“休斯顿,我们有问题。”我脑海里传出疲倦的声音,试图在晚上通过InvenSense数据表IMU MPU-9250。 当所有单词都可以单独理解时,但它们的关系却被混淆为不可能。 所有这些都是从LSB参数开始的,我只隐约记得在翻译中它是最低有效位。 然后是“决议”,“敏感度”,甚至我进一步意识到所得到的文字已经可以被命名为“傻瓜数据表”。
关于惯性模块的主要模块。
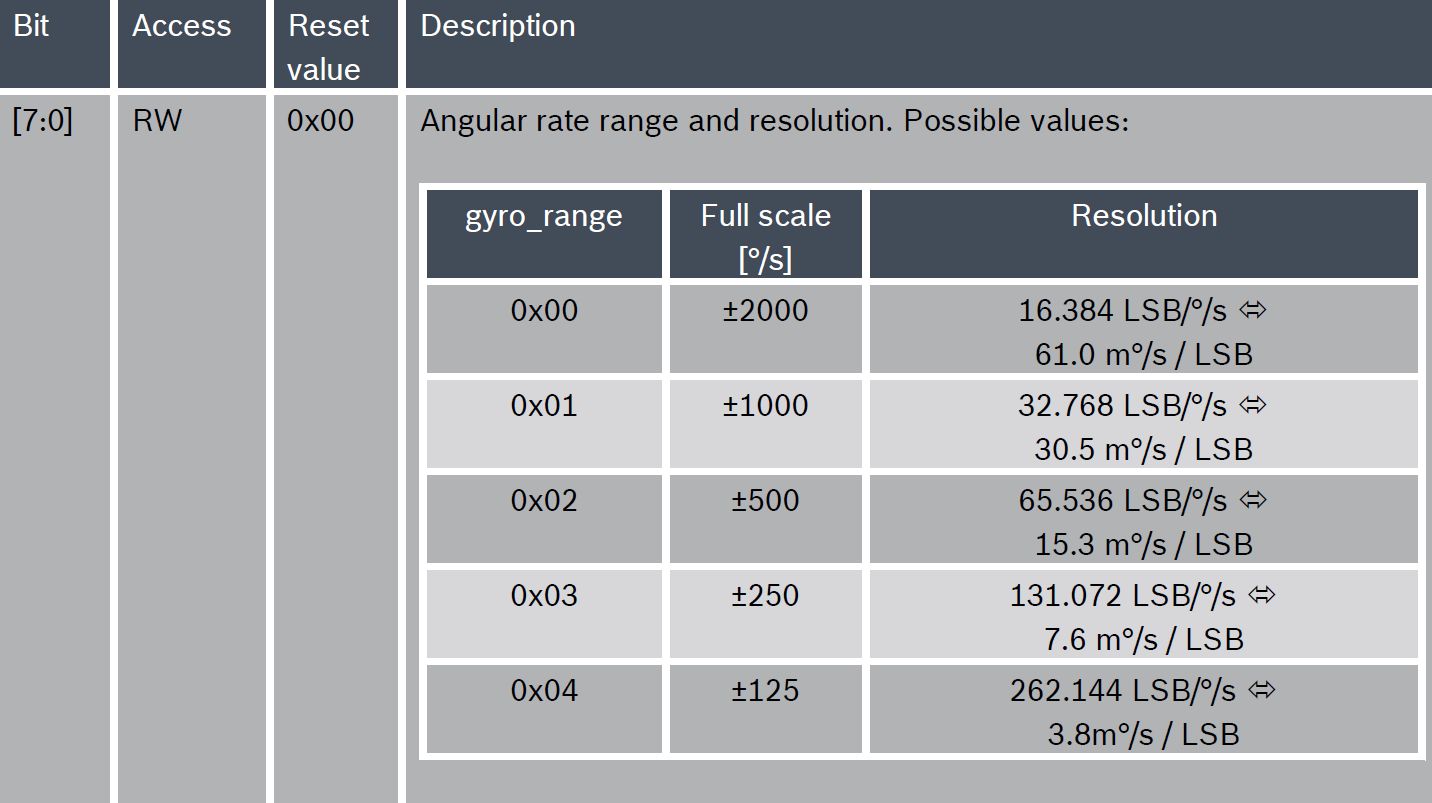
MEMS陀螺仪
MPU-9250由三个独立的单轴振动角速度传感器(MEMS陀螺仪)组成,它们响应围绕X轴,Y轴和Z轴的旋转。 两个悬挂的质量沿相反的轴振动。 随着角速度的到来,科里奥利效应导致振动方向发生变化(
vecFK=−2m[ vec omega times vecvr] 它由电容传感器固定。 测得的差分电容分量与运动角度成正比[电子时间]。 得到的信号被放大,解调和滤波,产生与旋转角速度成比例的电压。 该信号使用板载16位ADC进行数字化。 采样率可以通过编程方式从每秒3.9到8000个样本(每秒的样本数,SPS)变化,并且用户定义的低通滤波器(LPF)提供了广泛的可能截止频率。 特别是需要低通滤波器,以消除电动机的振动(通常在20-25 Hz以上)。
三轴MEMS加速度计
对每个轴使用单独的测试质量,当沿该轴发生加速度时会移动(由电容传感器固定)。 MPU-9250体系结构减少了温度漂移和电气参数变化的风险。 当设备位于平面上时,它将沿X和Y轴测量0g,沿Z轴测量+ 1g。
比例因子 (比例因子-输出信号的变化与输出的测量信号的变化之比)在出厂时已校准,并且与电源电压无关。 每个传感器都配备一个单独的sigma-delta ADC(由调制器和数字低通滤波器组成,更多关于[Easyelectronics]中的设备),其数字输出具有可调的测量范围。
而关于三轴MEMS磁力计
基于高精度霍尔效应技术。 它包括确定沿轴的地球磁场强度的磁传感器,控制电路,信号放大电路和用于处理来自每个传感器的信号的计算电路。 每个ADC的分辨率为16位,测量范围为
\下午4800\亩 。 要测量弱磁场,可以使用微特斯利SI系统(μT)或高斯(G,GHS系统)中的单位:
1G.=100\亩 ,[Radio Pilot])。
那么什么是LSB以及如何计算呢? 生产指导书
假设我们的加速度计现在在测量范围内运行
FS= pm2克 ,即所有可能值
2 cdotFS=4克 。 相应的电压值由一个16位ADC数字化,该ADC可以尽可能地划分整个间隔
216=65536 步骤。 可以检测到的最小增量仅一步
LSB=2 cdotFS/65536 。 在这里,我们必须记住,该帐户是从头开始的,因此实际上最大测量值将是
