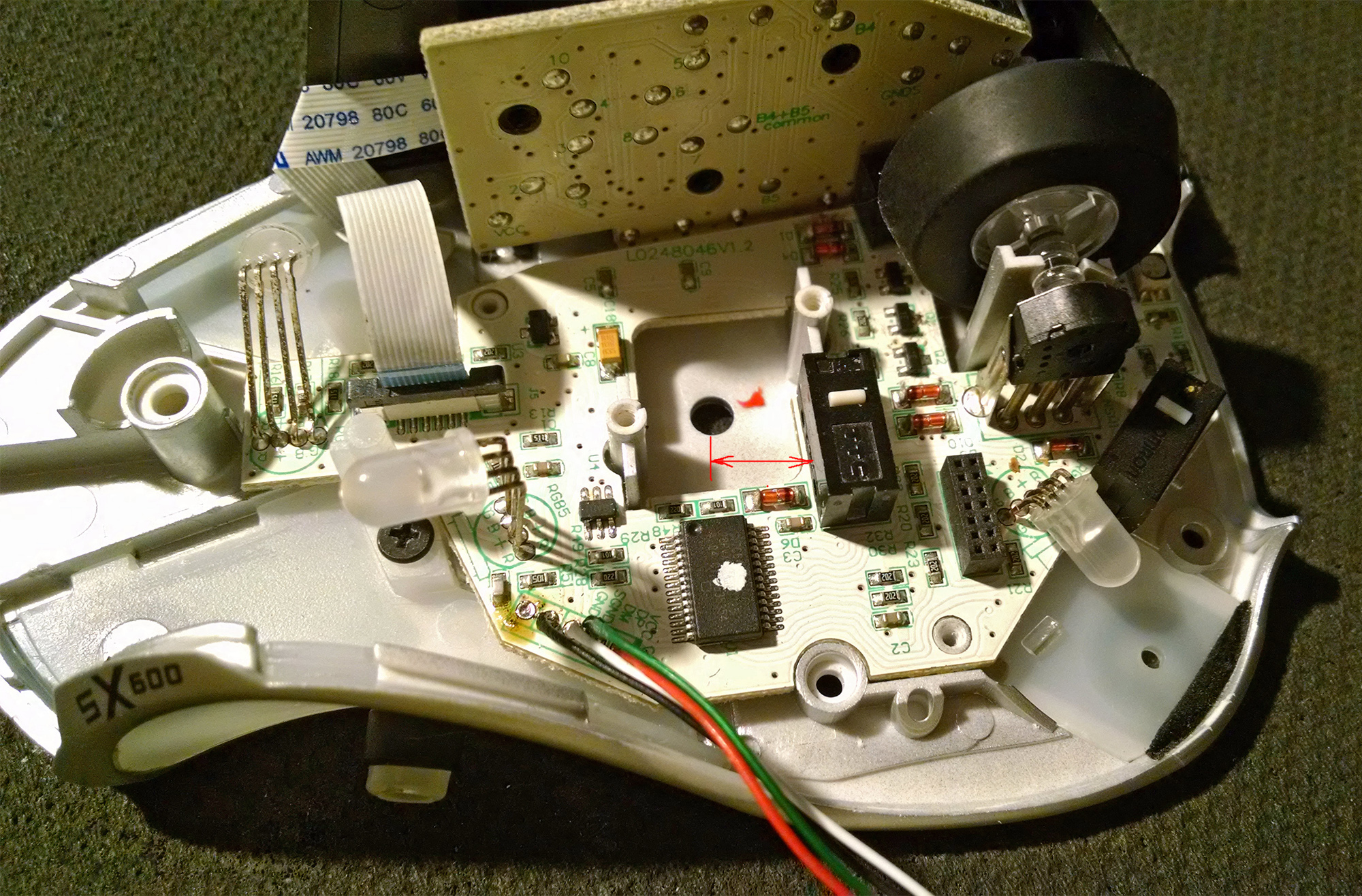
底视图

可以看出,孔的形状已更改-如传感器制造商在数据表中指示的那样进行。
5.在此阶段,使用从传感器读取的视频图像验证了镜头座的高度可确保良好的聚焦。
6.修剪了主板,以便可以容纳WX板。

可以看出,主板的装饰线落在用于附加按钮输出的孔上。
此外,还对该板进行了分析,以最大程度地利用现有轨道将按钮,编码器和背光LED连接至其上的连接器的能力。 为此,将此板上的跟踪方案“重新记录”在纸上。
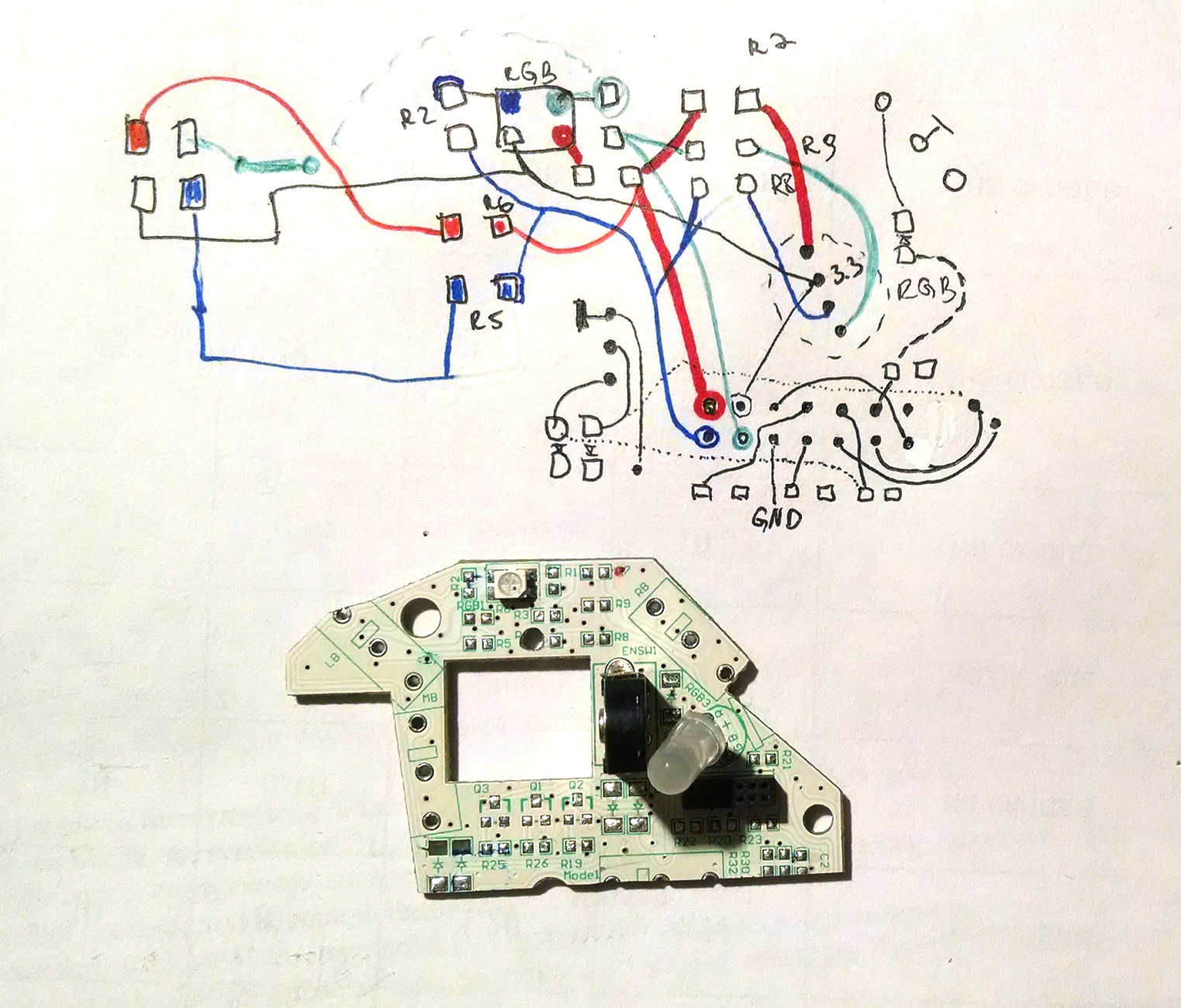
