机器人越来越智能,许多型号已经能够在公共道路上独立行驶。 来自不同制造商的自动驾驶仪在识别模糊标记,偏远道路标志和交通状况方面做得非常出色。 但是自动驾驶仪仍然不能很好地解决非标准情况。
一个例子就是Uber机器人汽车系统的故障,该故障在夜间的道路上
撞倒了穿着深色衣服
的骑自行车的人 ,
该人在错误的地方过马路。 机器人的软件平台根本无法“理解”它前面的东西,因此决定继续移动。 为了解决这类问题,Luminar和沃尔沃开发了一种专用激光雷达。
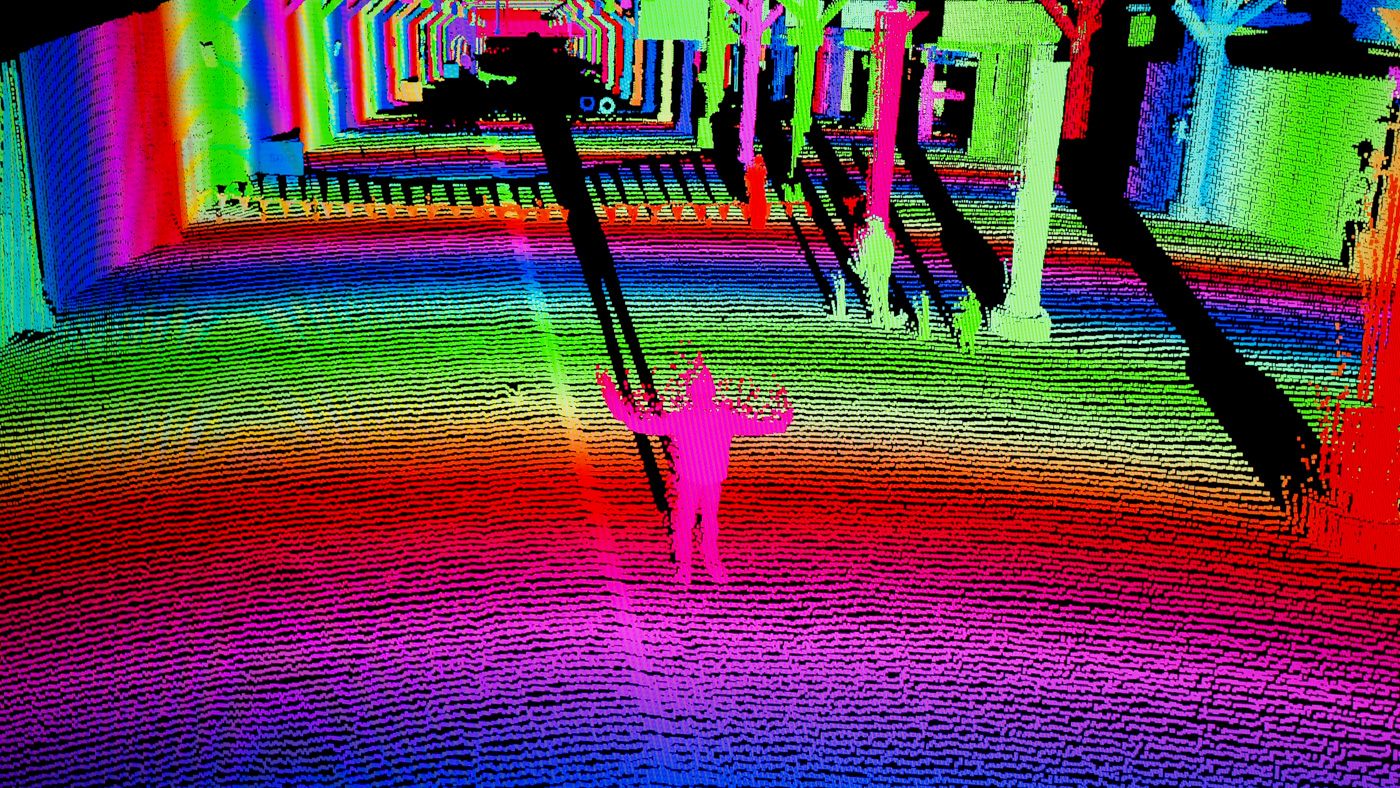
多亏了激光系统,该设备可以帮助机器人找出前方发生的事情-距离可达四分之一公里。 激光雷达可以轻松检测包括人在内的移动物体,并确定行人的活动类型。 细节识别非常大-计算机能够确定在前面移动(或站立)的人的头部,手臂和腿部的位置。
工业机器人和工程师仍试图将Robomobile称为360c,以实现高速公路上的第4级自治。 这意味着汽车可以在道路上独立执行几乎任何动作,识别外部因素并根据情况对它们做出反应。
的确,沃尔沃代表
认为 ,驾驶员仍必须将汽车驶入赛道或下车。 但是,在高速路段上什么也做不了-机器人可以自行处理一切。
沃尔沃和Luminar今年早些时候签署了一项合作协议,事实证明这是非常富有成果的。 Lumiar的高管表示,除Vovlo之外,该公司还有18个合作伙伴,其中包括丰田研究院。
汽车制造商对Lumiar激光雷达的兴趣是可以理解的-因为确定250米距离处是否存在障碍物时,汽车可以毫无问题地制动。 这足以停止一辆大型卡车。
Lumiar发言人说:“您必须能够评估物体的形状,必须在一定距离处检测物体,以便机器人有足够的时间制动。”
Luminar
通常将其解决方案放在机器的运动部件上,并且激光系统以对人类安全的频率发射激光-不可能用激光束损害视力。 该公司没有谈论多少机器人已经配备了系统,据人们判断,这个数字并不是很大。
顺便说一下,较早的时候,汽车制造商对于激光雷达应该测量什么,计算机系统应该响应什么没有一个单一的意见-也就是说,没有单一的要求标准。 现在正在形成标准,机器人移动设备的硬件平台的标准不再如此不同-不超过10%到20%。
激光雷达市场的领先公司是Velodyne,这是第一家开发此类设备的公司。 Velodyne系统位于屋顶上,它们旋转以为机器人提供圆形的“视觉”。 在大多数其他制造商中,激光雷达仪实际上是不会移动的固定装置。
一些从事机器人行业的公司正在尝试为激光雷达中使用的技术申请专利,以争取成为领导者的立足点。 不久前,Google的部门Waymo
进行了这种
尝试 。
已经提到的Velodyne与初创公司Quaneregy陷入了专利纠纷。 其他公司也从事类似的诉讼。
虽然如此,但技术正在逐步发展,并且激光雷达正变得越来越先进。 4级自动驾驶汽车很可能就在拐角处,经过5-7年后,他们将在公路上骑行,而不是为了测试,而是运送乘客。