2 cdotFStrue=(216−1)∗LSB=65535∗LSB=2 cdotFS−LSB 。 也就是说,ADC或DAC数字字中的位数越多,差异就越小。 在这种情况下,将传感器在特定范围内的
灵敏度(有时称为比例因子,灵敏度比例因子)确定为电输出信号与机械冲击之比。 传统上表示信号频率为100 Hz和温度
T=+25 circC. 对于MPU-9250,灵敏度为
216/(2 cdotFS) 每克或
circ/s (
LSB/克 ,
LSB/( circ/s) ),对于博世Sensortec的另一个IMU BMI088,陀螺仪灵敏度的计算方法也与此相同,对于加速度计则使用
(216−24)/(2 cdotFS) 每克的步骤

我们从陀螺仪的规格中抽出了FS变体,为了避免两次起伏,加速度计也从规范中退出。

我还从BMI088的文档中获取了加速度计的FS(请参见下文)。
| 陀螺仪,16位 (2N=65535) | 加速度计,16位 (2N=65535) |
|---|
| 范围(FS) circ/s (dps) | LSB, circ/s (dps) | 范围(FS),g | LSB毫克 |
| \下午125 (FS = 250) | 0.004 | \下午2 (FS = 4) | 0.06 |
| \下午250 (FS = 500) | 0.008 | \下午3 (FS = 6) | 0.09 |
| \下午500 (FS = 1000) | 0.0015 | \下午4 (FS = 8) | 0.12 |
| \下午1000 (FS = 2000) | 0,03 | \下午6 (FS = 12) | 0.18 |
| \下午2000 (FS = 4000) | 0.06 | \下午8 (FS = 16) | 0.24 |
| | \下午12 (FS = 24) | 0.37 |
| | \下午16 (FS = 32) | 0.48 |
| | \下午24 (FS = 48) | 0.73 |
一切似乎都准备就绪,您可以继续前进。 在某些情况下(例如,下面是BMI088文档的剪辑),将分别指示诸如分辨率之类的参数。
实际上,似乎应该是LSB。 但是,为什么我们看到一个值而不是绑定到特定范围的几个值呢? 我不得不扩大寻找答案的研究资料来源。

什么是分辨率?
当试图在价格和性能之间取得平衡时,传感器可靠看到的最小值非常重要。 这不是准确性-高分辨率传感器可能不是特别准确,就像某些区域中的低分辨率传感器可能具有足够的准确性一样。 不幸的是,如果我们可以使用ADC的所有16位,则LSB仅定义理论上的最小可区分值。 这是数字世界中的解决方案。 以模拟方式,某些步骤将产生噪声,并且有效位的数量将减少。
噪声的特征是什么?噪声来自何处?