在图片中,每个RGB通道的导体均以其自己的颜色绘制。
事实证明,几乎可以使用所有现有轨道。 要添加的曲目被点缀。 幸运的是,RGB背光源已连接到连接器。
为了安装一个附加的按钮,在车轮方向上钻了3 mm的孔。
然后安装了D2FC-FK(50M)按钮(客户决定将它们替换为鼠标中的所有按钮),将RGB LED替换为相同的按钮,但引线更长,以便可以突出显示轮周围的无光泽插入物。 连接器上按钮的布局已完成。
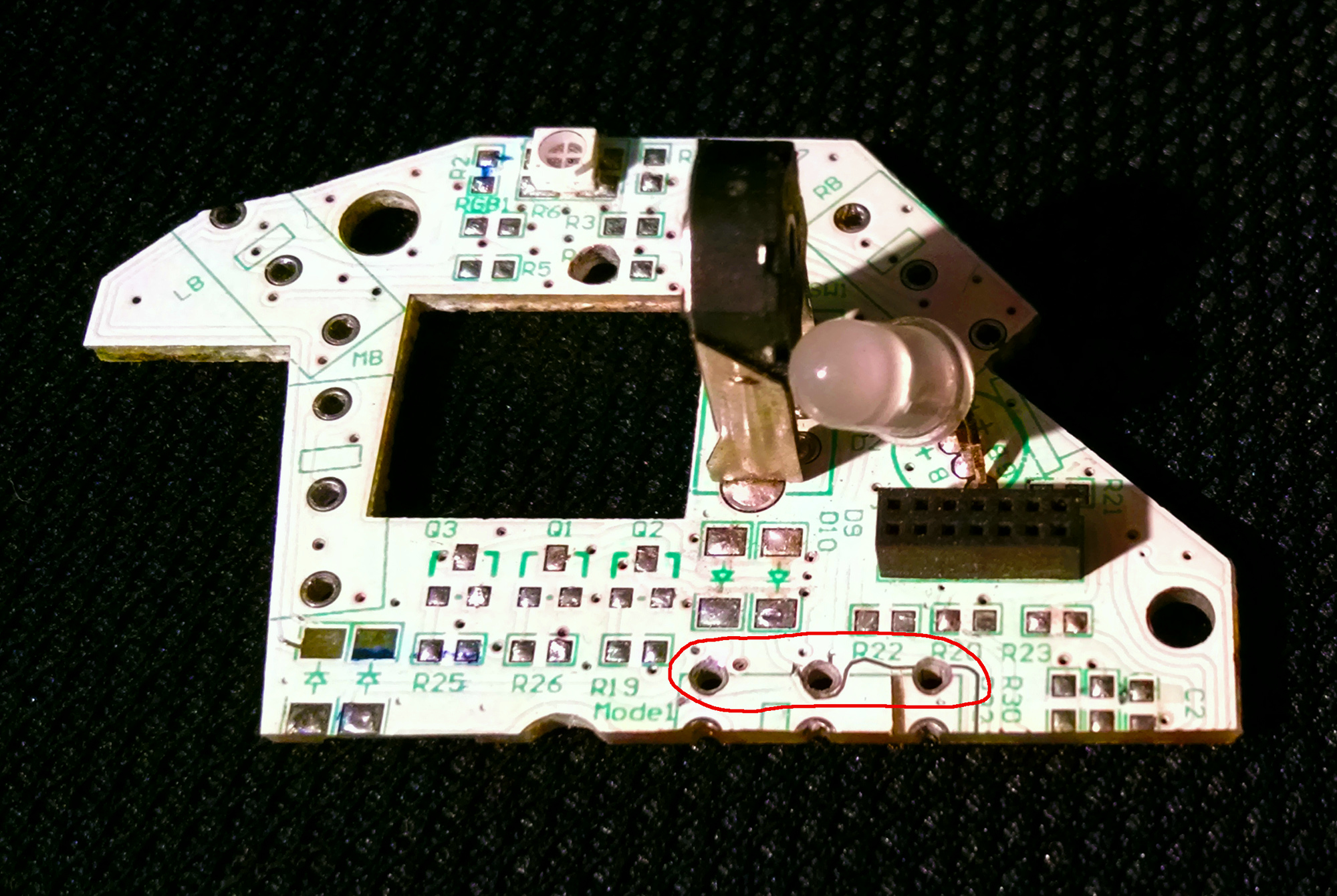
使用“总线保持器”模式时,公共触点或另一极必须在两个方向之间切换-接地和+ 3.3V。
在放置在鼠标中的微动开关中,公共触点或另一极位于按钮杆下方的边缘。 该触点在中央端子和远侧端子(从阀杆)之间切换。 在未按下状态下,磁极闭合到远处的触点,在按下状态下,磁极连接到中心端子。
大多数鼠标制造商仅使用两个输出,由于某种原因,他们更喜欢将终端连接到地面总线,而不是中央总线。 因此,要使用Buss-Keeper模式,在重做WX-Mouse时,必须更改按钮布局,以便将中心引脚焊接到地面。
幸运的是,制造商的按钮通过平均接触接地了。 这样就可以以最小的修改实现Buss-keeper模式。
还可以最大程度地利用现有轨道,而几乎不需要任何其他连接。
 7.