噪声源通常可以分为将运动转换为电压信号的电路电子噪声(约翰逊热噪声,散粒噪声,粉红色1 / f闪烁噪声等)和机械噪声(由于存在小运动部件而产生布朗噪声)。来自传感器本身。 后者的特性将取决于系统机械部分的谐振频率
f0 (传感器的固有振荡频率
omega0=2 pi/f0 )
整个频谱范围内的RMS噪声-总RMS(均方根)噪声
噪声水平可以通过几种方式确定。 您可以在时域或频域中考虑它们(在傅立叶变换之后)。 在第一种情况下,残留噪声被视为来自固定传感器的信号的均方根值(实际上,这是在
\上线x=0 )在一定时期内:
xRMS= sigmaX= sqrt sumni=1(xi− overlinex)2 overn−1
小于宽带噪声水平的加速度或角旋转速度将无法区分-这是实际分辨率。 交流电压或电流的均方根值(通常称为有功或有效)等于恒定信号的值,该信号的作用将在该时间段内在有功(电阻)负载中执行相同的工作。 这种方法在评估以白噪声为主的宽带噪声时最有效。
对于白噪声,振幅(瞬时峰值)与均方根之比(概率为99.9%)为
NPP/NRMS=6.6 该比率称为交叉因数(波峰因数,交叉比率)。 您可以选择95.5%的概率-交叉因子为4。

实际上,噪声信号的表现并不那么好,并且会产生峰值,使交叉因子增加多达10倍。 在某些规格中,您可以找到值
NPP 或乘数本身。
在0.1–10 Hz的窄低频频带中,闪烁噪声“ 1 / f”起主要作用,该噪声使用峰峰值噪声信号幅度进行估算。
光谱密度
有时,信号在频域中更方便考虑,在频域中,对信号的描述称为
频谱 (幅度和相位对频率的依赖性)。 规范中噪声的可能特征之一称为
噪声功率谱密度(PSD),噪声谱密度,噪声功率密度或简称
为 。 描述噪声功率在频率范围内的分布。 无论通过电流或电压表示电信号如何,都可以将负载上消耗的瞬时功率归一化(R = 1 Ohm)并表示为
p(t)= nu2(t)/R=i2(t)R=x2(t) 一段时间内信号消耗的平均功率
(−T/2,T/2),PTx= frac1T intT/2−T/2x2(t)\,dt
功率是能量输入的速率。 确定的和非周期性的信号是通过能量确定的。 周期和随机信号以功率表示,因为它们不受时间限制,因此不受能量限制,并且在任何给定时间,它们的平均功率都不为零
Px= limT to infty frac1T intT/2−T/2x2(t)\,dt。
您可能还记得[Sklyar],它是通过无限数量的谐波和频率增加的组合来表示任意周期信号:
x( lambda)= fraca02+ sum inftyn=1(an cosn lambda+bn sinn lambda),
在以指数形式表示余弦和正弦之后
cos lambda= fracei lambda+e−i lambda2, sin lambda= fracei lambda−e−i lambda2i
和替换
lambda= omegat=2 pif0t= frac2 pitT0 可以写成