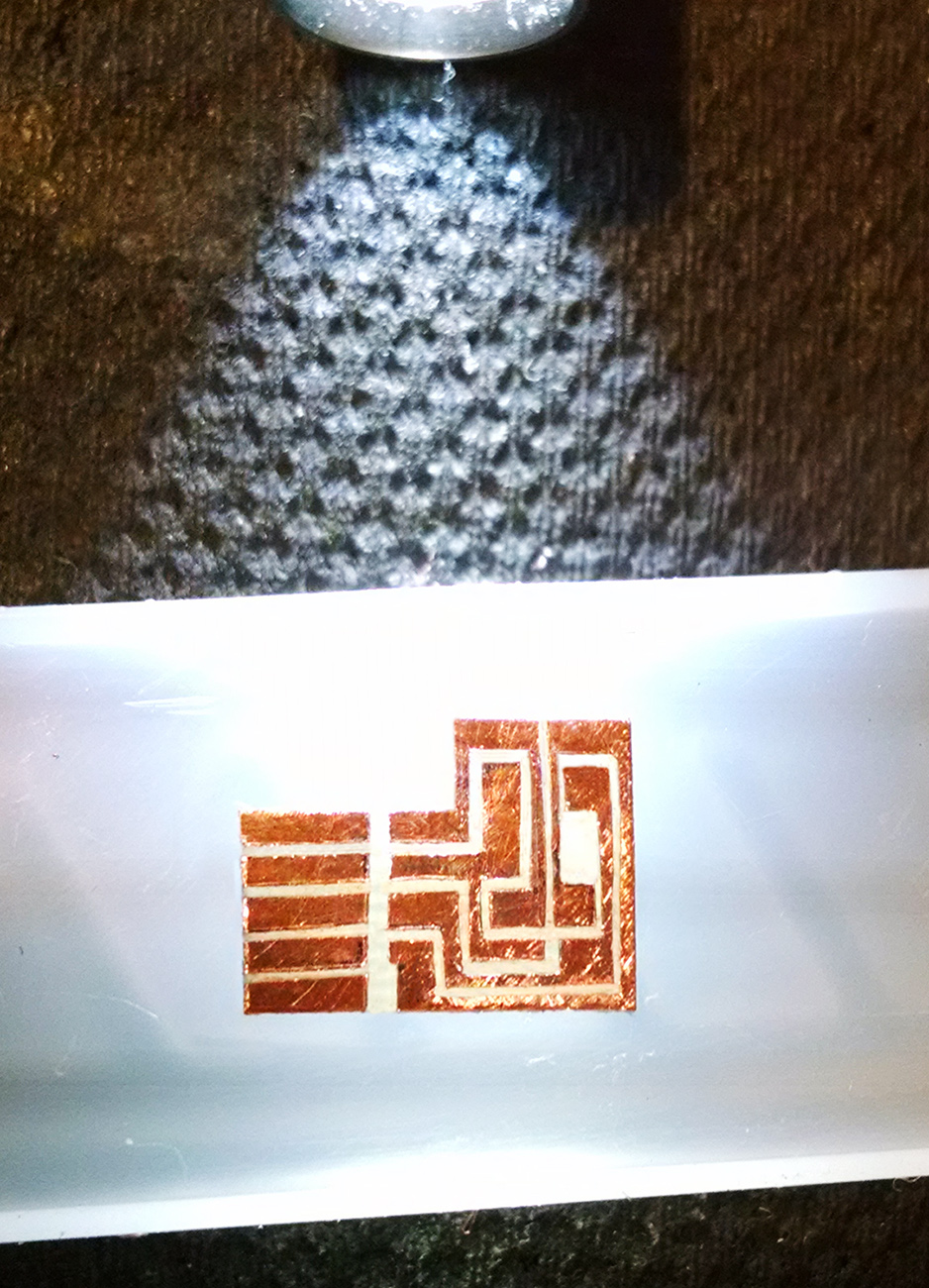
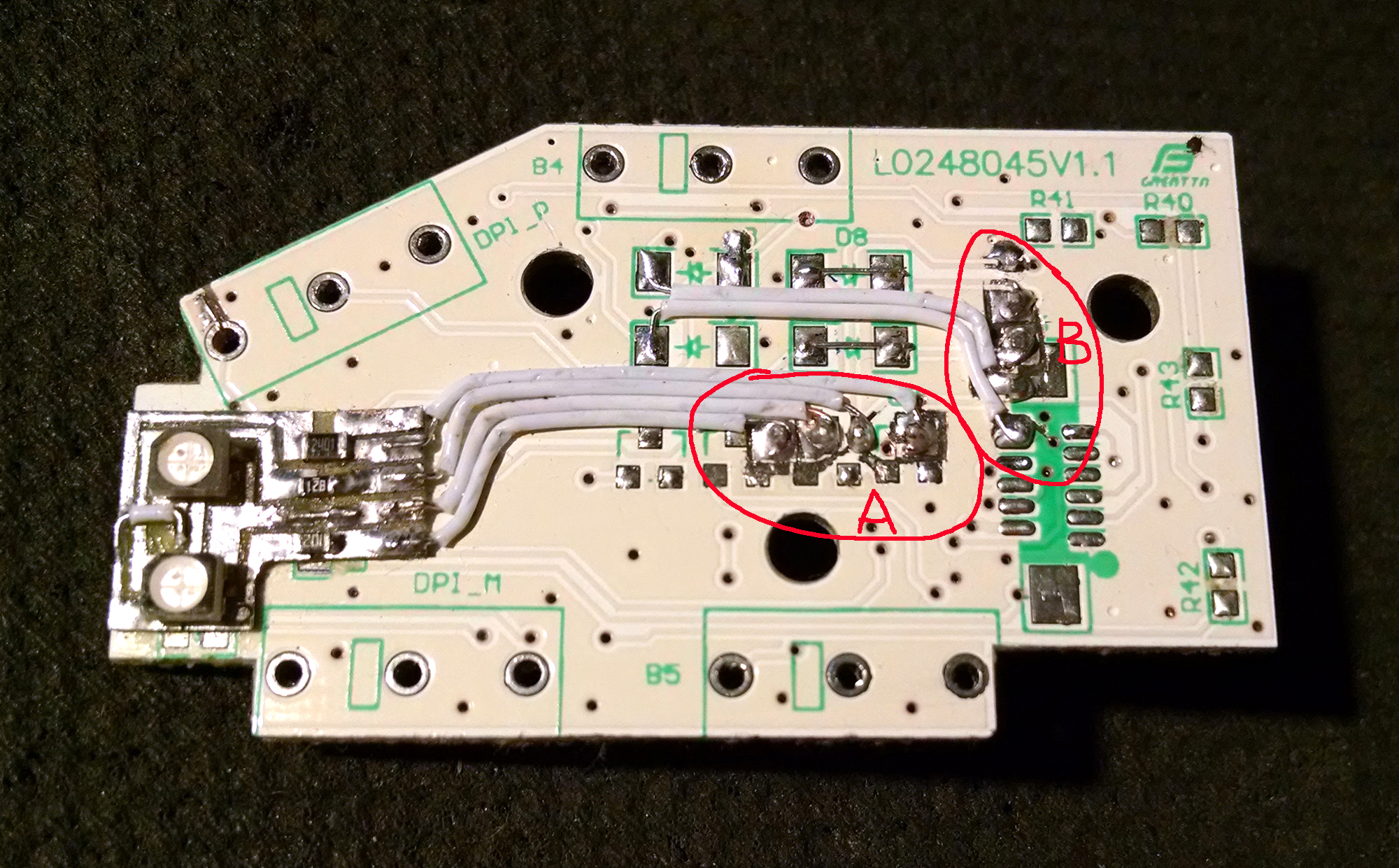
7.在侧板上,制造商未使用RGB LED,而是使用了单色LED。 因此,我不得不为两个RGB LED制作一条额外的小围巾。
围巾很原始,因此路径可以用手术刀简单地切割。 在图片中,该木板从下面照亮,因此可以清楚地看到轨道。
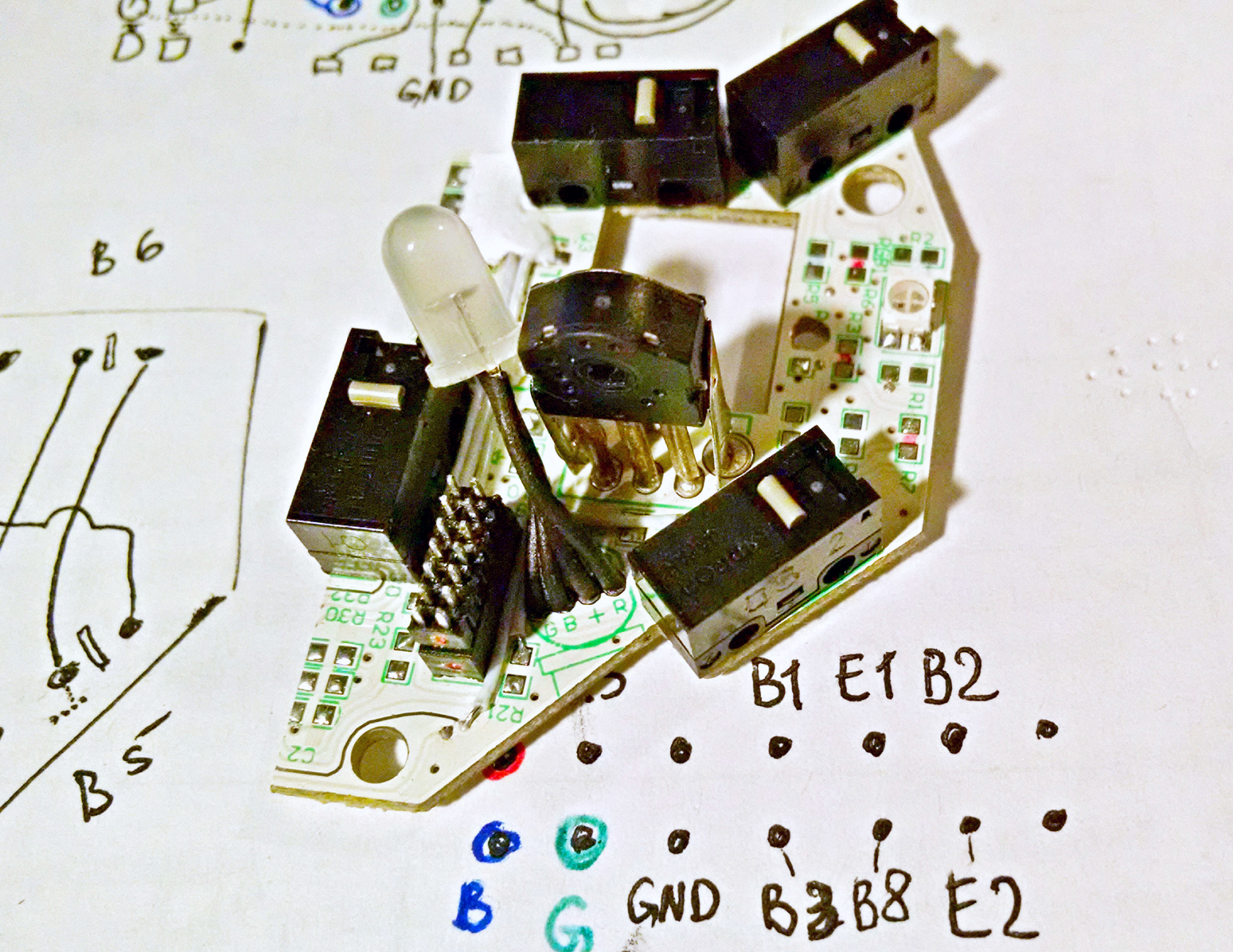
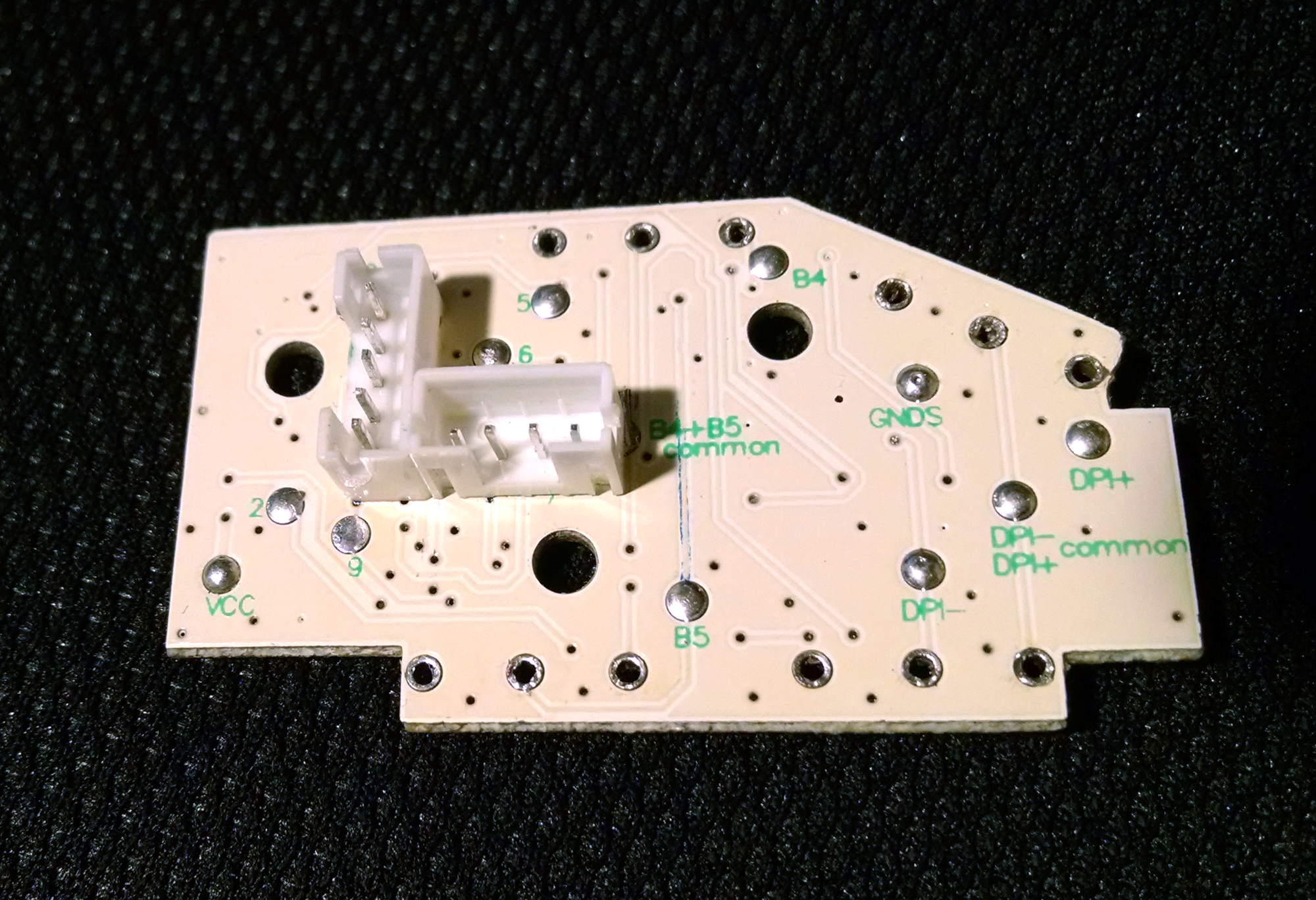
还对侧板进行了分析,以了解使用现有轨道将按钮和RGB LED连接到两个连接器的情况。
之后,将两个连接器以及一个小的RGB背光灯放在侧板上,然后进行连接。
连接器A-背光,连接器B-按钮和接地。
 8.调整
8.调整背光源,使其所有由不同LED照明的部件都具有相同的颜色。
为此,在每个RGB通道中选择电阻。
最简单的方法是对所有三个通道施加最大电平(+ 3.3V)。 在这种情况下,作为三个通道混合的结果,应该获得发光的白色,但是由于不同的颜色不一致,因此发光的颜色具有任何阴影。 之后,每个RGB通道的亮度会随着可变电阻器而变化,从而获得相同的白色。
 9.
9.对于主连接器,鉴于其密度,决定使用一条IDE ATA电缆(80芯)。

之后,所有连接器都连接到WX板上。 所有板均放置到位并通过回路连接。
 10.
10.总装完成。 在游戏中对鼠标进行了两天的测试,并将其发送给客户。


为了自行生产WX-Mouse,所有材料(图表,说明)均在会议的主题下-
激光光学传感器-W-Mouse项目 。
项目参与者进行了讨论,W-Mouse-
Waltie的作者进行了固件
升级 。
再次感谢Walkie项目的作者!