x(t)= fraca02+ frac12 sum inftyn=1[(an−ibn)ein omegat+(an+ibn)e−in omegat]= sum inftyn=− inftycnein omegat,
的傅里叶级数的复数系数(频谱分量)在哪里
x(t) ,
$$ display $$ \ begin {equation} c_n = \ frac {1} {T_0} \ int ^ {T_0 / 2} _ {-T_0 / 2} x(t)e ^ {-in \ omega t},dt = \开始{cases} \ frac {1} {2}(a_n-ib_n),&n> 0 \\ \ frac {a_0} {2},&n = 0 \\ \ frac {1} {2}( a_n + ib_n),&n <0 \结束{cases} \结束{equation} $$显示$$
在一般情况下,这些系数可表示为:
cn=|cn|ei thetan,
|cn|= frac12 sqrta2n+b2n, thetan= arctan\左( fracbnan\右),b0=0,c0= fraca02。
幅度和相位频谱称为依赖图。
|cn| 和
thetan 从频率。 功率谱密度
PSD(f) 周期性信号
x(t) 给出信号功率在频率范围内的分布:
PSD(f)= sum inftyn=− infty|cn|2 delta(f−nf0)
并具有尺寸
[W/Hz]=[x2/Hz] 实际信号的平均归一化功率为
Px= int infty− inftyPSD(f),df
非周期性随机信号(特别是噪声)在限制意义上可以描述为周期性的。 如果
T0 趋于无穷大,脉冲序列变成独立的脉冲
x(t) ,频谱线数趋于无穷大,频谱图变成平滑的频谱
X(f) 对于这种极限情况,我们可以确定一对积分傅立叶变换
X(f)= int infty− inftyx(t)e−i2 pift,dt
和
x(t)= int infty− inftyX(f)ei2 pift,df,
在哪里
X(f) -傅立叶图像。
通过限制确定随机信号的功率谱密度
PSD(f)= limT\到 infty frac1T|XT(f)|2
并描述了频率范围内信号功率的分布。
由于我们假设静止状态下传感器白噪声的平均值为零(
overlinex= overlinex2=0 ),则均方根值的平方等于方差,并表示归一化负载中的总功率:
Noise2RMS= sigma2x=Px= int infty0PSD(f),df= int带宽0PSD(f),df=PSD(带宽−0)
噪声均方根= sqrt噪声密度\乘以带宽
我们看一下规格-实际上,它的平方根以及相应的尺寸以光谱密度的名称表示
[ circ/s/ sqrtHz] 或
[ mug/ sqrtHz] 即,没有表示读取噪声的频带(带宽)的RMS噪声的值是没有意义的。
有关带宽选择的更多信息
在MEMS传感器的输出端,我们得到不同频率的信号。 假定我们对预先测量的过程有一定的了解。 例如,当确定无人机的加速度矢量时,噪声就是设备的振动。 您可以使用低通滤波器将它们从有用信号中分离出来,该滤波器会切断高于指定频率的所有频率(例如200 Hz)。 MPU-9250可以使用魔术名称
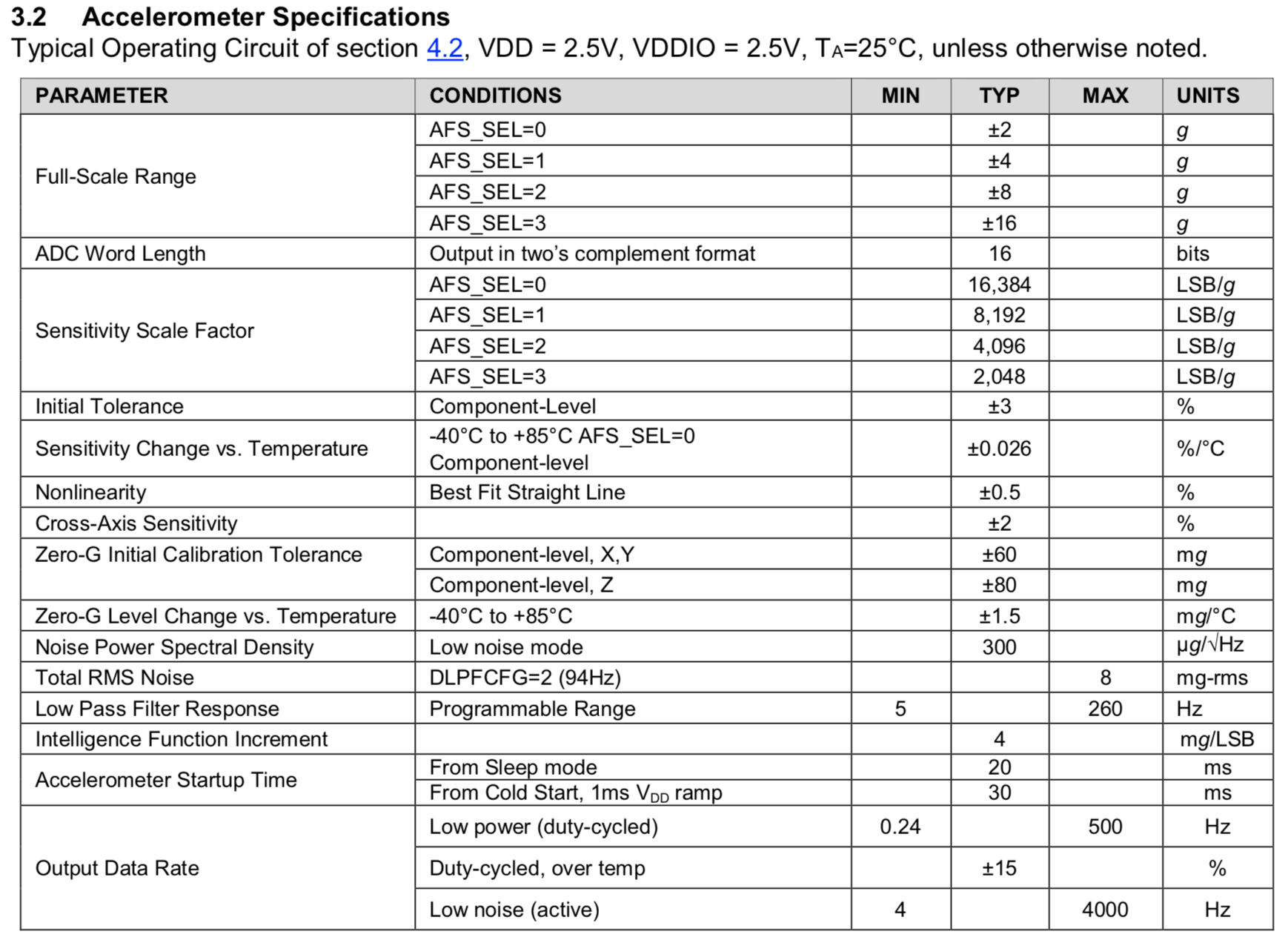
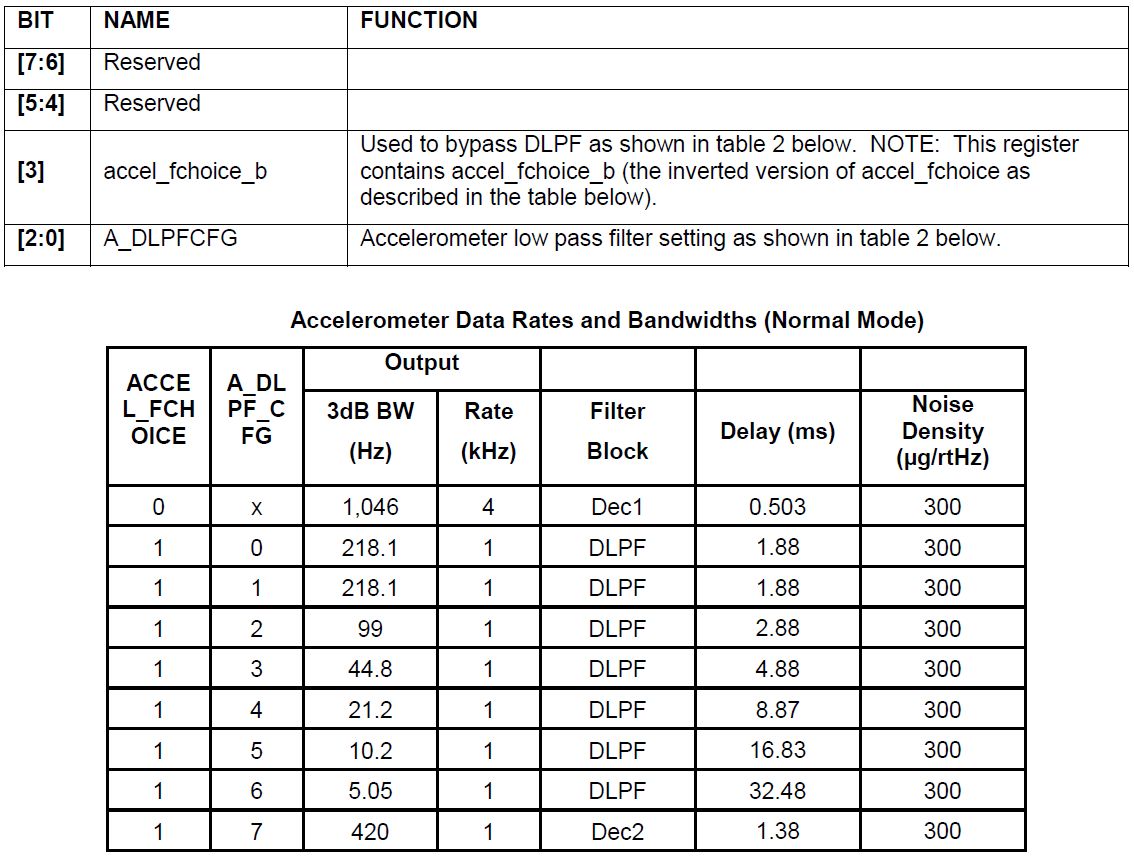
DLPFCFG的参数来调整低通滤波器的截止频率。 它代表数字低通滤波器配置。 此外,在本规范中,到处都出现了同样神秘的类型(DLPFCFG = 2,92Hz),但是为了解码,我不得不进入另一个文档“ Register Map and Descriptions”。 它显示了应在其中写入寄存器的哪几组位以实现所需的效果:
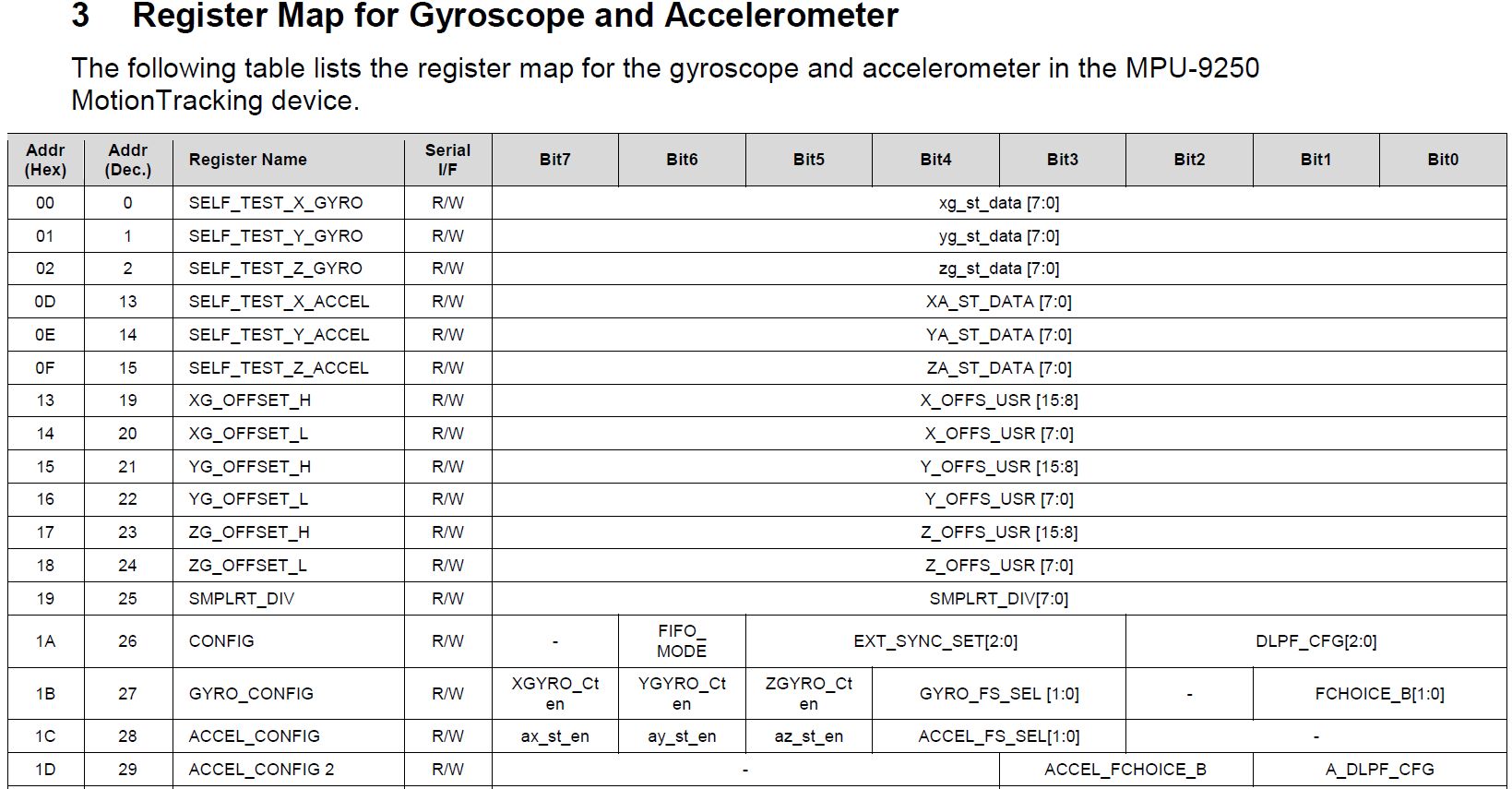
省略配置的技术细节,可以说以下。 在此传感器中,不仅可以对加速度计,陀螺仪的读数,而且可以对温度传感器的读数进行可自定义的过滤。 每种模式共有7到10种模式,其特征在于带宽(单位:Hz),延迟(单位:ms),采样频率(Fs)(单位:kHz)。

中的“噪声密度”列
mug/rtHz= mug/ sqrtHz ,在“带宽”列中添加了值“ 3dB”。
这并不容易,所以让我们直接浏览一下清单。
古罗马的遗产
采样率+抽取 Delta\西格玛 ADC =数字输出数据速率(ODR)有了采样频率(它是采样频率),一切都很清楚-这是ADC在采样期间每秒获取的时间连续信号的点数。 以赫兹为单位。
Fs= frac1 deltt
为了获得接近信号峰值幅度的值,重要的一点是,采样频率至少应为有用信号频率的10倍。 MPU-9250提供三个选项:Fs = 32kHz,8kHz,1kHz。
但这绝对不意味着加速度计或陀螺仪的输出信号会出现相同的周期。
如果您使用相同的无人机,那么一切都在努力减少能耗,提高计算速度并降低输出数据的噪声。 您可以通过允许内部算法在一段时间内集成输入信息来减少更新输出数据的频率。 RMS值将减小,但带宽也将变窄(传感器只能检测那些频率小于数据更新速率的50%的进程)。
最好立即回忆起
Kotelnikov定理 。 她承诺,在对模拟信号进行采样时,如果有用信号的频率不超过采样频率的一半(也称为
奈奎斯特频率 ),则可以避免信息丢失(即,恢复信号不失真)。 实际上,在大多数情况下,经典的抗混叠滤波器(一种将输出信号中的次级频率分量的贡献降低到可以忽略的水平的低通滤波器-GOST R 8.714-2010)要求至少相差2.5倍[西门子]。
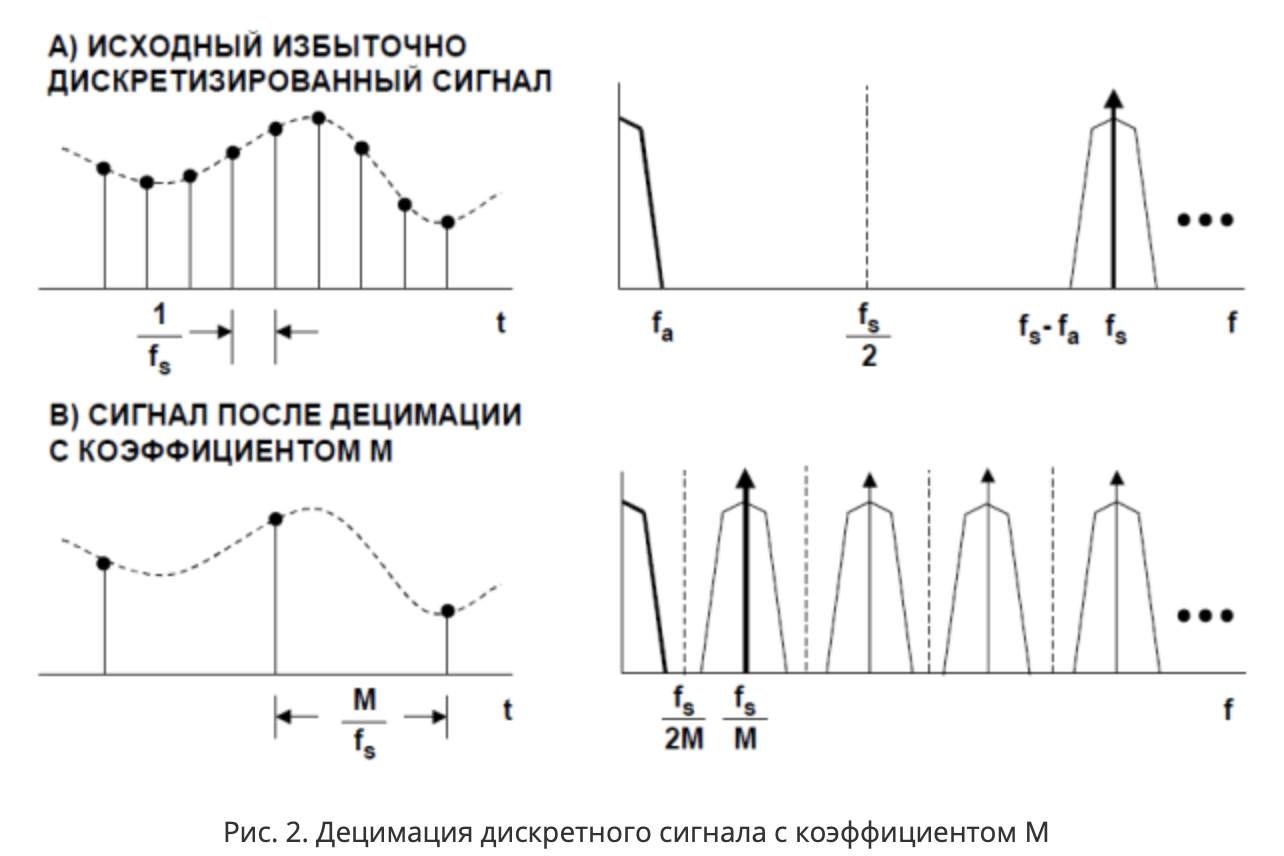
对于Fs = 32kHz,奈奎斯特频率为16kHz。 同时,有用的信号不可能超过fa = 20Hz频带(很少能每秒超过20次改变运动方向)。 总的来说,采样频率明显高于存储fa频带中包含的信息所需的频率(40Hz,高400倍),也就是说,有用信号被过采样。 频率fa和fs-fa之间的频带不包含任何有用的信息。 您可以通过稀疏样本序列(样本)来降低采样率(在该图中使用系数M [7]完成)。 此过程称为
抽取 。
根据MPU-9250的规范,加速度计配备了一个
sigma-delta ADC 。 基于它的方案消耗的功率最小。 应该注意的是,这些转换器的带宽非常窄,不会超过声音范围[Easyelectronics],但是对于标准的直升机而言,则不需要更多带宽。 它们由两个块组成:
Sigma Delta -调制器和数字抽取低通滤波器。
为什么将低通滤波器和抽取结合起来?
维基摘录:
如果原始信号不包含高于抽取信号的奈奎斯特频率的频率,则接收(抽取)信号的频谱形状与原始信号频谱的低频部分一致。 与新采样序列相对应的采样速率比原始信号的采样频率低N倍。
如果原始信号包含的频率高于抽取信号的奈奎斯特频率,则抽取将导致混叠(频谱叠加)。
因此,为了保持频谱,在抽取之前,有必要从原始信号中去除高于抽取信号的奈奎斯特频率的频率。 MPU-9250规范并未包含有关DLPF特性的大量信息,但可以发现发烧友的研究[9]。
带宽,它是频率响应(frequency response)
传感器检测到运动并提供有效输出信号的频率范围。 在某些规格中,给出了传感器的频率响应-加速度计的电输出对具有固定振幅但频率不同的外部机械应力的依赖性。 在带宽内,频率响应的不均匀性不会超过给定值。 在使用数字低通滤波器的情况下,带宽的选择仅允许您更改截止频率,从而不可避免地影响传感器对空间位置变化的响应速度。 截止频率必须小于数字输出数据速率(ODR)的一半,也称为奈奎斯特频率。
对于MPU-9250加速度计,确定带宽边界,以便在该范围内,信号的频谱密度与峰值(在0 Hz频率下)的差异不超过-3 dB。 该水平大约对应于频谱密度下降一半(或峰值频谱幅度的70.7%)。 让我提醒您,对于与场强平方成正比的能量(功率,能量,能量密度),以分贝表示,
DP=10 lgP2 overP1
。
底线:通过低通滤波器的信号噪声较小,分辨率较高,但带宽较小。
因此,在规范中指定分辨率而不参考带宽是没有意义的。返回解析
在MPU-9250的规格中,基本上没有有关分辨率的信息,对于BMI088,其名称为“分辨率”,数字分辨率(LSB)和灵敏度表示为“:
每个带宽的分辨率可以通过峰值噪声来估计。
Noisepk−pk=总噪声RMS\乘以CrestFactor=总噪声RMS\乘以4 输出端的噪声的均方根值与规范中指定的频谱密度(或更确切地说,其根部)和等效噪声带宽(等效噪声带宽,ENBW)相关,等效系统的通带具有矩形频率响应,并且零频率处的值与原始系统相同以及暴露于白噪声系统输入时的输出色散):
NRMS=PSD\时间 sqrtENBW
噪声带宽通过对应于低通滤波器阶数的系数与3dB频带相连:
ENBW=1.57 cdotf3dB textrm对于一阶
ENBW=1.11 cdotf3dB textrm对于第二阶
ENBW=1.05 cdotf3dB textrm对于三阶
ENBW=1.025 cdotf3dB textrm对于四阶
根据[MPU9250_DLPF]中的研究判断,我们的选择是1.57。 所获得的均方根值考虑了白噪声的影响(那里没有量化噪声或机械噪声)。 例如,对于加速度计,
BW=99Hz,PSD=300\μg/ sqrtHz 原来
NRMS=4mg 。 在这种情况下,规范包含了总均方根噪声
总RMS噪声=8mg 差异很大。 不幸的是,它仅在一个频段上显示,而对于BMI088加速度计,在规范中仅显示PSD。 因此,我们将使用原样。 考虑交叉因素4。现在最有趣。 态度
FS/Noisepk−pk 将在此测量范围内给出有效位的近似顺序,该顺序明显小于ADC的16位分辨率。
| MPU-9250 | BMI088 |
|---|
| 陀螺仪 |
|---|
| smallN总计RMS=0.1 circ/s(带宽=92Hz) | \小NRMS=0.1 circ/s(带宽=47Hz) |
|---|
| \小型PSD=0.01 circ/s/ sqrtHz | \小型PSD=0.014 circ/s/ sqrtHz |
|---|
| \小带宽,Hz | \小NRMS, circ/s−rms | \小NPP, circ/s | \小带宽,Hz | \小NRMS, circ/s | \小NPP, circ/s |
| | | 523 | 0.41 | 1.6 |
| 250 | 0.2 | 0.8 | 230 | 0.27 | 1.1 |
| 184 | 0.17 | 0.69 | 116 | 0.19 | 0.76 |
| 92 | 0.12 | 0.49 | 64 | 0.14 | 0.57 |
| 41 | 0.08 | 0.32 | 47 | 0.12 | 0.49 |
| 20 | 0.06 | 0.23 | 32 | 0.1 | 0.4 |
| 10 | 0.04 | 0.16 | 23 | 0.09 | 0.34 |
| 5 | 0.03 | 0.11 | 12 | 0.06 | 0.25 |
| 加速度计 |
|---|
| \小N总计RMS=8mg textrm(带宽=99Hz) | \小型PSDXY=160\μg/ sqrtHz |
|---|
| \小型PSD=300\μg/ sqrtHz textrm(陀螺仪关闭) | \小型PSDZ=190\μg/ sqrtHz(gFS3g, textrm普通模式) |
|---|
| \小带宽,Hz | \小NRMS,mg | \小NPP,mg | \小带宽,Hz | \小NRMSXY,mg | \小NPPXY,mg |
| 218.1 | 5.6 | 22 | 280 | 3.4 | 14 |
| 99 | 3.8 | 15 | 145 | 2.4 | 10 |
| 44.8 | 2.5 | 10 | 80 | 1.8 | 7 |
| 21.2 | 1.7 | 7 | 40 | 1.3 | 5 |
| 10.2 | 1.2 | 4.9 | 20 | 0.9 | 4 |
| 5.05 | 0.9 | 3.4 | 10 | 0.6 | 2.6 |
| 420 | 7.8 | 31 | 5 | 0.5 | 1.8 |
| 1046 | 12.3 | 49 | | | |
延迟(毫秒),或延迟来自何处
由于需要将变量存储在内部缓冲区中,以便以不同的频率将信号除以滤波器
合计 滤波器的截止频率越低,信号中的噪声越小。 但是在这里我们必须要小心,因为同时延迟也会增加。 另外,您可以跳过有用的信号[8]。
| MPU-9250 | BMI088 |
|---|
| 陀螺仪,16位 |
|---|
| 范围(FS) circ/s (dps) | 分辨率,位(BW = 92Hz) | 范围(FS) circ/s (dps) | 分辨率,位(BW = 64Hz) |
| | \下午125 | 8 |
| \下午250 | 9 | \下午250 | 9 |
| \下午500 | 10 | \下午500 | 10 |
| \下午1000 | 11 | \下午1000 | 11 |
| \下午2000 | 12 | \下午2000 | 12 |
| 加速度计 |
|---|
| 范围(FS),g | 分辨率,位 (NPP=32mg) | 范围(FS),g | 分辨率(X,Y),位 (NXPPY=14mg) |
| \下午2 | 6 | \下午3 | 8 |
| \下午4 | 7 | \下午6 | 9 |
| \下午8 | 8 | \下午12 | 10 |
| \下午16 | 9 | \下午24 | 11 |
这些只是最基本的参数。
这是从哪里来的:
- 飞思卡尔半导体最令人愉快的文件是“多少位数够用?”
- [EE]- “解决方案vs准确性vs灵敏度消除混乱”
- [电子时间]- “意法半导体的MEMS运动传感器:加速度计和陀螺仪”
- [LSB]- “ ADC和DAC最低有效位(LSB)”
- [测量计算]- “ TechTip:准确性,精确度,分辨率和灵敏度”
- [KIT]- “模拟设备加速度计-设备和应用程序”
- [Easyelectronics]- “ Sigma-Delta ADC”
- [放射学家]- “磁力计:工作原理,误差补偿”
- [SO]- “噪声测量”
- [Mide]- “加速度计规格:解释加速度计的数据表”
- [CiberLeninka] -Δ-ΣADC滤波器
- [SciEd]- “随着采样频率的变化实现数字滤波的特征”
- [MPU6050]- “使用MPU6050的DLPF”
- [MPU9250_DLPF] -MPU9250陀螺仪噪声DLPF工作调查
- 了解传感器分辨率规格
- 西门子数字信号处理
- STMicroelectronics的MEMS运动传感器
- [TMWorld]- “评估惯性测量单位”
- [Sklyar]-Sklyar B.数字通信。 理论基础和实际应用。